 ADAS测试避坑指南:智能驾驶的“安全锁”,到底该怎么测?
ADAS测试避坑指南:智能驾驶的“安全锁”,到底该怎么测?

“开启ACC自适应巡航后,前车急刹,我的车却毫无反应”——这是某新能源车型ADAS实车测试中发生的真实险情。幸好测试场地封闭,才避免了碰撞事故。如今“L2+级智能驾驶”已成车企标配,但很多人不知道:ADAS功能再炫酷,若测试不到位,反而会变成“马路杀手”。
作为深耕车载测试10年的工程师,我参与过12款车型的ADAS测试项目,见过太多因“测试漏项”导致的功能缺陷:车道保持突然“跑偏”、AEB自动刹车延迟、BSD盲区监测误报……ADAS不是“炫技工具”,而是守护行车安全的核心系统,其测试的严谨性直接决定智能驾驶的可靠性。今天就深扒ADAS测试的核心逻辑:从必测场景、高频坑点到实战技巧,带你看透ADAS测试的关键所在!
核心认知:ADAS(高级驾驶辅助系统)是通过摄像头、雷达、超声波等传感器获取环境数据,实现ACC(自适应巡航)、AEB(自动紧急制动)、LKA(车道保持辅助)等功能的综合系统。测试核心是验证“传感器感知准确、算法决策合理、执行器响应及时”,三者缺一不可。
ADAS测试的3大核心原则:安全、场景、闭环
不同于车载仪表、IVI等辅助系统,ADAS直接介入驾驶决策,测试必须坚守三大原则,容不得半点马虎:
a. 安全优先原则:所有测试必须在封闭场地或专业测试路段进行,配备紧急接管人员和安全缓冲装置,严禁在开放道路进行风险测试;
b. 场景全覆盖原则:要覆盖“晴天/雨天/夜间”“高速/城区/乡村”“拥堵/畅通/突发”等全场景,极端场景(如强光直射、隧道进出)更要重点测;
c. 闭环验证原则:从“传感器数据采集→算法决策输出→执行器动作反馈”全链路验证,确保每个环节无断点、无延迟。
这三大原则是ADAS测试的“红线”,任何一次违规测试,都可能引发不可挽回的后果。
拆解6大核心功能测试:每个场景都藏着“生死考验”
ADAS功能繁多,但核心是“感知-决策-执行”的闭环,以下6大功能是测试的重中之重,每个功能都有明确的测试标准和避坑要点:
1. AEB自动紧急制动测试:避免碰撞的“最后防线”
AEB是ADAS的“保命功能”,测试核心是验证“不同场景下能否及时刹车”,漏测任何一个场景都可能致命:
a. 基础场景测试
测试步骤:1. 在封闭场地设置静止目标车(模拟前车停驶),测试车以30km/h、50km/h、70km/h速度行驶;2. 记录AEB触发时机、刹车距离及是否碰撞;3. 更换目标物为“行人假人”“骑行假人”重复测试。
预期结果:1. 30-50km/h速度下可完全避免碰撞,70km/h速度下碰撞速度≤10km/h(低速碰撞);2. 触发响应时间≤200ms,刹车过程平稳无突兀;3. 对行人、骑行者的识别准确率≥95%。
真实坑点:曾测试某车型时发现,雨天路面湿滑时,AEB刹车距离比晴天增加30%,导致50km/h速度下发生碰撞,排查后是算法未适配湿滑路面摩擦系数。
b. 复杂场景测试
重点测试“鬼探头”(行人从路边车辆后突然冲出)、“加塞场景”(邻车道车辆突然并入本车道):
测试技巧:用“动态假人+可移动目标车”模拟真实场景,测试车速度设置40-60km/h(城区常见速度),观察AEB是否能精准识别并制动。
预期结果:“鬼探头”场景下识别准确率≥90%,加塞场景下制动响应≤300ms。
2. ACC自适应巡航测试:高速行驶的“得力助手”
ACC看似“简单”,但高速场景下的稳定性直接影响安全,测试要重点关注“跟车距离、速度调节、加减速平顺性”:
a. 跟车距离与速度调节测试
测试步骤:1. 封闭高速赛道设置前车,测试车开启ACC并设置3档跟车距离(近/中/远);2. 前车以60km/h、90km/h、120km/h速度行驶,随后前车加速/减速/停车,观察测试车响应;3. 模拟“前车变道离开”场景,看测试车是否匀速行驶。
预期结果:1. 不同跟车距离下,与前车距离误差≤10%;2. 前车加速/减速时,测试车调节速度平稳,无急加减速(加速度≤0.3g);3. 前车变道后,测试车保持设定速度匀速行驶,无速度漂移。
b. 极端工况测试
重点测试“弯道跟车”“坡道跟车”场景:在半径150米的弯道、坡度15%的坡道上,前车以80km/h行驶,测试车开启ACC跟车。
预期结果:弯道跟车无偏离车道,坡道跟车距离稳定,无溜车或过度加速现象。
避坑技巧:测试时要记录“雷达与摄像头的融合数据”,曾发现某车型弯道时仅依赖摄像头,因弯道遮挡导致跟车距离突变,后期优化了雷达的探测角度。
3. LKA车道保持辅助测试:防止“跑偏”的核心保障
LKA的核心是“让车始终保持在车道内”,测试要覆盖“不同路面、不同光照、不同车道线”场景,避免出现“该保持时不保持,不该干预时乱干预”:
a、基础场景测试
测试步骤:1. 在封闭场地设置清晰车道线(白色/黄色实线、虚线),测试车以60km/h、90km/h行驶;2. 人为轻微偏离车道,观察LKA是否通过转向干预纠正;3. 关闭LKA功能,确认无转向干预。
预期结果:1. 偏离车道≥30cm时触发干预,纠正后车辆居中行驶,干预力度柔和(驾驶员可轻松接管);2. 实线、虚线场景下识别准确率≥98%;3. 功能关闭后无残留干预,转向轻盈。
b、复杂场景测试
重点测试“模糊车道线”(雨天磨损车道线)、“光照干扰”(正午强光直射摄像头)、“隧道进出”(明暗交替)场景:预期结果:模糊车道线识别准确率≥90%,强光/明暗交替时无识别失效,干预响应延迟≤500ms。
真实案例:某车型在隧道出口因强光直射,LKA突然失效,车辆偏离车道,后期通过优化摄像头曝光算法解决问题。
4. BSD盲区监测+LCA变道辅助测试:消除“视觉死角”的关键
a. BSD(盲区监测)和LCA(变道辅助)是高速行驶的“安全搭档”,测试核心是验证“盲区有车辆时能否精准告警,变道风险时能否干预”:
b. BSD盲区监测测试
测试步骤:1. 测试车以80km/h行驶,目标车从后方进入测试车右侧盲区;2. 观察仪表/外后视镜告警灯是否亮起;3. 目标车加速超越、减速落后时,记录告警触发与解除时机。
预期结果:1. 目标车进入盲区≤1秒触发告警,告警灯亮度≥500cd/㎡(清晰可见);2. 目标车完全超越后≤2秒解除告警,无误报、漏报。
c. LCA变道辅助测试
测试步骤:1. 测试车以100km/h行驶,开启转向灯准备变道,此时目标车处于盲区;2. 观察是否有告警提示(声音+灯光),是否干预转向;3. 加速拉开与目标车距离后,再次变道观察。
预期结果:1. 盲区有车时,立即触发声光告警,同时轻微干预转向(阻止变道);2. 安全距离下变道无干预,转向顺畅。
5. APA自动泊车测试:“新手福音”的隐藏陷阱
APA(自动泊车)是用户感知最强的ADAS功能,但场景复杂性极高,测试时要覆盖“不同车位、不同路况、不同障碍物”:
a. 标准场景测试
测试步骤:1. 设置垂直车位(宽度2.5米)、平行车位(长度5.5米)、斜列车位(45°);2. 测试车开启APA功能,自动搜索车位并泊车;3. 记录泊车时间、车位居中误差、是否碰撞路沿。
预期结果:1. 车位搜索时间≤3秒,泊车完成时间≤60秒;2. 垂直/斜列车位居中误差≤15cm,平行车位前后距离误差≤20cm;3. 无碰撞路沿、压线现象。
b. 复杂场景测试
重点测试“狭小车位”(宽度2.2米)、“坡道车位”(坡度5%)、“有障碍物车位”(车位旁有雪糕筒)场景:
预期结果:狭小车位泊车成功率≥80%,坡道泊车无溜车,障碍物识别准确率100%(绕开障碍物泊车)。
避坑技巧:测试时要模拟“新手操作习惯”,比如不提前打转向灯、车速过快搜索车位,验证功能的容错性。
6. 传感器融合测试:ADAS的“眼睛”不能瞎
摄像头、毫米波雷达、激光雷达(部分车型)是ADAS的“三只眼”,单独工作易受干扰,融合测试是验证“感知准确性”的核心:
a. 单一传感器失效测试
测试步骤:1. 手动屏蔽摄像头(模拟强光失效),仅保留雷达;2. 测试AEB、ACC功能;3. 屏蔽雷达(模拟雨雾干扰),仅保留摄像头,重复测试。
预期结果:1. 单一传感器失效时,功能仍能正常工作(精度允许±10%偏差);2. 无功能完全失效情况,仪表提示“传感器异常”。
b. 融合精度测试
在雨雾、强光、夜间等复杂环境下,测试传感器对“目标距离、速度、类型”的识别精度: 预期结果:目标距离识别误差≤5%,速度识别误差≤3km/h,目标类型(车/人/骑行者)识别准确率≥95%。
ADAS测试高频坑点+解决方案(附真实案例)
结合10+车型测试经验,整理了ADAS测试中最容易踩的5个坑,每个坑都配了实测解决方案,新手必看: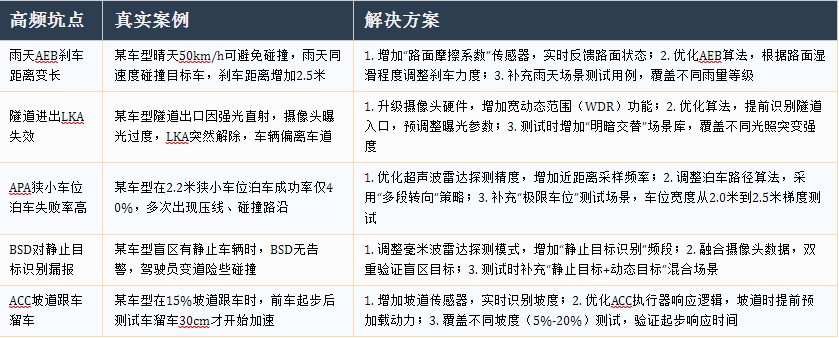
ADAS测试工程师的5个实战技巧
ADAS测试专业性强、场景复杂,掌握这些技巧能大幅提升测试效率和精准度:1. 建立“场景库分级体系”:按“高频场景(如高速ACC跟车)→ 中频场景(如城区APA泊车)→ 极端场景(如暴雪天AEB)”分级,优先覆盖高频场景,再攻克极端场景,避免测试资源浪费;
2. 善用“硬件在环(HIL)测试”:通过HIL测试台模拟传感器数据、道路环境,在实验室就能复现“雨天、强光”等复杂场景,比实车测试效率提升3倍,还能避免安全风险;
3. 关注“用户误用场景”:比如“未系安全带开启ADAS”“高速行驶中突然关闭ACC”,这些用户可能误操作的场景,测试时必须覆盖,验证功能的容错性和告警提示;
4. 强化“数据溯源分析”:测试中出现功能失效时,立即导出传感器数据、算法决策日志,通过数据分析定位是“感知误差”还是“决策错误”,避免盲目复现测试;
5. 紧跟“法规与标准”:ADAS测试必须符合国标GB/T 39262-2020《汽车驾驶辅助系统(ADAS)性能要求及测试方法》,同时关注欧盟Euro NCAP、美国IIHS等国际标准,确保测试结果合规。
本文转自:松勤软件测试
-
测试
+关注
关注
9文章
6374浏览量
131639 -
adas
+关注
关注
311文章
2337浏览量
212101 -
智能驾驶
+关注
关注
5文章
3034浏览量
51372
发布评论请先 登录
ADAS功能开发的经验和技术难点
ADAS的发展给驾驶员驾驶视野的改变
ADAS,要问如果没有ADAS,世界将会怎样?
前视主动安全摄像头为车辆提供量产ADAS产品解决方案
分享一些嵌入式系统编程中内存操作相关的避坑指南
【6月28日|直播】遇见KeysightCare——贵重仪器安全避坑指南

芯片测试大讲堂——半导体参数测试与避坑指南


PLC工业智能网关:功能解析、场景落地与选型避坑攻略

MES系统避坑指南
避坑指南!RK3568开发板选型,这5点没看清千万别下手!(附迅为驱动开发指南资源)
频率源/信号源模块设备怎么选?避坑指南

进线电抗器选型避坑指南|企业必看干货




评论