 AR1106 双麦声源定位模组 —— 极简设计背后的工程哲学与实践
AR1106 双麦声源定位模组 —— 极简设计背后的工程哲学与实践

在智能交互技术快速迭代的今天,声源定位已从实验室的高精尖技术逐渐下沉到消费级与工业级的各类应用中。然而,当前市场上的声源定位方案普遍存在一个矛盾:高精度多麦阵列方案成本高昂、开发复杂,而低成本方案往往性能拉胯、抗干扰能力差。
AR1106 声源定位模组走出了一条截然不同的技术路线 —— 它以 “极简实用、稳定可靠” 为核心设计理念,通过巧妙的工程取舍,在有限的硬件资源上实现了满足绝大多数普通场景需求的声源定位与联动功能。本文将从硬件架构、算法实现、系统集成三个维度,深入剖析这款模组的技术特点与工程实践价值。
一、硬件架构:极简设计的极致优化
AR1106 最引人注目的特点是其极致精简的硬件设计,这并非简单的元件删减,而是基于大量场景验证后的精准取舍。
1.1 双麦阵列的最优解设计
不同于市面上常见的 3 麦、4 麦甚至更多麦克风的阵列方案,AR1106 采用了最基础的双麦克风阵列设计,并将麦克风间距精确优化为4cm。
技术原理:双麦阵列基于到达时间差 (TDOA) 算法实现定位,通过计算声音到达两个麦克风的时间差来确定声源的角度。理论上,麦克风间距越大,定位精度越高,但同时也会增加模组体积和多径效应的影响。
工程取舍:4cm 的间距是经过上千次实测得出的最优值,它在拾音清晰度、抗干扰能力、模组体积三者之间找到了完美的平衡点。这个间距既能保证 5 米范围内 10° 的定位精度,又能将模组尺寸控制在 18mm×16mm 的极小范围内。
麦克风选型:模组推荐搭配信噪比≥70dB、灵敏度为 - 27dB 的驻极体麦克风。这种麦克风成本低廉、供货稳定,配合模组内置的前置放大电路,完全能满足普通场景的拾音需求。
1.2 无冗余的引脚与电路设计
AR1106 采用标准 2.54mm 间距的 10 引脚设计,引脚定义清晰明了,无任何冗余功能:
表格
| 引脚 | 功能 | 说明 |
|---|---|---|
| 1 | GND | 电源地 |
| 2 | 5V | 电源输入 (5V) |
| 3 | MICL+ | 左麦克风正极 |
| 4 | MICL- | 左麦克风负极 |
| 5 | MICR+ | 右麦克风正极 |
| 6 | MICR- | 右麦克风负极 |
| 7 | PWM | SG90 舵机控制信号输出 |
| 8 | TX | 串口数据发送 (9600bps) |
| 9 | AOUT | 模拟角度输出 |
| 10 | NC | 预留 |
这种设计带来了三个显著优势:
集成难度极低:开发者无需进行复杂的硬件焊接和电路设计,直接插在面包板或标准 PCB 上即可使用。
成本可控:无冗余元件,BOM 成本降到了极致,非常适合对成本敏感的量产项目。
可靠性高:元件越少,故障点越少,长期运行的稳定性越高。
二、算法实现:面向场景的针对性优化
AR1106 的核心竞争力不仅在于硬件,更在于其针对普通应用场景深度优化的软件算法。它没有盲目追求实验室里的极限参数,而是着力解决真实环境中最常见的问题。
2.1 命令词触发式定位机制
这是 AR1106 与传统持续定位方案最大的区别,也是其抗干扰能力强的核心原因。
工作原理:模组平时处于低功耗待机状态,仅对预设的命令词进行检测。当检测到有效的命令词后,才会启动声源定位算法,计算出声源角度并输出结果。
抗干扰优势:这种机制从根本上避免了环境噪音、无关对话、背景音乐等干扰源导致的误触发。模组只会对用户明确发出的指令做出响应,在 60dB 以下的环境噪音中,误识别率几乎为零。
自定义能力:支持最多 10 个自定义命令词,厂商提供专业的定制服务。为保证识别精度,命令词需遵循以下规则:4-6 个中文字最佳,避免使用叠字、多音字和口语化词汇,发音清晰易分辨。
2.2 180°/10° 定位精度的实现
AR1106 实现了正面 180° 无盲区覆盖和10° 的定位精度,这一参数看似不高,但对于绝大多数普通场景来说已经完全足够。
算法优化:针对双麦阵列的局限性,模组对 180° 范围内的 TDOA 计算进行了专门优化,消除了边缘角度的识别盲区。同时,通过多次采样平均和卡尔曼滤波算法,有效降低了随机误差,保证了定位精度的稳定性。
场景适配:10° 的精度意味着模组可以清晰区分左右相邻的两个说话人,完全满足智能机器人转头、监控摄像头定向等应用需求。对于不需要毫米级定位的场景,过高的精度只会增加不必要的成本和计算量。
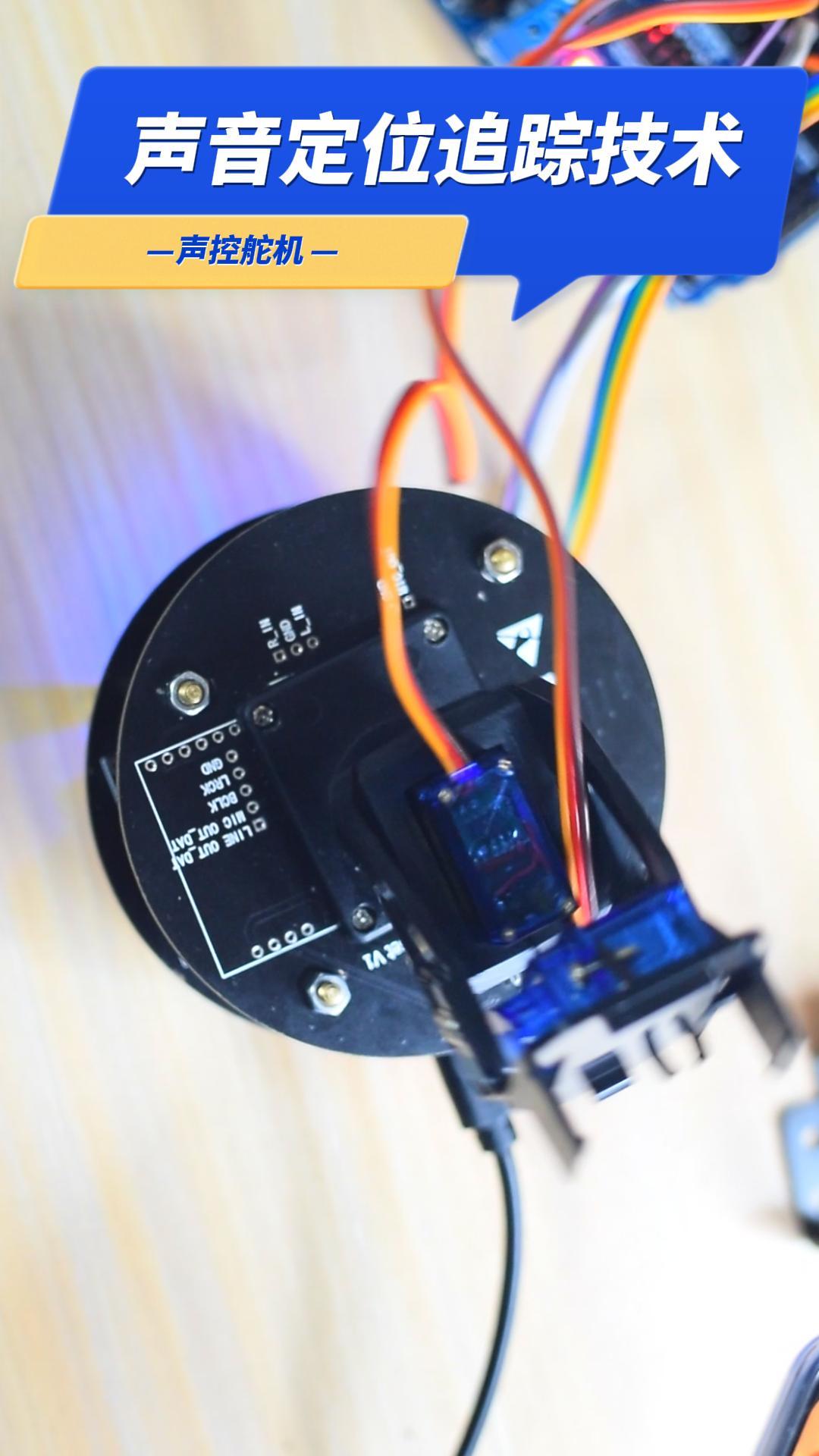
2.3 内置 SG90 舵机驱动算法
AR1106 内置了完整的 SG90 舵机驱动程序,这是其 “即插即用” 特性的关键体现。
信号自动转换:模组会自动将计算得到的声源角度 (0°-180°) 转换为 SG90 舵机对应的 PWM 控制信号,无需开发者进行任何数学转换。
平滑转向控制:算法加入了舵机转速控制和缓动效果,避免了舵机快速转向时的卡顿和抖动,使跟随过程更加流畅自然。
参数可调:开发者可以通过串口发送简单的指令,调整舵机的最大转角、转速和死区等参数,以适配不同的应用场景。
三、系统集成:降低门槛的工程实践
AR1106 的设计目标之一是让任何开发者都能在 30 分钟内跑通第一个声源定位项目。为了实现这一目标,模组在系统集成方面做了大量的优化工作。
3.1 标准串口输出协议
模组采用标准 UART 串口输出定位数据,波特率固定为 9600bps,数据格式为 8N1 (8 位数据位,1 位停止位,无校验位)。
输出格式:当检测到有效的命令词后,模组会通过 TX 引脚输出一个 16 进制的角度值。例如,90° 对应输出0x5A,100° 对应输出0x64,以此类推。
协议优势:这种极简的输出协议几乎不需要任何解析工作,开发者可以直接将读取到的数值作为角度使用,大大降低了软件开发的工作量。
兼容性:标准串口是所有嵌入式设备都支持的接口,模组可以直接与 51 单片机、STM32、Arduino、树莓派、PLC 等几乎所有主流主控设备对接。
3.2 即插即用的开发体验
AR1106 真正做到了 “开箱即用”,无需任何复杂的配置和调试:
按照引脚定义连接电源、舵机和主控设备的串口 RX 引脚。
上电后,模组自动进入待机状态。
说出预设的命令词 (默认 “你好,小智”),舵机会立即转向声源方向,同时串口输出对应的角度值。
对于新手开发者来说,不需要了解任何声学算法和舵机驱动的知识,只要会基本的串口通信,就能快速实现声源定位功能。对于专业开发者来说,这意味着可以将更多的精力放在产品的核心功能和用户体验上,而不是重复造轮子。
3.3 全场景适配的技术考量
AR1106 的设计充分考虑了不同应用场景的需求:
智能交互场景:低功耗待机模式适合电池供电的设备,快速响应和流畅的舵机跟随提供了自然的交互体验。
简易安防场景:抗干扰能力强,即使在有背景噪音的环境中也能准确捕捉异常声音,驱动摄像头转向声源方向。
工业监测场景:稳定可靠的性能适合长时间运行,可用于设备异响定位和异常声音报警。
创客教育场景:低成本、易上手的特点非常适合学生进行创意项目开发和毕设制作。
四、技术对比与局限性分析
为了更全面地了解 AR1106 的技术定位,我们将其与市面上常见的其他声源定位方案进行对比:
表格
| 方案类型 | 代表产品 | 麦克风数量 | 定位精度 | 拾音距离 | 开发难度 | 成本 | 适用场景 |
|---|---|---|---|---|---|---|---|
| 多麦阵列方案 | 科大讯飞 6 麦阵列 | 6 个 | 3°-5° | 3-10 米 | 高 | 高 (百元级) | 高端智能音箱、会议系统 |
| 纯软件算法方案 | WebRTC | 2 个及以上 | 5°-15° | 1-3 米 | 极高 | 低 (仅软件) | 高性能嵌入式设备、PC |
| 双麦模组方案 | AR1106 | 2 个 | 10° | 5 米 | 极低 | 低 (十元级) | 普通智能设备、简易安防、创客项目 |
AR1106 的局限性:
定位精度有限 (10°),不适合需要高精度定位的场景。
拾音距离最大 5 米,超过后灵敏度和精度会显著下降。
仅支持命令词触发式定位,不支持持续的声源追踪。
内置驱动仅支持 SG90 舵机,如需使用其他型号舵机需要额外开发。
五、总结与展望
AR1106 声源定位模组的成功,在于它深刻理解了绝大多数普通应用场景的真实需求。它没有追求华而不实的参数,而是将 “精准定位、智能抗干扰、便捷集成、高性价比” 这些最基础、最核心的需求做到了极致。
从工程哲学的角度来看,AR1106 告诉我们:好的技术产品不是功能越多越好,而是在合适的成本下,完美解决目标用户的核心痛点。对于广大中小开发者、初创公司和创客来说,AR1106 提供了一个零门槛、低成本的声源定位解决方案,让他们能够快速将创意转化为产品。
未来,随着智能交互技术的进一步普及,声源定位技术将会向更低成本、更高集成度、更强抗干扰能力的方向发展。而 AR1106 所代表的 “极简实用” 的设计理念,将会在更多的技术产品中得到体现。
如果你正在开发一款需要声源定位功能的智能设备,并且对成本和开发周期比较敏感,那么 AR1106 绝对是一个值得考虑的选择。它可能不是性能最强的方案,但一定是最适合你的方案。
审核编辑 黄宇
-
嵌入式
+关注
关注
5212文章
20762浏览量
338626 -
机器人
+关注
关注
214文章
31633浏览量
224410 -
声源定位
+关注
关注
7文章
24浏览量
13920
发布评论请先 登录
硬件工程师必看:如何用3颗麦克风实现360°六向声源定位?

AR1106 声源定位模组|精准声源追踪・极简集成方案・智能交互核心部件

AR1105声源定位模组规格书
AR1106 声源定位模组 —— 智能安防监控 “听觉大脑”,让安全看得见、听得准、跟得上

AR1105 六向声源定位模组 —— 为智能机器人赋予360° 全向听觉,实现闻声而动、自主交互、智能巡检

矿山智能化升级|AR1106 声源定位模组:井下听声辨位,守护安全与生产

AR1106 声源定位模组 —— 精准声源追踪,赋能智能交互与场景化感知

3 麦实现 6 向精准声源定位!AR1105 模组功能、场景与开发全解析




AR1105模组如何以极简架构实现精准六向音源定位
AR1105 声源定位模组:为设备赋予精准 “听觉方位感” 的技术利器



评论