 解析ABB机器人与西门子S7-1200 profinet通讯
解析ABB机器人与西门子S7-1200 profinet通讯

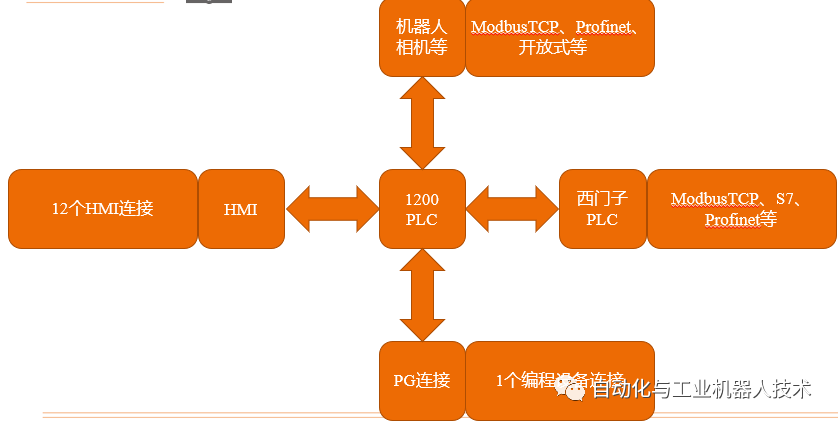
一:网络组态
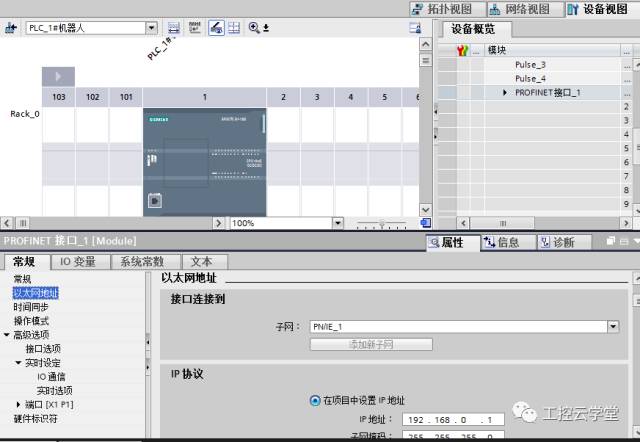
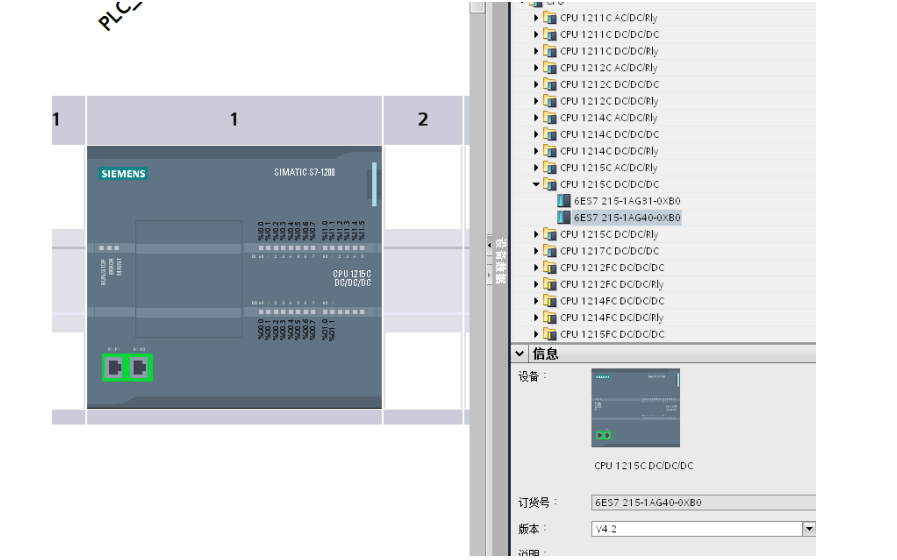
2.事先在博途软件中加载机器人相应的GSD文件(DSQC688),然后在硬件配置中组态机器人,配置通讯映像区模块。
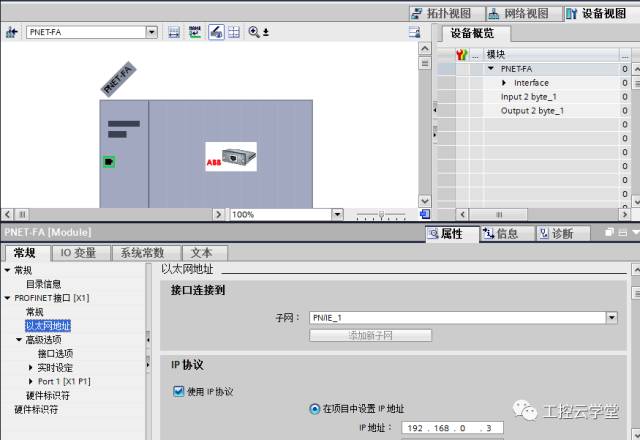
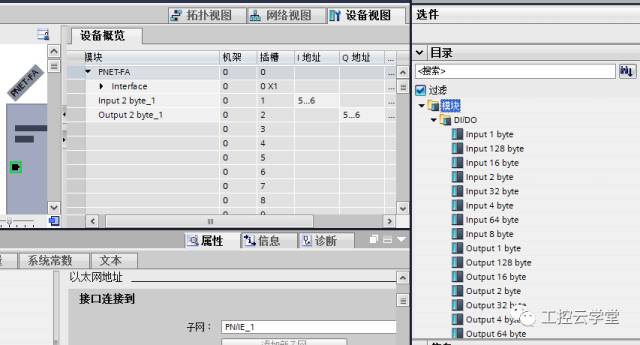
注意:此处配置的为两个字节的输入模块跟两个字节的输出模块,在机器人试教器上的设置要对应。
二:机器人试教器上的设置
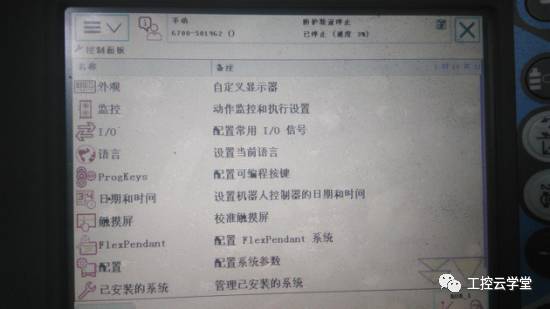
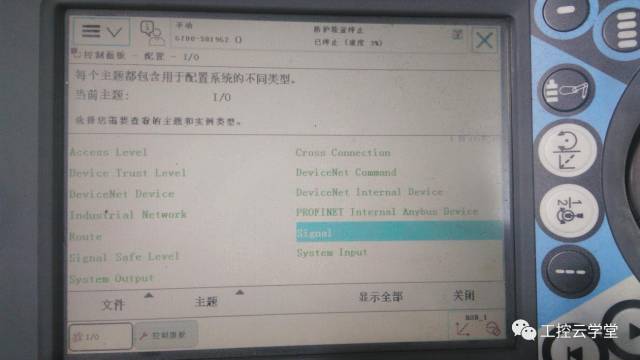
1.控制面板
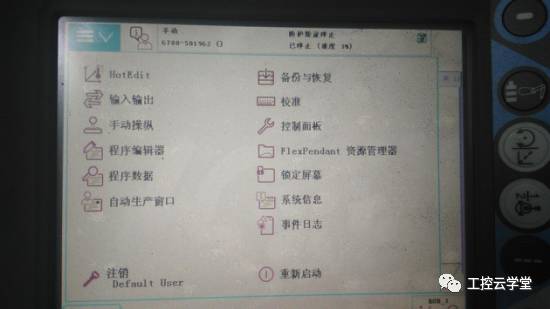
2.配置
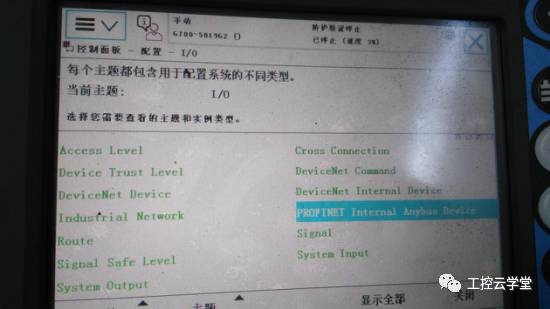
3.PROFINET internal Anybus Device
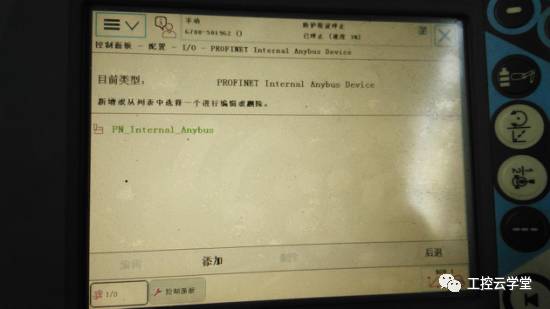
4.PN_internal anybus
5.PN_internal anybus 设置:
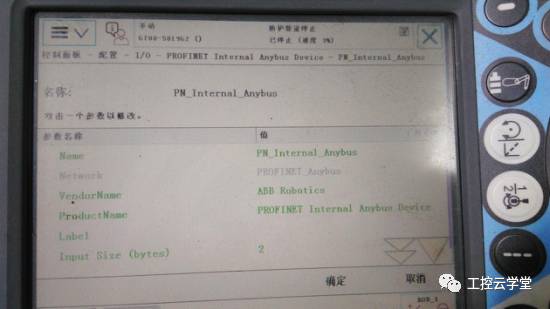
注意:Input size(bytes) 与Input size(bytes)后面的数字“2”代表这通讯的数据量,要跟前面提到的在博途软件中配置机器人模块时选择的想对应。(在博途软件中配置了2个字节,在此处就填“2”,如果前面选择64个字节,那么此处就应该是“64”)。其他名称都可以不用更
改用默认名称。
6.上述5完成后返回上一层 然后选择“Signal”
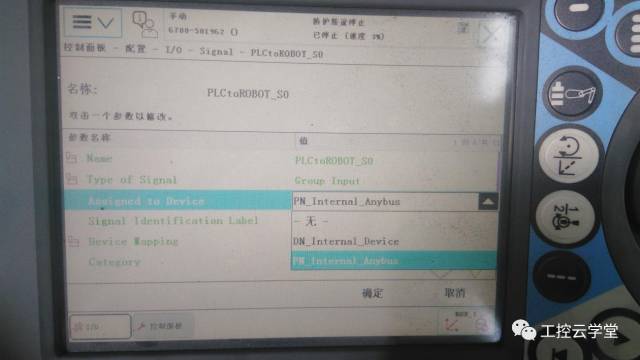
7.做信号配置
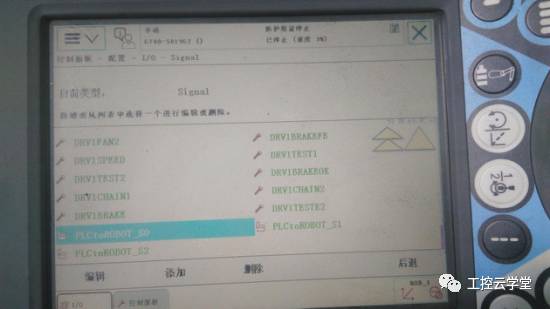
点击“添加”进入到下一个画面:
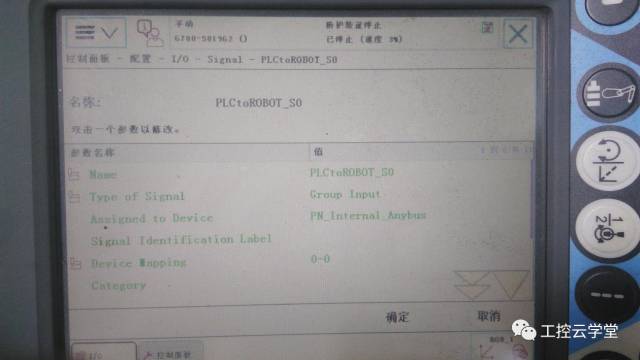
1.)Name:设置信号名称,点击后修改。
2.)Type of signal:选择信号类型,如下图,选择“Group input”为数组数字量输入。
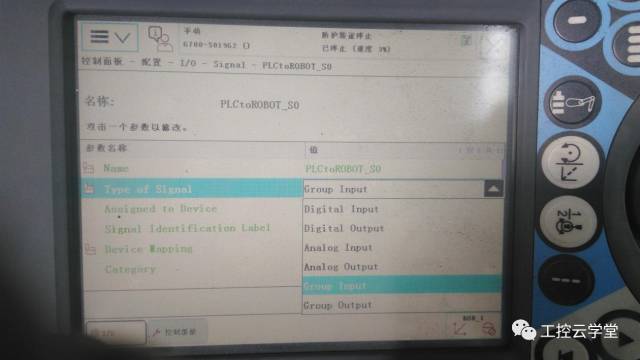
Digital input:数字量输入
Digital output:数字量输出
Analog output:模拟量输出
Group input:数组输入
Group output:数组输出
3.)Assigned to device 选择“PN_internal_anybus”
4.)Device mapping
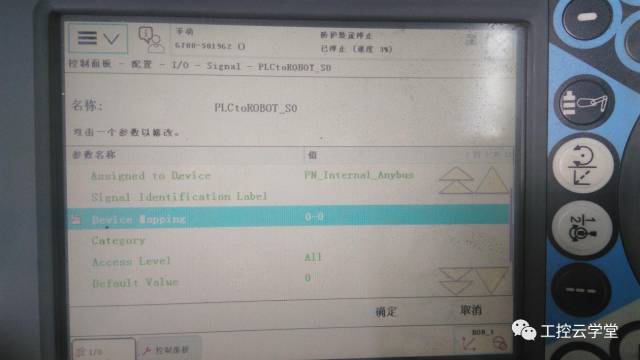
选择“0”指定数据的第一个位的数据。“0-0”同样也是第一位的数据。
选择“0-3”指定接收数据的第一位到第四位的数据。
-
机器人
+关注
关注
214文章
31697浏览量
224668 -
西门子
+关注
关注
98文章
3426浏览量
120967 -
ABB
+关注
关注
26文章
580浏览量
57620
原文标题:ABB机器人与西门子S7-1200 profinet通讯
文章出处:【微信号:GKYXT1508,微信公众号:工控云学堂】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
西门子S7-1200如何通过PROFINET通讯实现V90PN伺服控制


西门子1200PLC之间的ModbusTCP通讯如何实现?
EPR6-S工业机器人通过EtherCAT转profinet网关接入西门子系统

PLC西门子S7-200smart和S7-1200的区别?
西门子S7-1200 PLC的基本功能
ABB机器人与西门子PLC的Profinet通讯设置
西门子S7-1200 PLC的指令介绍
稳联技术Profinet嵌入式开发板与西门子PLC S7-1200




评论