 自适应巡航是什么
自适应巡航是什么

自适应巡航控制系统是一种智能化的自动控制系统,它是在早已存在的巡航控制技术的基础上发展而来的。在车辆行驶过程中,安装在车辆前部的车距传感器(雷达)持续扫描车辆前方道路,同时轮速传感器采集车速信号。
当与前车之间的距离过小时,ACC控制单元可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,以使车辆与前方车辆始终保持安全距离。
自适应巡航控制(ACC)是一个允许车辆巡航控制系统通过调整速度以适应交通状况的汽车功能。安装在车辆前方的雷达用于检测在本车前进道路上是否存在速度更慢的车辆。若存在速度更慢的车辆,ACC系统会降低车速并控制与前方车辆的间隙或时间间隙。若系统检测到前方车辆并不在本车行驶道路上时将加快本车速度使之回到之前所设定的速度。此操作实现了在无司机干预下的自主减速或加速。ACC控制车速的主要方式是通过发动机油门控制和适当的制动。
自适应巡航控制系统一般在车速大于25 km/h时才会起作用,而当车速降低到25 km/h以下时,就需要驾驶者进行人工控制。通过系统软件的升级,自适应巡航控制系统可以实现“停车/起步”功能,以应对在城市中行驶时频繁的停车和起步情况。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
ACC
+关注
关注
1文章
61浏览量
23649 -
巡航控制
+关注
关注
0文章
4浏览量
4205
发布评论请先 登录
相关推荐
热点推荐
ADAS测试避坑指南:智能驾驶的“安全锁”,到底该怎么测?
“开启ACC自适应巡航后,前车急刹,我的车却毫无反应”——这是某新能源车型ADAS实车测试中发生的真实险情。幸好测试场地封闭,才避免了碰撞事故。如今“L2+级智能驾驶”已成车企标配,但很多人

AMD Versal自适应SoC内置自校准的工作原理
本文提供有关 AMD Versal 自适应 SoC 内置自校准 (BISC) 工作方式的详细信息。此外还详述了 Versal 的异步模式及其对 BISC 的影响。
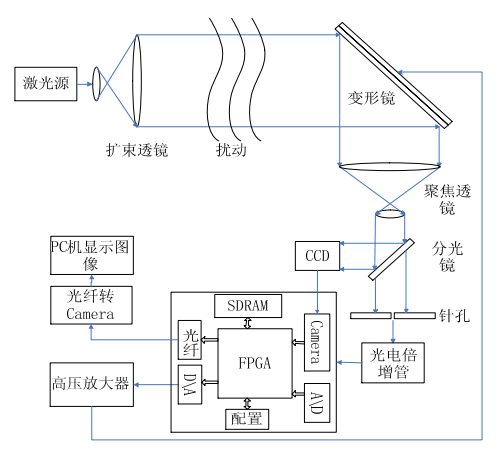
高压放大器驱动:基于FPGA的SPGD自适应光学控制平台的探索
实验名称: 基于FPGA的SPGD自适应光学控制平台整体设计 测试目的: 在分析优化式自适应光学系统平台的基础上,结合SPGD算法原理以及项目实际需求,对SPGD自适应光学控制平台进行方案设计,确定

电磁干扰自适应抑制系统平台全面解析
电磁干扰自适应抑制系统平台精简解析 北京华盛恒辉电磁干扰自适应抑制系统平台,是针对复杂电磁环境下电子设备稳定运行需求设计的综合性解决方案,通过整合多元技术实现动态、智能的干扰抑制。以下从系统架构
NTC热敏电阻在ADAS系统中的应用
ADAS系统的各个子系统(自适应巡航系统、自动泊车系统、盲点侦测系统等)在工作过程中需要收集大量数据并上传至ECU处理,该过程中会产生热量,为有效地延长ADAS系统的使用寿命,增强器安全性及可靠性,需要置入NTC热敏电阻进行精确测温,配合系统的主/被动散热。

SLAM技术在智能驾驶领域的应用
随着人工智能和自动驾驶技术的进步,车辆搭载的辅助驾驶系统可以实现越来越强的功能,如自适应巡航、高级变道辅助及自动泊车等。为了在复杂环境下对这些高阶功能实现支持,需要对车辆自身的位置以及车辆周围的环境

博世推出两款全新雷达芯片SX600和SX601
为进一步强化这些安全关键能力,博世推出了全新一代雷达SoC解决方案——SX600和SX601。这两款芯片可支持符合SAE L2+等级的辅助驾驶,助力自动紧急制动、自适应巡航控制、盲区监测和变道辅助等多种ADAS应用。
智能驾驶:重塑未来出行的技术革命
深刻改变交通行业的格局。 智能驾驶的分级与技术架构 根据国际汽车工程师学会(SAE)标准,智能驾驶分为L0-L5六个等级: - L1-L2(辅助驾驶):如自适应巡航(ACC)、车道保持(LKA),需驾驶员随时接管。 - L3(有条件自动驾驶):系统在特定场
基于模糊自适应PID控制的永磁同步电机伺服系统研究
在对模糊控制的基本理论和PD控制的功能进行分析的基础上,对永礁同步电机进行数学建模,通过d-q变换和park变换,得到永磁同步电机数学模型的传递画数,在此基础上,运用模糊控制理论,采用模糊自适应PD
发表于 07-29 16:16
基于FPGA LMS算法的自适应滤波器设计
自适应滤波是近几十年发展起来的信号处理理论的的新分支。随着人们在该领域研究的不断深入,自适应处理的理论和技术日趋完善,其应用领域也越来越广泛。自适应滤波在通信、控制、语言分析和综合、地震信号处理
无刷直流电机自适应模糊直接转矩控制研究
针对无刷直流电机( BLDCM)转矩脉动较大和传统 P1速度环调节能力差的问题,提出了自适应模糊直接转矩控制的策略。集成了转矩直接控制和模糊控制自适应强的优点,可以有效抑制转矩脉动和加快转矩响应速度
发表于 07-09 14:20
无刷直流电机自适应模糊PID控制系统
摘要:针对无刷直流电机传统PID控制存在精度低、抗于抗能力差及模糊控制稳态精度不高等问题,研究了一种自适应模糊PID控制方法。论文分析了直流无刷电机的工作原理,建立了直流无刷电机自适应模期PID
发表于 07-09 14:18
CYW43907使用AP功能时是否具有自适应功能?
我们想在我们的产品中使用这种芯片来获得 CE 注册证书,CE 需要自适应功能,但是我们在数据表和源包中找不到任何消息。functions 要执行如下:
启动时自动扫描并选择干扰较小的频道,遇到干扰
发表于 07-09 08:21



评论