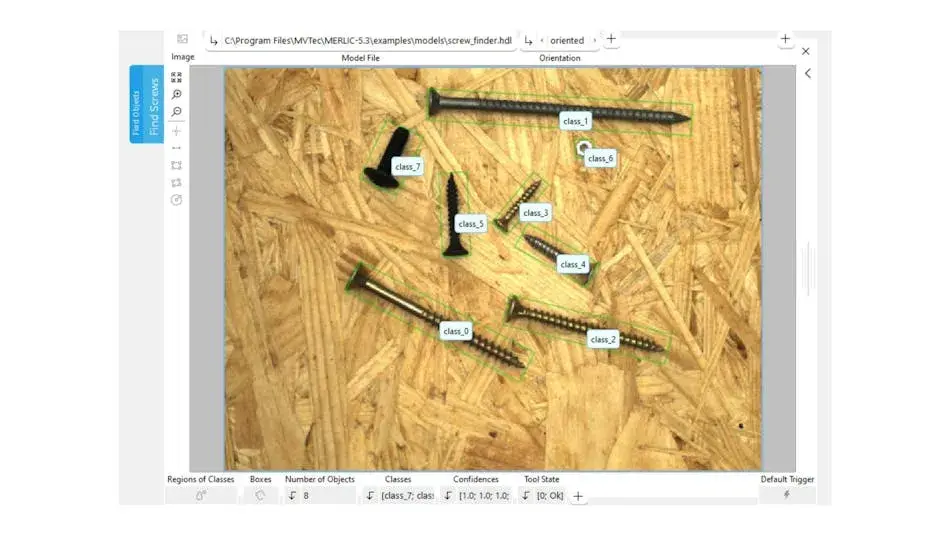
 如何使用机器视觉和机器学习应用程序执行多目标识别
如何使用机器视觉和机器学习应用程序执行多目标识别

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
赛灵思
+关注
关注
33文章
1798浏览量
133656 -
机器视觉
+关注
关注
166文章
4829浏览量
126502 -
机器学习
+关注
关注
67文章
8565浏览量
137226
发布评论请先 登录
相关推荐
热点推荐
机器视觉工业相机与智能相机的区别
机器视觉系统就类似于人类视觉功能,依托光学设备与非接触传感器采集图像信息,再通过智能分析与运算处理数据,完成目标识别、尺寸测量、缺陷检测、精准定位等核心工作。它赋予

智能机器人从0到1系统入门课程 带源码课件 百度网盘下载
机器人 AI 交互:语音识别 + 视觉识别入门实践
在人工智能技术飞速演进的当下,机器人正从冰冷的自动化设备向具备感知能力的智能体进化。传统
发表于 04-11 16:41
机器人主控核心板米尔RK3576 + ROS2,NPU加速实现目标跟随与机械臂抓取
;
移动底盘跟随目标物体,保持安全距离;
机器人机械臂抓取物体,完成“识别-跟随-抓取”闭环。
名词预先了解:
手眼转换:将相机看到的物体坐标转换到机械臂可执行的坐标系下。
逆运动学:
发表于 04-10 21:23
机器视觉系统之工业相机解读
机器视觉系统是一种模拟人类视觉功能,通过光学装置和非接触式传感器获取图像数据,并进行分析和处理,以实现对目标物体的识别、测量、检测和定位等功

机器视觉镜头如何发现深海沉船
百年沉船、深水成像和机器视觉镜头的作用
机器视觉镜头是如何帮助解开一个世纪之谜的?1913 年,一艘名为 Henry B. Smith 的货轮在苏必利尔湖的一场暴风雨中失踪。一个世
发表于 02-11 16:03
机器视觉的核心技术和应用场景
机器视觉正通过让机器“看见”并解读视觉数据来为行业带来变革,进而提升自动化水平、质量控制效率与运营效能。本文将深入探讨机器
如何深度学习机器视觉的应用场景
深度学习视觉应用场景大全 工业制造领域 复杂缺陷检测:处理传统算法难以描述的非标准化缺陷模式 非标产品分类:对形状、颜色、纹理多变的产品进行智能分类 外观质量评估:基于学习的外观质量标准判定 精密
机器视觉检测PIN针
: 结合形态学处理、特征提取(如长宽比、面积)及深度学习(针对复杂缺陷),自动检出弯曲、断裂、变形、污染等。输出与控制:实时显示检测结果(OK/NG)及具体参数数值。生成检测报告,支持数据追溯。NG品自动剔除信号输出,无缝对接产线。了解更多机器
发表于 09-26 15:09
如何在机器视觉中部署深度学习神经网络
人士而言往往难以理解,人们也常常误以为需要扎实的编程技能才能真正掌握并合理使用这项技术。事实上,这种印象忽视了该技术为机器视觉(乃至生产自动化)带来的潜力,因为深度学习并非只属于计算机科学家或
机器视觉系统工业相机的成像原理及如何选型
机器视觉系统是一种模拟人类视觉功能,通过光学装置和非接触式传感器获取图像数据,并进行分析和处理,以实现对目标物体的识别、测量、检测和定位等功

【嘉楠堪智K230开发板试用体验】K230机器视觉相关功能体验
K230开发板摄像头及AI功能测评
摄像头作为机器视觉应用的基础,能够给机器学习模型提供输入,提供输入的质量直接影响机器
发表于 07-08 17:25
详细介绍机场智能指路机器人的工作原理
,如激光雷达、摄像头、麦克风等。激光雷达通过发射激光束并测量反射光的时间来创建周围环境的三维点云图,从而感知周围物体的距离和位置。摄像头用于捕捉视觉图像,识别机场环境中的标识、人物和其他物体。麦克风则
发表于 05-10 18:26
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
:
一、机器人视觉:从理论到实践
第7章详细介绍了ROS2在机器视觉领域的应用,涵盖了相机标定、OpenCV集成、视觉巡线、二维码
发表于 05-03 19:41
【「# ROS 2智能机器人开发实践」阅读体验】+ROS2应用案例
整书的内容非常多有476页。非常厚,像本厚厚的工具书
拿出文章中的小节加以书写吧
视觉应用:二维码识别
二维码识别是视觉应用中的一个重要部分,它在机
发表于 04-27 11:42



评论