 波士顿动力机器人逆天
波士顿动力机器人逆天

一直刷新大众认知的波士顿动力又秀出了新花样。
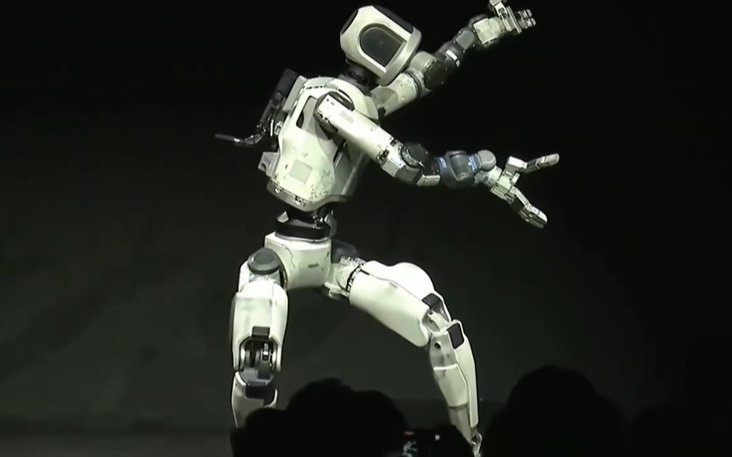
如今,波士顿动力的 Atlas 人形机器人可以玩跑酷了!在该公司发布的一段最新视频中,Atlas 展示了它可以单脚越过障碍物、跳到交错的箱子上,毫不费力!
该公司表示,Atlas 全身重量为 75 公斤,约 165 磅,是“世界上最具活力的人形机器人”。它通过包括腿部、手臂、躯干来分配整个身体的能量和力量以单脚跳过原木。而且,为了不打乱步伐节奏顺利跳跃到40cm 高的台阶上,波士顿动力表示,Atlas 利用了计算机视觉技术可帮助它精准落地。
从原理上讲,该机器人的双脚绑定了一个多层平台,跑动时,其重心在双脚之间来回移动。
据外媒报道,这家位于马萨诸塞州的公司,曾被 Google 收购,后又于 2017 年转卖给软银公司,现在它更像是一个“经常用新功能取笑逗乐的机器人”,目前来看,波士顿动力公司仍未打算为这些机器人找到付费客户。甚至此前曾有媒体报道称,“波士顿动力公司的机器人视频是远程遥控,而不是体现的机器人学习能力,该公司未研制有用的机器人技术。”
值得一提的是,今年 7 月,波士顿动力表示,正计划到 2019 年 7 月实现每年量产 1000 个紧凑型SpotMini 机器人。
简单回顾下波士顿动力的人形机器人的发展历程:
2016 年 6 月:洗碗
2017 年 2 月:空中滑冰
2018 年 2月:偷偷开门
实际上,每当波士顿动力公布关于人形机器人新技能的视频时,就有不少外媒表示“这又是个取代人类的举动!”、“毫不夸张地讲,Atlas 在短短几年内就已从非人类变为超人!”
尽管目前来看,包括波士顿动力在内的诸多人形机器人公司尚未真正投入市场,但它们的出现仍意味着在未来的某一程度上将改变人类生活。
-
机器人
+关注
关注
215文章
31782浏览量
224943 -
计算机
+关注
关注
19文章
7864浏览量
93740 -
人形机器人
+关注
关注
8文章
1127浏览量
18601
原文标题:波士顿动力机器人逆天,人类已无法阻挡它的三级跳!
文章出处:【微信号:rgznai100,微信公众号:rgznai100】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
江智康养机器人
天合机器人与ESI Robotics达成战略合作
带摄像头上班的打工人,正在为物理AI训练取代自己的机器人

再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
CES 2026机器人争霸:中国军团携全栈技术突围,波士顿动力Atlas遇劲敌
工业机器人TOP1,切入人形机器人赛道,意欲何为?

天太机器人与广州大学共建“机器人研发实验室”,产学研协同开新篇章

RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
Meta重磅入局人形机器人,目标打造“机器人界的安卓系统”
全国首届人形机器人线缆技术研讨会圆满召开!
工业机器人的特点
对话:人形机器人连接器与线缆有何攻关点?




评论