 AGV小车中的动态路径规划算法揭秘
AGV小车中的动态路径规划算法揭秘

在现代仓储、物流和制造业中,自动导引车(AGV)的身影日益普遍。它们如同勤劳的工蚁,在复杂的环境中自主穿梭,高效地完成物料搬运任务。而支撑AGV实现智能导航的核心技术之一,便是路径规划。特别是当环境并非一成不变时,动态路径规划能力就显得至关重要。本文将深入探讨几种主流的动态路径规划算法(如A、Dijkstra、RRT等),并解析它们如何在AGV行业中大显身手。
为何需要动态路径规划?
1.简介
传统的静态路径规划假设环境是完全已知的,并且在AGV执行任务期间保持不变。然而,现实世界充满了变数:
●突然出现的临时障碍物(如掉落的货物、行人或其他车辆)
●变化的交通管制区域
●需要临时调整的目标点或任务
在这些情况下,AGV需要具备实时感知环境变化并快速重新规划路径的能力,这就是动态路径规划的用武之地。它赋予了AGV“随机应变”的智慧,确保其在复杂多变的环境中依然能够安全、高效地运行。
主流路径规划算法解析
1.Dijkstra算法:全局最优的基石
Dijkstra算法是一种经典的图搜索算法,用于查找图中单个源点到所有其他顶点的最短路径。
●核心思想:
从起点开始,像水波纹一样向外扩散。每次访问当前距离起点最近的未访问节点,并更新其邻居的距离。
●过程:
○初始化: 起点距离设为0,其他点设为无穷大。创建待访问节点的优先队列(按距离排序)。
○迭代:从队列取出距离最小的节点 u。
○松弛:对 u 的每个邻居 v,若经 u 到 v 的路径更短,则更新 v 的距离并加入队列。
○标记:标记 u 为已访问。
○重复:直到目标节点被取出,或队列为空。
●AGV小车应用:
○优点: 保证找到全局最短路径(边权非负时)。
○缺点: 搜索范围大,无方向性,计算效率较低(尤其在大地图)。动态障碍物需重算全局路径,实时性差。
○定位: 常作其他算法(如A*)基础,或在环境简单时使用。

↑Dijkstra算法从起点开始,像波纹一样逐层探索节点
2.A* 算法:启发式的智慧导航
A*(A-Star)算法是对Dijkstra算法的优化,它引入了启发式信息来引导搜索方向,从而更快地找到目标。
●核心思想: 选择下一个访问节点时,同时考虑:
○g(n): 从起始点到节点n的实际路径成本。
○h(n): 从节点n到目标的估计成本(启发函数,如曼哈顿/欧氏距离)。
○评估函数:f(n) = g(n) + h(n)
○关键要求:h(n)需满足可采纳性(估计值≤实际值)和一致性,以保证找到最优解。
●过程: 类似于Dijkstra,类似Dijkstra,但优先队列按f(n)排序,优先扩展f(n)最小的节点,使搜索更有方向性地朝向目标。
●AGV应用:
○优点:在启发函数满足条件时,保证最优路径且通常比Dijkstra效率高得多。广泛用于AGV全局路径规划。
○缺点: 性能受启发函数选择影响;内存消耗可能大;环境频繁变化时仍需重规划。
○动态变种: 为应对动态环境,有D*, LPA*, D* Lite等算法。它们能在环境变化时增量式更新路径(而非完全重算),显著提高响应速度。D* Lite是AGV动态避障常用算法。
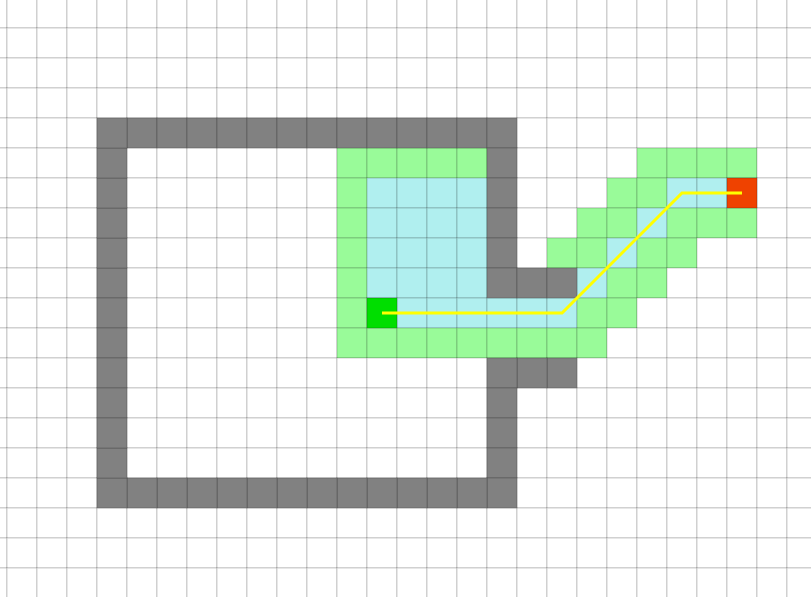
↑A*算法在启发函数引导下,搜索区域更集中地朝向目标点扩展,而不是盲目扩散
3.RRT* 算法:拥抱随机性与优化
RRT* (Rapidly-exploring Random Tree Star) 一种基于采样的路径规划算法,特别适合高维空间和复杂约束(如车辆运动学)。
●核心思想:
通过在状态空间随机采样,逐步生长一棵从起点开始的树来探索空间。RRT*是RRT的优化版,增加了重连接 (Rewiring) 步骤,使路径能渐近最优(采样点越多,路径越接近最优)。
●过程:
○采样: 在状态空间中随机生成点 x_rand。
○查找最近邻: 在树中找到离 x_rand 最近的节点 x_nearest。
○扩展(Steer): 从 x_nearest 向 x_rand 延伸一个步长(避开障碍),得到新节点 x_new。
○选择父节点(RRT* 特有):在 x_new 附近搜索节点,选择能使 x_new 从起点总路径成本最小的节点 x_min 作为其父节点(需无碰撞)。
○重连接(Rewire - RRT* 特有): 在 x_new 附近搜索节点,若通过 x_new 连接能降低其总路径成本,则更新这些节点的父节点为 x_new。
○添加: 将 x_new 及其连接边加入树中。
○重复: 直到树扩展到目标区域附近。
●AGV应用:
○优点: 处理高维状态(姿态、速度等)和复杂约束能力强;不需要显式环境地图;概率完备性(存在路径则最终能找到);RRT具有渐近最优性。
○缺点: 路径非严格最优(除非无限采样);路径可能不平滑(需后处理);性能对参数敏感;收敛可能较慢。
○动态变种: 如 Dynamic RRT,通过移除/更新树中与动态障碍物碰撞的部分并继续生长来实现重规划。
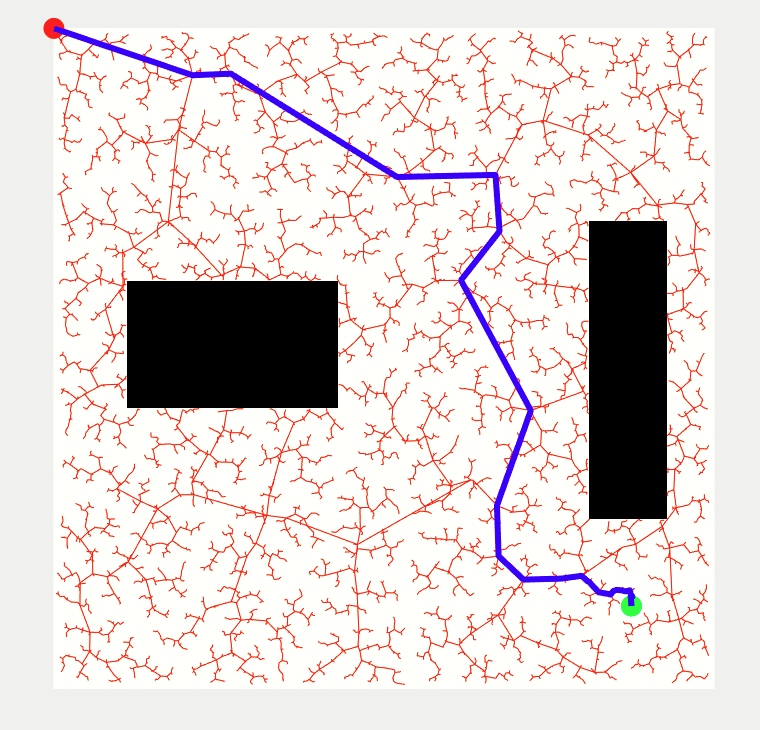
↑RRT*树从起点开始随机生长,探索空间
AGV小车中的动态路径规划实践
# AGV避障应用场景
在实际的AGV应用中,通常不会只使用单一算法,而是结合使用:
1.全局路径规划:
使用A或其变种(如D Lite)或有时是优化后的Dijkstra,在已知的地图上规划出一条从起点到终点的全局最优或次优路径。这条路径通常比较宏观。
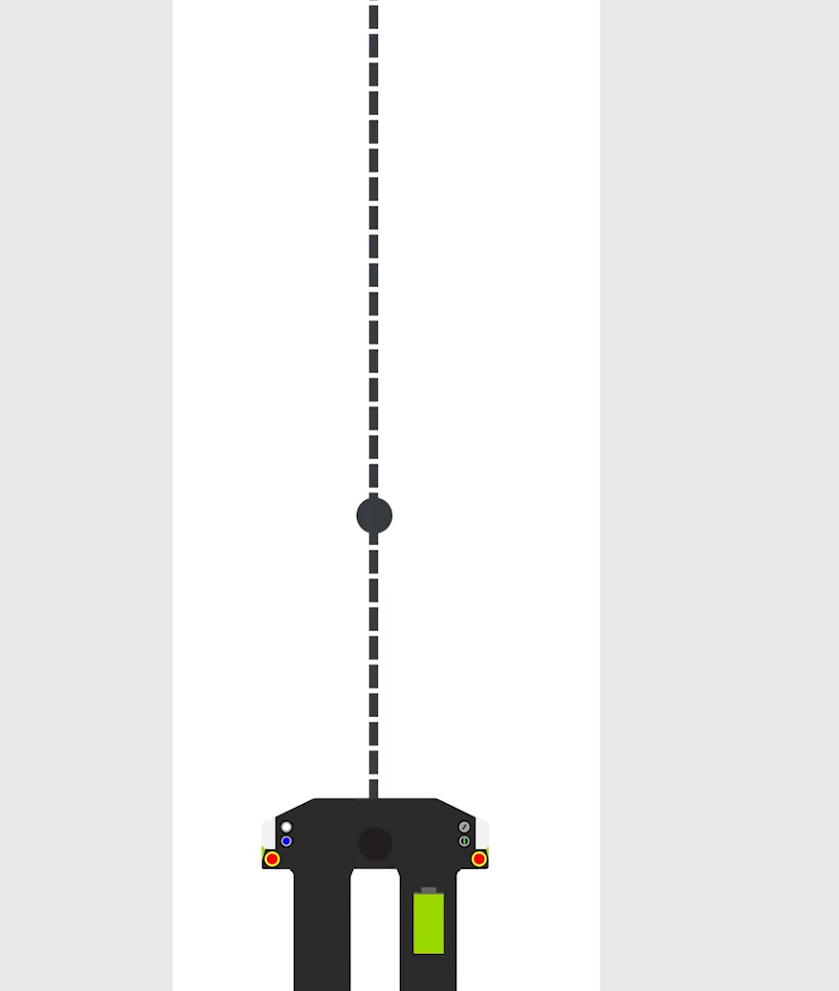
↑全局路径(虚线)
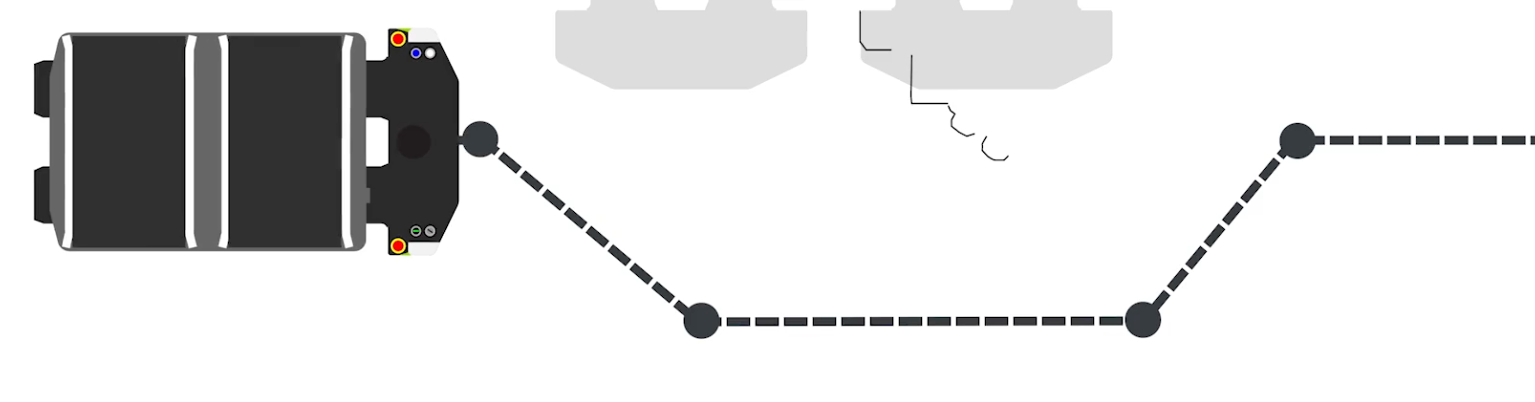
2.局部路径规划/动态避障:
AGV小车在沿着全局路径行驶时,通过传感器(如激光雷达、摄像头)实时感知周围环境。一旦检测到未预料到的障碍物(静态或动态),局部规划器(可能基于DWA - Dynamic Window Approach, TEB - Timed Elastic Band, 或快速重规划的A/RRT变种)会介入,在全局路径的指引下,生成一条短期的、安全的、符合车辆运动学约束的局部避障路径。

↑全局路径(虚线)、突然出现的障碍物(黑色轮廓)
3.路径跟踪:
控制算法负责精确地沿着规划好的路径(无论是全局还是局部)驱动AGV行驶。
这种分层规划的策略兼顾了全局最优性和局部实时性。D Lite等算法因其高效的增量式重规划能力,在处理局部动态变化时表现尤为出色。RRT及其变种则在处理复杂环境和运动约束时更具优势。
↑更改全局路径
挑战与未来趋势
# 挑战
尽管动态路径规划技术取得了长足进步,但在AGV行业应用中仍面临挑战:
●实时性要求: 尤其是在高速运行或密集交通场景下,算法需要在毫秒级完成计算。
●环境不确定性: 传感器噪声、定位误差、动态障碍物预测的困难。
●多AGV协调: 避免冲突、死锁,实现高效协作。
●复杂运动学约束: 考虑AGV的尺寸、转弯半径、加减速性能。
# 未来趋势
未来,动态路径规划将朝着更智能、更高效的方向发展:
●机器学习融合: 利用强化学习、模仿学习等方法让AGV自主学习更优的导航策略。
●预测性规划: 预测其他动态障碍物(如行人、车辆)的意图和轨迹,提前规划。
●语义理解: 让AGV理解环境中的语义信息(如“人行道”、“充电区”),做出更符合场景的决策。
●人机协作: 在人机共存的环境中,实现更安全、自然的交互与避让。
# 结语
Dijkstra、A、RRT及其动态变种,是AGV小车动态路径规划算法库的核心工具。它们如同AGV的“智能之眼”和“动态之舵”,使其能在复杂环境中灵活穿梭、高效作业。理解这些算法的原理和特点,对推动AGV技术乃至整个自动化领域的发展至关重要。随着算法演进和算力提升,未来的AGV必将更加智能、可靠和高效。
作为智能物流解决方案领域的企业,AiTEN海豚之星始终聚焦“智慧工厂”场景,深度整合技术创新与行业需求,已为全球200余家制造业客户提供全方位服务:依托全系列搬运机器人产品矩阵覆盖多样化搬运场景,自研行业级智能调度系统实现多设备高效协同,并通过覆盖售前规划、部署实施到运维优化的全生命周期服务体系,助力企业实现物流智能化转型,持续赋能制造业数字化升级与高质量发展。
审核编辑 黄宇
-
机器人
+关注
关注
213文章
31449浏览量
223677 -
AGV
+关注
关注
28文章
1572浏览量
43791
发布评论请先 登录
板材车间 AGV 小车远程监控系统方案

AGV如何实现全向运动?

Profibus DP 转 RS232:物流仓储立体库 / AGV 位置检测协议转换网关解决方案

纺织厂AGV小车远程监控管理系统方案

无线打通工业链路:Profibus DP 转无线模块赋能 S7-300PLC 与 AGV 小车通信
AGV视觉导航:智能物流的“智慧之眼”
Modbus RTU转Profinet:AGV小车与西门子1500PLC数据互通的大型电商仓储物流案例

深耕安全管理 | 使用AGV小车必看
EtherNet/IP转MODBUS TCP网关配置:SCADA与AGV小车高效通讯指南

三坐标测量机路径规划与补偿技术:核心算法解析
倍加福电感式安全传感器在AGV小车中的应用
如何选择合适的背负式AGV小车
AGV通信第2期 AGV集群智能路径规划解决方案

AGV通信第1期 KAXA无线通信技术赋能AGV智慧物流系统升级

KAXA凯莎科技AGV通信方案如何赋能智能仓储高效运作?



评论