 伺服驱动器第二编码器的配置方法
伺服驱动器第二编码器的配置方法

配置伺服驱动器的第二编码器(通常是安装在负载侧的光栅尺或编码器),主要目的是实现全闭环控制。这样,系统以电机侧编码器进行速度控制,以负载侧编码器进行位置控制,从而消除机械传动误差。

由于不同品牌驱动器的软件和参数结构差异较大,配置方法主要分为以下两种典型情况。这里以应用广泛的西门子S120为例,详细说明软件中的配置步骤。
一、 西门子S120配置步骤
在SINAMICS S120驱动器中,第二编码器的配置主要在STARTER或SCOUT软件中通过驱动数据组来完成。
基本配置 (通过向导)
在项目树中双击驱动对象(如SERVO_02),点击右侧的"Configure DDS"按钮,打开驱动配置向导。
按照向导提示,依次配置好电源和电机。在编码器配置步骤,你会看到两个选项:速度控制编码器Encoder_1和第二编码器Encoder_2。
勾选Encoder_2并选择正确的类型(如增量式、绝对值或SSI等)。最关键的一步是,在后续的位置控制选项中,选择Encoder_2作为位置反馈来源。
配置机械参数
向导中会要求输入负载侧的机械参数。你需要正确填写电机转一圈对应的负载位移(如丝杠螺距)、齿轮比等,确保第二编码器的反馈值以实际的用户单位(如mm、inch)显示。
调整拓扑结构
配置完成后,需要确保软件中的Topology(拓扑结构)与实际物理接线完全一致。在拓扑编辑器中,你可以通过拖拽的方式,将第二编码器分配到CU(控制单元)或电机模块上正确的DRIVE-CLiQ接口。
分配控制字 (DDS切换)
如果需要通过PLC信号动态切换使用第一或第二编码器,需要设置多个驱动数据组。通常,你需要创建DDS0(使用编码器1)和DDS1(使用编码器2),然后通过一个数字量输入信号来切换这两个数据组。
二、 其他品牌通用配置思路
如果你使用的是其他品牌的驱动器,配置逻辑通常也遵循以下通用步骤:
硬件连接
查阅驱动器手册,将第二编码器的信号线(通常是A+, A-, B+, B-等差分信号)连接到指定的第二编码器接口(如CN4)。
注意线缆需使用双绞屏蔽线,并确保接地良好。
参数设置
启用功能:找到并设置参数,将控制模式切换为"全闭环"或"双环控制"。
设置分辨率:输入第二编码器的每转脉冲数或栅距。
设置方向:如果实际运行中发现电机飞车或震荡,通常需要修改第二编码器的计数方向。
调试与验证
通过软件监控功能,分别观察电机编码器和第二编码器的反馈值。在手动点动时,两者的读数变化趋势应该一致,且第二编码器的数值不应出现剧烈跳变。
三、 关键注意事项
线缆长度与电源:外接的第二编码器线缆不宜过长,一般建议不超过10米。如果编码器功耗较大,务必使用外部5V电源供电,而不是直接从驱动器取电,以免造成电压不稳。
零点回零:在全闭环模式下,回零操作通常是基于第二编码器的零点信号进行的,这一点在配置参数时需要注意。
如果你需要了解特定型号(如台达、松下、汇川等)的具体参数号,关注我,一起学习。
审核编辑 黄宇
-
编码器
+关注
关注
45文章
4009浏览量
143306 -
伺服驱动器
+关注
关注
22文章
568浏览量
33628
发布评论请先 登录
三菱伺服电机的编码器引脚的定义

伺服电机编码器14根线、5根线、4根线的区别
伺服电机正余弦编码器的相位对齐方式

磁铁在编码器中的作用与应用

伺服驱动器增益参数的调整方法
磁编码器接口定义及标准接线方法
面向高速伺服的磁感应编码器芯片信号处理技术
伺服驱动器最常见的故障及解决方法

舵机伺服编码器
伺服增量编码器:工业自动化的精密之眼
MT6816磁编码器的伺服系统小型化与高性价比设计

什么是伺服电机编码器?作用/关键技术/选型等一起看看吧!

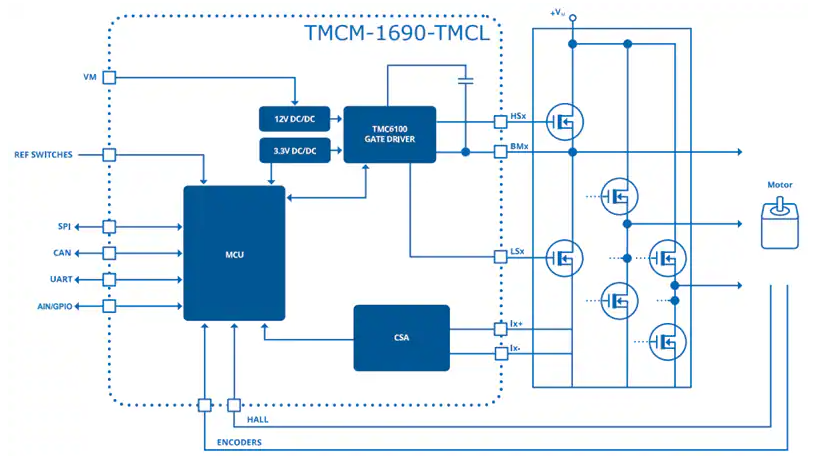
Analog Devices Inc. TMCM-1690-TMCL伺服控制器栅极驱动器模块数据手册
伺服电机编码器与转子磁极相位对齐方法
东元伺服驱动器报警代码




评论