 3D传感器:机器人安全的新方法和新应用
3D传感器:机器人安全的新方法和新应用

若要让机器人与人类安全地协作,就须让机器人以某种方式感知世界,处理所收集的讯息,并产生协作行动。目前协作机器人以触觉作为与人类的沟通和协作手段。机器人触碰到东西是其停止并避免伤害人类的讯号。但更好的解决方案是能让机器人看到其环境及周遭人类的先进视觉系统。
根据TheRobotReport报导,先进视觉系统能让机器人看到其环境及其中的人类,并以安全和协作的方式做出相应反应。这能让机器人实施速度和分离监测(SpeedandSeparationMonitoring;SSM)标准。
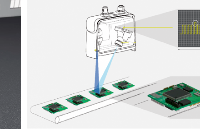
3D感测系统能让机器人与人类员工更紧密地协作
问题在于视觉系统须够先进,不仅要能检测、映射和对其看见的东西做分类,同时也要能预测它所看到的轨迹。
虽然像2D光达(LiDAR)等许多新技术确实能让机器人看到其环境。但这些技术在几个方面不尽如人意,且无法提供实现SSM标准所需的丰富数据。2D光达1次仅扫描1个平面,若保护工业机器人的2D光达侦测到几公尺远的东西,它将不得不完全停止机器人,因为入侵的可能是1个人的腿,这意味著那个人的手臂会更接近。
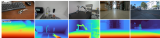
然而,提供3D深度讯息的新型传感器,如3D飞时(TOF)镜头、3D光达和立体视觉镜头,可更准确地检测和定位对区域的入侵。若守卫机器人的3D系统在几公尺之外检测到人的腿,它将允许机器人继续操作,直到对方实际伸出其手臂朝向机器人为止。
这能让机器人的动作与人的动作之间有更紧密的联系,更意味著工业工程师将能设计将任务的每个子集适当地分配给人或机器。这种工作分配可最大限度地提高工作单元效率,降低成本并保证人员安全。
VeoRobotics正在打造1个3D感测系统。该系统使用自定义3D飞时镜头和计算机视觉算法实现SSM标准。Veo系统会根据机器人的状态和其它危险、操作员的位置及包括其它机器人安全功能和系统延迟在内的参数,来测量必要的保护间隔距离。
Veo系统在3D下以每秒30帧的速度感知机器人周围的环境状态,能确认机器人环境的所有可能的未来状态,预测可能未检测到的物品并监测潜在的不安全状况。然后它会与机器人控制系统通讯,好在机器人接触到不应接触的任何东西之前减慢或停止机器人。
-
机器人
+关注
关注
214文章
31639浏览量
224532 -
视觉系统
+关注
关注
3文章
387浏览量
31903 -
3D传感器
+关注
关注
4文章
121浏览量
27116
原文标题:3D传感器:机器人安全的新方法和新应用
文章出处:【微信号:iotmag,微信公众号:iotmag】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
人形机器人关节扭矩传感器的详细应用场景及解决方案
六维力传感器:当机器人拥有“真实触觉”,未来会发生什么?
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
禾赛科技2025年割草机器人3D激光雷达出货量第一
机器人用霍尔电流传感器,能提升操作安全性么?

迈来芯3D磁传感推动机器人舵机技术升级

奥比中光领跑韩国机器人3D视觉市场
iTOF技术,多样化的3D视觉应用
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
普渡科技推出3D感知AI扫地机器人PUDU MT1 Max
3D视觉传感器如何变革工业领域
工业机器人的特点
基于NVIDIA AI的3D机器人感知与地图构建系统设计



评论