 基于极海APM32F425 MCU的机器人智能关节伺服参考方案
基于极海APM32F425 MCU的机器人智能关节伺服参考方案

关节伺服是支撑智能制造、柔性生产与先进机器人产业的关键技术之一。随着全球制造业向智能化、轻量化、高精度转型,市场对关节伺服的动态响应速度、控制精度、功率密度与集成化程度提出了更高要求。
目前主流关节伺服多采用 “MCU/DSP+FPGA+功率驱动”多芯片异构架构,分别承担运动规划、实时电流环控制与功率变换等功能,虽然能实现功能拆分,但存在诸多技术瓶颈:
多芯片高速数据交互与时钟同步难度大,控制延迟显著增加,影响系统动态响应与抗扰动能力;
软硬件耦合度高,系统设计、调试与验证流程复杂,将增加产品选型、开发、生产与全生命周期维护成本;
分立器件数量多,PCB 布局与电磁兼容设计难度大,制约关节伺服小型化与一体化集成。
针对此行业痛点,极海推出了机器人关节伺服参考方案,以高性能单芯片架构实现技术突破,兼具高动态响应、高控制精度、高功率密度、高可靠性四大核心优势,可适配工业机器人、协作机器人、人形机器人关节、AGV/AMR 执行机构及高端数控装备等场景。

极海机器人智能关节伺服方案板
极海机器人关节伺服参考方案介绍
单芯片主控+专用驱动,全维度性能升级
本方案采用极海APM32F425工业级高性能MCU搭配GHD3440电机栅极驱动器,依托单芯片全集成主控架构与专用功率驱动协同发力,构建从控制运算、信号处理、驱动放大到功率输出的完整闭环链路。
方案深度整合主控、位置检测(支持双磁编码器)、FOC 算法引擎、高精度磁编码解码单元、电流/电压采样、PWM生成、CAN通信、功率驱动与安全保护等全功能模块,同时兼顾性能、集成度与性价比,完美适配关节伺服模组小型化、轻量化、高精度部署,满足规模化量产的低成本与稳定性需求。

极海机器人关节伺服方案框图
方案优势
架构革新、精准控制:采用通用伺服设计架构,支持位置、速度、力矩等控制模式;内置双磁编码器及校准算法,有效消除位置检测误差,优化系统运行稳定性;
主控+驱动协同提效:APM32F425(主频240MHz,20-24μs中断响应)高算力,可大幅提升电流环控制频率;GHD3440匹配主控PWM输出信号,显著缩短系统响应时间,满足机器人关节高速精准运动控制需求;
高速通信、组网便捷:支持1Mbps的CAN通讯,轻松实现多台设备组网运行,兼容多数关节伺服的通信需求;
高效调试、快速落地:支持PC上位机调试,可执行参数修改与保存,三环PID调试,JOG试运行,示波器等功能,有助于工程师快速上手、高效开发;
多重保护、运行可靠:具备过压、欠压、过流、过热、过载、超速、位置偏差、编码器错误等全维度保护功能,有效规避工况风险,提升系统稳定性;
小型集成化:APM32F425(QFN48封装)、GHD3440(QFN24封装)均采用小型化封装,大幅减少外围元器件数量,适配小尺寸PCB布局需求,契合一体化关节伺服模组的紧凑型、轻量化设计需求。

方案转速波形
极海机器人关节伺服参考方案在10rpm以及50rpm下的转速波形,基本可以保证当前转速下的稳定性。

APM32F425高性能拓展型MCU产品介绍
APM32F425搭载Cortex-M4F内核,主频240MHz,内置1024KB Flash、192+4KB SRAM,支持FPU浮点运算与DSP指令集,可为机器人关节复杂柔顺控制、高速运算提供强劲算力;集成3个4MSPS采样率的12位ADC,支持硬件过采样,有效保障关节精准位置与力矩反馈;丰富的通信外设资源全面覆盖工业接口,满足关节伺服多场景高速互联与稳定通信。

了解更多APM32F425高性能拓展型MCU产品详情
GHD3440电机栅极驱动器产品介绍
GHD3440200V双N沟道三相中压高速栅极驱动IC,在机器人关节伺服系统中,位于功率级(三相逆变桥)与主控芯片之间,发挥信号放大与电平转换、功率开关驱动、安全保护等功能。该芯片电源工作范围5.5V~18V,内置250ns死区时间,集成输入输出下拉电阻,具备强驱动能力与高速响应等特性,可高效放大伺服控制信号,显著提升机器人关节驱动效率与动态响应速度。

了解更多GHD3440电机栅极驱动器产品详情
极海机器人智能关节伺服参考方案,以APM32F425主控强算力实现复杂柔顺控制与高速闭环运算,搭配GHD3440高速驱动IC提升关节动态响应与驱动效率,精准满足伺服系统高精度、快响应、小尺寸、低成本的核心需求,可为终端厂商提供一站式、高可靠的国产化机器人关节伺服解决方案。
目前,极海已正式推出机器人智能关节伺服参考方案,配套方案规格书、原理图、软件工程说明、上位机控制概要等技术文档资料。
-
mcu
+关注
关注
147文章
19110浏览量
403238 -
驱动器
+关注
关注
54文章
9111浏览量
156437 -
机器人
+关注
关注
213文章
31391浏览量
223545 -
极海半导体
+关注
关注
0文章
223浏览量
4825
原文标题:柔顺驱动、精准响应 | 极海APM32F425机器人智能关节伺服参考方案
文章出处:【微信号:geehysemi,微信公众号:Geehy极海半导体】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
极海半导体发布APM32F425/427系列高性能MCU 运算、ADC、Flash控制器与通信接口四大维度革新
工业机器人的末端关节旋转该精确控制?
微型机器人关节使用超声波电机的优势

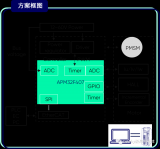
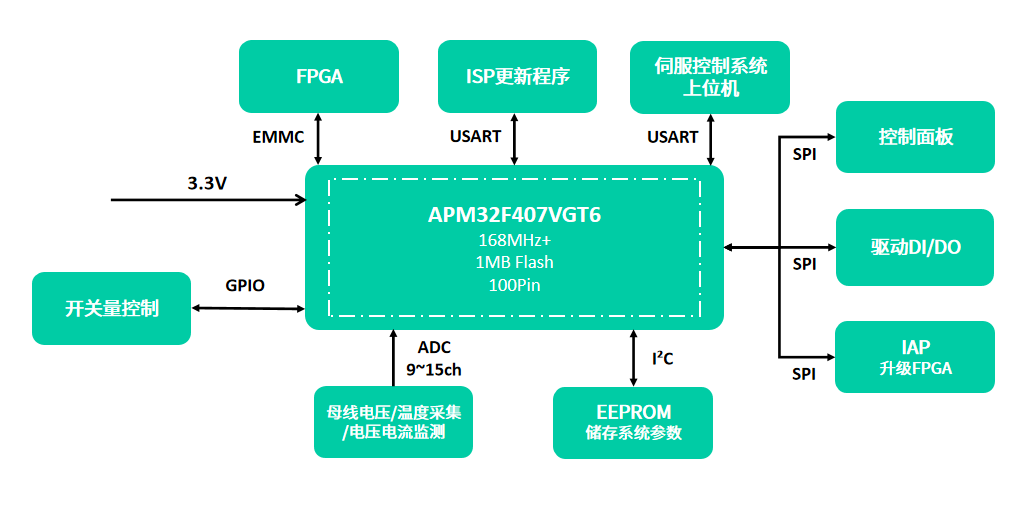
极海APM32F407 MCU低压伺服驱动器应用方案
基于STSPIN32G4轻量化协作机器人关节伺服驱动解决方案

极海APM32F072xBT7硬件兼容ST电动车应用方案mcu
赋能高精度运动控制!极海基于APM32F425/427系列总线型低压伺服方案为机器人、工业自动化注入新动力

极海APM32F425/427系列MCU荣获2025年度最能打的中国芯片奖




评论