 为无人驾驶飞行器构建冗余电源总线
为无人驾驶飞行器构建冗余电源总线

无人驾驶飞行器(UAV)未来市场成功的关键标准是可靠性。我们希望他们携带包裹或对人口稠密地区进行监视。突然意外的动力损失对于空中无人机来说是不可接受的,因为当他们跌落到地面时会有旁观者受伤的风险。因此,冗余是设计架构的重要组成部分,尤其是电力传输子系统,因为它不仅可以实现引导系统,还可以实现转子叶片本身。
通过冗余提高可靠性的可能架构是使用两个或多个单独的电池组,每个电池组供电一个单独的DC/DC转换器。如果一个电池或转换器发生故障,其他电池或转换器可以接管,尽管飞行时间大大缩短。然而,这应足以使无人机进入受控着陆。
N + 1架构已被证明是大型系统中一种经济有效的方法,可提供容错功能。在正常操作条件下一次电源失效的概率非常低,因此在电流共享模式下运行的两个或三个阵列中增加一个额外的电源不会显着增加成本。在实践中,由于尺寸和重量问题,双冗余1 + 1架构可能在无人机设计中受到青睐。
在双冗余架构中,选择合适的DC/DC非常重要转换器,因为如果一侧发生故障,电流负载会发生变化。通常,转换器在较高负载下表现出效率的提高,在接近满负载时达到峰值。在正常情况下,每个DC/DC转换器的工作负载不到50%,这可能意味着效率下降。多相转换器架构可以帮助解决问题。
这种设计使用多个开关电路在满负载下执行转换。随着负载需求下降,可以关闭不再使用的相位,而剩余的相位则以接近峰值效率运行。
在使用多个转换器的电源电路中,仅仅是简单的将输出连接到一起。一个问题是两个转换器不会平均分配电流需求,并且它存在负载调节的问题。如果电源脱机,可能会出现短路故障,导致整个系统发生故障。 ORing器件用于保护系统免受功率分配问题的影响。
最简单的形式是,ORing器件是二极管。通过允许电流仅在一个方向流动,ORing二极管将故障与冗余总线隔离,允许系统使用剩余的电源继续运行。就其本质而言,二极管将瞬间断开输入电源的短路。然而,由于效率考虑,传统的二极管可能不是最合适的选择,特别是在能量效率方面。在ORing应用中,二极管的大部分工作寿命将用于正向导通模式,由于二极管固有的压降而耗散功率和热量。
用N沟道MOSFET调用更换ORing二极管虽然复杂程度略有提高,但MOSFET的导电性和低压降提高了效率和冷却的可能性 - 因此节省了散热器的额外重量,尽管很小。事实上,与二极管相比,有源ORing解决方案的功耗可降低10倍。
有一个主动ORing的权衡。接通时,与二极管不同,它允许电流在源极和漏极之间的任一方向流动。如果输入电源由于短路而发生故障,则可以感应出大的反向电流,并且只要MOSFET导通,MOSFET就会通过电流。冗余总线不能长时间暴露在输入短路中,否则总线电压将下降并导致系统故障。因此,基于MOSFET的ORing系统必须能够快速检测反向电流故障条件。
控制器电路检测源极和漏极两端的电压,以确定流过MOSFET的电流的大小和极性。 MOSFET。栅极控制引脚根据控制器算法在导通和非导通状态之间切换MOSFET。由此产生的行为是整流器的行为 - MOSFET的源极和漏极引脚分别作为二极管的阳极和阴极引脚。
最关键的参数是反向电流阈值:当超过它时提供输入电源故障的指示。该阈值需要处于允许一致且快速检测故障的水平。故障的响应时间需要很快,以限制冗余总线上的反向电流量和潜在电压下降量。
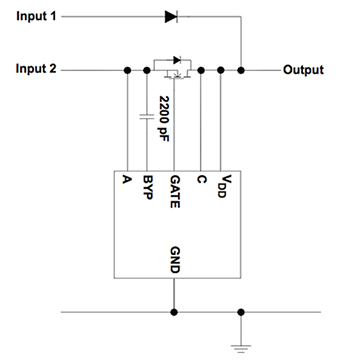
图1:使用TPS241x系列器件在电源总线上使用ORing控制器。
虽然分立电路可以控制N沟道MOSFET,现成的解决方案,如德州仪器TPS2412和TPS2413,可提供对反向电流的快速响应。 TPS2412和TPS2413主要区别在于设置MOSFET状态的控制环路。 TPS2412为输入电压的较慢变化提供了更温和的开启和关闭策略,这也降低了在轻载时执行开关循环的趋势,这可能发生在更简单的仅比较器电路上。这可以使MOSFET在调节有效时在轻负载时看起来具有高电阻。当从轻负载条件施加大的阶跃负载时,发生瞬时输出电压下降。 TPS2412更适合于可以在中间轨道总线上使用的情况,该总线为下游负载点调节器树供电。如果MOSFET上的电压大于10 mV,则TPS2413将导通MOSFET,如果阈值变为负,则执行快速关断。对于要实施的关闭,阈值必须是负的,在非常轻的负载下可能并非总是如此。然而,在飞行中,无人机不太可能处于这种情况。轻载条件下的阶跃负载在没有明显电压下降的情况下进行处理,这有助于保持输出总线的稳压。
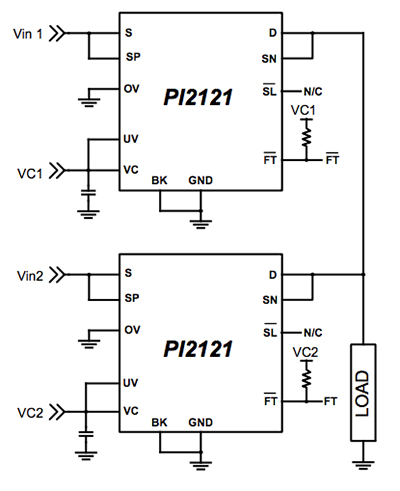
图2:Cool-ORing设备的典型用途。
另一种方法是选择将MOSFET和控制器封装在一起的封装器件,例如Vicor的Cool-ORing系列器件。它们将高速ORing MOSFET控制器和极低导通电阻MOSFET组合在一个5 x 7 mm的栅格阵列(LGA)封装中。这些封装可实现低至1.5μΩ的典型导通电阻,同时可在宽工作温度范围内提供高达24 A的连续负载电流。该设计可用于低压,高端应用,通过将支持电路封装在一起,与分立式解决方案相比,可节省电路板空间。这些组件可以快速响应80 ns的故障条件。
通过为冗余行为提供高效支持,ORing架构中的MOSFET控制器代表了构建可靠无人机的解决方案的一部分。结合高效率的DC/DC转换器将有助于使它们在空中传播更长时间。
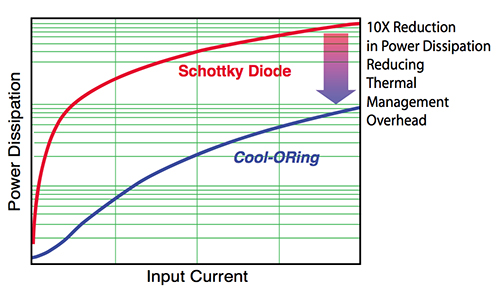
图3:传统二极管和MOSFET控制器之间的功率效率比较,以Cool-ORing系列为例。
-
电源
+关注
关注
185文章
18985浏览量
264542 -
控制器
+关注
关注
114文章
17877浏览量
195139 -
无人驾驶
+关注
关注
100文章
4309浏览量
127101
发布评论请先 登录
时间同步在无人驾驶领域的应用

高可靠冗余电源的理想之选:MAX8585 ORing MOSFET控制器
MAX8535:冗余电源的ORing MOSFET控制器
高可靠性冗余电源的理想选择:MAX8536 ORing MOSFET控制器
芯片电感/半导体模组磁性元器件在低空飞行器领域的应用范围及其作用
才茂通信工业路由器助力无人驾驶全场景落地应用
低空飞行器(如eVTOL、物流无人机、城市空中交通飞行器)的适航认证

无人机与机器人协同技术日益广泛的应用
无人驾驶:智能决策与精准执行的融合
广汽高域复合翼飞行汽车GOVY AirJet正式获颁特许飞行证 无人驾驶航空器特许飞行证

臂螺旋天线:为无人驾驶机器打造高精度导航新体验
低空物流:无人机开启未来配送新篇章
智行者科技无人驾驶小巴落地海南
使用 Betaflight 和树莓派实现 FPV 无人机自主飞行!





评论