 RK3588串口RS485自动收发控制:内核驱动层改造实战
RK3588串口RS485自动收发控制:内核驱动层改造实战

【前言】
在工业通信场景中,RS485因其远距离传输、抗干扰能力强、支持多节点组网等特性,成为工控领域的首选通信方式。然而,与RS232的全双工通信不同,RS485采用半双工模式——同一时刻只能发送或接收。这就要求我们必须精确控制收发状态切换:
发送数据前:将控制脚置为高电平,使能发送器
数据发送完成后:将控制脚置为低电平,切换为接收模式
瑞芯微RK系列芯片(以眺望电子RK3588核心板为例)的UART控制器并未内置RS485自动控制功能,本文介绍一种内核级驱动改造方案,通过GPIO实现可靠的收发控制。
一、硬件连接原理
RS485收发器通常有以下引脚:
| 引脚 | 功能 | 控制方式 |
| RO | 接收输出 | 连接UART RX |
| DI | 发送输入 | 连接UART TX |
| RE | 接收使能 | 低电平有效 |
| DE | 发送使能 | 高电平有效 |
| A/B | 差分信号线 | 总线接口 |
如下图所示,将RE和DE引脚短接,通过单个GPIO统一控制,实现收发模式切换:

GPIO输出高电平 → DE=1, RE=1 → 发送模式
GPIO输出低电平 → DE=0, RE=0 → 接收模式
瑞芯微的内核源码没有⾃带的配置接⼝,需要我们修改如下驱动代码。
二、设备树配置
在设备树中为UART节点添加 rts_gpio 属性:
--- a/arch/arm64/boot/dts/rockchip/talowe-rk3588-common.dtsi+++ b/arch/arm64/boot/dts/rockchip/talowe-rk3588-common.dtsi@@ -1057,13 +1057,14 @@&uart6 {&uart9 {pinctrl-names = "default";pinctrl-0 = <&uart9m2_xfer>;- // rts-gpio = <&gpio3 RK_PC4 GPIO_ACTIVE_HIGH>;+ rts_gpio = <&gpio3 RK_PC4 GPIO_ACTIVE_LOW>;status = "okay";};&uart0 {pinctrl-names = "default";pinctrl-0 = <&uart0m2_xfer>;+ rts_gpio = <&gpio3 RK_PC5 GPIO_ACTIVE_LOW>;status = "okay";};
重要提示:属性名必须是 rts_gpio(单数形式),不能写成 rts-gpios(复数形式)。若使用复数形式,串口驱动会触发 mctrl_gpio 机制,导致本文方案失效。

三、驱动层改造详解
diff --git a/drivers/tty/serial/8250/8250_core.c b/drivers/tty/serial/8250/8250_core.cindex 2f7553cea..3cb98ae0d 100644--- a/drivers/tty/serial/8250/8250_core.c+++ b/drivers/tty/serial/8250/8250_core.c@@ -1024,6 +1024,8 @@int serial8250_register_8250_port(const struct uart_8250_port *up)#ifdefCONFIG_ARCH_ROCKCHIPuart->port.line = up->port.line;#endif+ if (up->rts_gpios > 0)+ uart->rts_gpios = up->rts_gpios;/* Take tx_loadsz from fifosize if it wasn't set separately */if (uart->port.fifosize && !uart->tx_loadsz)uart->tx_loadsz = uart->port.fifosize;diff --git a/drivers/tty/serial/8250/8250_dw.c b/drivers/tty/serial/8250/8250_dw.cindex 816c0122c..d37909cd3 100644--- a/drivers/tty/serial/8250/8250_dw.c+++ b/drivers/tty/serial/8250/8250_dw.c@@ -35,7 +35,8 @@#else#include"8250_dwlib.h"#endif-+#include+#include/* Offsets for the DesignWare specific registers */#defineDW_UART_USR 0x1f /* UART Status Register */#defineDW_UART_DMASA 0xa8 /* DMA Software Ack */@@ -573,7 +574,7 @@static int dw8250_probe(struct platform_device *pdev)int irq;int err;u32 val;+ int rts_gpios;regs = platform_get_resource(pdev, IORESOURCE_MEM, 0);if (!regs)return dev_err_probe(dev, -EINVAL, "no registers defined\n");@@ -610,7 +611,16 @@static int dw8250_probe(struct platform_device *pdev)#ifdefCONFIG_ARCH_ROCKCHIPdata->irq = irq;#endif-+ rts_gpios = of_get_named_gpio(dev->of_node,"rts_gpio", 0);+ up->rts_gpios = rts_gpios;+ if (up->rts_gpios > 0)+ {+ printk("rts_gpios=%d\n", up->rts_gpios);+ gpio_direction_output(up->rts_gpios, 0);+ gpio_set_value(up->rts_gpios, 0);+ }++data->uart_16550_compatible = device_property_read_bool(dev,"snps,uart-16550-compatible");diff --git a/drivers/tty/serial/8250/8250_port.c b/drivers/tty/serial/8250/8250_port.cindex b7a3634c6..e7c49272a 100644--- a/drivers/tty/serial/8250/8250_port.c+++ b/drivers/tty/serial/8250/8250_port.c@@ -38,6 +38,8 @@#include"8250.h"+#include/* Nuvoton NPCM timeout register */#defineUART_NPCM_TOR 7#defineUART_NPCM_TOIE BIT(7) /* Timeout Interrupt Enable */@@ -1825,7 +1827,7 @@void serial8250_tx_chars(struct uart_8250_port *up)struct uart_port *port = &up->port;struct circ_buf *xmit = &port->state->xmit;int count;-+ int lsr,cnt;if (port->x_char) {uart_xchar_out(port, UART_TX);return;@@ -1838,7 +1840,11 @@void serial8250_tx_chars(struct uart_8250_port *up)__stop_tx(up);return;}+ if (up->rts_gpios > 0 )+ {+ gpio_set_value(up->rts_gpios, 1);+ }count = up->tx_loadsz;do {serial_out(up, UART_TX, xmit->buf[xmit->tail]);@@ -1878,7 +1884,19 @@void serial8250_tx_chars(struct uart_8250_port *up)if (uart_circ_empty(xmit) && !(up->capabilities & UART_CAP_RPM))+ {__stop_tx(up);+ if (up->rts_gpios > 0 )+ {+ for (cnt = 0; cnt < 200; cnt++)+ {+ mdelay(3);+ lsr = serial_in(up, UART_LSR);+ if(UART_LSR_TEMT == (lsr & UART_LSR_TEMT))+ {+ break;+ }+ }+ gpio_set_value(up->rts_gpios, 0);+ }+ }}EXPORT_SYMBOL_GPL(serial8250_tx_chars);diff --git a/include/linux/serial_8250.h b/include/linux/serial_8250.hindex 46d76b035..e088fe6ba 100644--- a/include/linux/serial_8250.h+++ b/include/linux/serial_8250.h@@ -141,6 +141,7 @@struct uart_8250_port {/* Serial port overrun backoff */struct delayed_work overrun_backoff;u32 overrun_backoff_time_ms;+ int rts_gpios;};static inline struct uart_8250_port *up_to_u8250p(struct uart_port *up)diff --git a/include/uapi/linux/serial.h b/include/uapi/linux/serial.hindex cea06924b..9f3435e98 100644--- a/include/uapi/linux/serial.h+++ b/include/uapi/linux/serial.h@@ -134,7 +134,7 @@struct serial_rs485 {__u32 delay_rts_before_send; /* Delay before send (milliseconds) */__u32 delay_rts_after_send; /* Delay after send (milliseconds) */-+/* The fields below are defined by flags */union {__u32 padding[5]; /* Memory is cheap, new structs are a pain */
3.1核心数据结构扩展
修改 include/linux/serial_8250.h,在 uart_8250_port 结构体中新增GPIO字段:
structuart_8250_port {// ... 原有字段/* Serial port overrun backoff */structdelayed_work overrun_backoff;u32 overrun_backoff_time_ms;intrts_gpios; /* 新增:RS485方向控制GPIO */};
3.2平台驱动初始化
修改 drivers/tty/serial/8250/8250_dw.c,在probe函数中解析设备树GPIO:
#include#includestaticintdw8250_probe(structplatform_device *pdev){// ... 原有代码intrts_gpios;// 从设备树获取GPIOrts_gpios =of_get_named_gpio(dev->of_node,"rts_gpio",0);up->rts_gpios = rts_gpios;if(up->rts_gpios >0) {printk("rts_gpios=%d\n", up->rts_gpios);gpio_direction_output(up->rts_gpios,0);gpio_set_value(up->rts_gpios,0); // 默认接收模式}// ... 后续代码}
3.3注册时传递GPIO信息
修改 drivers/tty/serial/8250/8250_core.c:
intserial8250_register_8250_port(conststructuart_8250_port *up){// ... 原有代码#ifdefCONFIG_ARCH_ROCKCHIPuart->port.line = up->port.line;#endif// 传递GPIO信息到新实例if(up->rts_gpios >0)uart->rts_gpios = up->rts_gpios;// ... 后续代码}
3.4发送时序控制(核心逻辑)
修改 drivers/tty/serial/8250/8250_port.c 中的 serial8250_tx_chars 函数:
#includevoidserial8250_tx_chars(structuart_8250_port *up){structuart_port*port = &up->port;structcirc_buf*xmit = &port->state->xmit;intcount;intlsr, cnt;// ... 原有检查代码/* ===== 发送前:置高GPIO,进入发送模式 ===== */if(up->rts_gpios >0) {gpio_set_value(up->rts_gpios,1);}count = up->tx_loadsz;do{serial_out(up, UART_TX, xmit->buf[xmit->tail]);xmit->tail = (xmit->tail +1) & (UART_XMIT_SIZE -1);port->icount.tx++;if(uart_circ_empty(xmit))break;}while(--count >0);// ... 原有发送逻辑/* ===== 发送完成后:等待FIFO清空,再置低GPIO ===== */if(uart_circ_empty(xmit) && !(up->capabilities & UART_CAP_RPM)) {__stop_tx(up);if(up->rts_gpios >0) {// 轮询等待发送完成(最多600ms)for(cnt =0; cnt < 200; cnt++) {mdelay(3);lsr = serial_in(up, UART_LSR);if (UART_LSR_TEMT == (lsr & UART_LSR_TEMT))break;}gpio_set_value(up->rts_gpios,0); // 切换回接收模式}}}
四、关键设计要点
4.1为什么要在8250_core.c中传递GPIO?
因为 rts_gpios 定义在 struct uart_8250_port 结构体中,而发送函数 serial8250_tx_chars 操作的是该结构体的实例。如果不通过 serial8250_register_8250_port 函数传递,在 8250_port.c 中引用的 up->rts_gpios 将为0,导致GPIO控制失效。
4.2发送完成检测策略
方案采用轮询UART_LSR寄存器的方式检测发送完成:
// UART_LSR_TEMT位为1表示发送FIFO和移位寄存器均为空if(UART_LSR_TEMT == (lsr & UART_LSR_TEMT))break;
每次轮询间隔3ms
最大轮询200次(总计600ms超时)
适用于最高波特率115200bps下的典型帧传输
4.3多串口支持
本方案支持对多个UART同时进行RS485改造,只需在设备树中为各串口配置不同的GPIO即可。每个串口的GPIO状态独立维护,互不干扰。
4.4注意事项
设备树属性名:使用 rts_gpio(单数),勿用 rts-gpios(复数)
GPIO有效电平:根据RS485收发器规格选择 GPIO_ACTIVE_LOW 或 GPIO_ACTIVE_HIGH
超时设置:若波特率较低或数据量较大,需适当延长轮询超时时间
五、总结
本文介绍的驱动层改造方案,通过设备树配置+内核驱动修改,实现了RK3588 RS485的自动控制。相比用户空间轮询方案,具有以下优势:
时序精确:在数据发送的最开始置高GPIO,在所有数据彻底发送完成后置低,无用户态切换延迟
应用透明:应用层无需任何修改,直接按普通串口使用
资源节省:无需外置RS485协议芯片,降低BOM成本
内核标准:基于8250串口驱动框架,兼容性好,易于维护
相关代码补丁可在眺望电子提供的SDK上应用,适用于眺望电子RK3568、RK3588、RK3576等RK全系列芯片平台。
广州眺望电子科技有限公司专注于嵌入式处理器模组的研发与应用,提供从硬件设计到驱动开发,系统解决方案的全流程技术支持。欢迎关注我们的公众号,获取更多嵌入式项目开发实战经验。
-
RS485
+关注
关注
40文章
1369浏览量
86479 -
串口
+关注
关注
15文章
1631浏览量
83722 -
无线收发控制
+关注
关注
0文章
2浏览量
749 -
RK3588
+关注
关注
8文章
614浏览量
7803
发布评论请先 登录
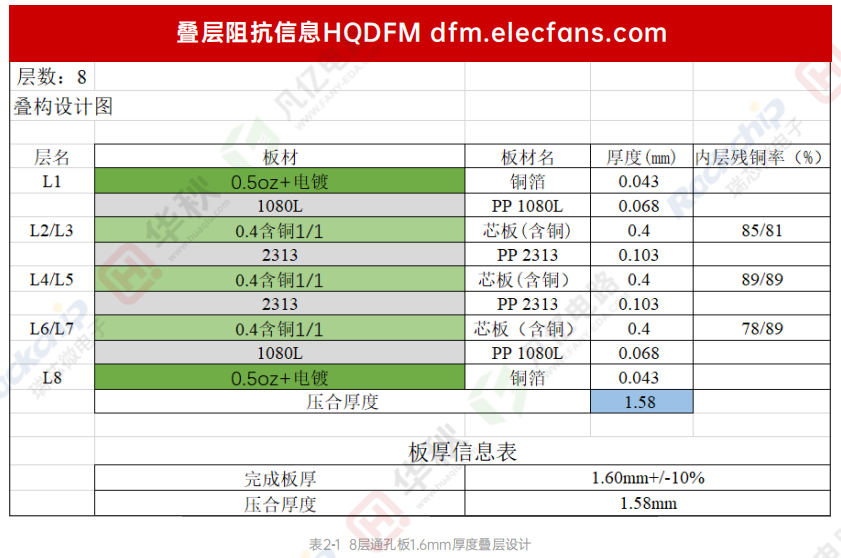
RK3588 PCB推荐叠层及阻抗设计
HaaS100通过RS485串口控制380V电机
RS485 232串口通信数据解析
(RS485 232串口通信数据解析实用干货(1)


工业RS485串口网关实现485接口数据采集




评论