 用睿擎派实现 LVGL 可视化 EtherCAT 电机控制,触屏操控伺服电机就这么简单|技术集结
用睿擎派实现 LVGL 可视化 EtherCAT 电机控制,触屏操控伺服电机就这么简单|技术集结

在工业自动化领域,运动控制系统往往面临两大痛点:实时性要求极高,同时又需要直观的人机交互界面。传统方案要么牺牲实时性换取界面体验,要么用昂贵的专用 HMI 设备来弥补。
今天分享一个基于睿擎派 RC3506的完整方案——用LVGL 图形界面 + EtherCAT 总线,在一块开发板上同时搞定可视化操控和微秒级实时控制。(文末附完整工程源码及使用指南扫码领取)
效果先看
触摸屏上拖动滑块 → 伺服电机精准转到指定位置;点击 Run/Stop 按钮 → 电机启停;切换 Direct/Reverse → 方向立即响应。屏幕上的位置表盘实时显示期望位置和当前位置,一目了然。

7寸触控屏上的 LVGL 控制界面:位置表盘 + 滑块 + 运行控制按钮
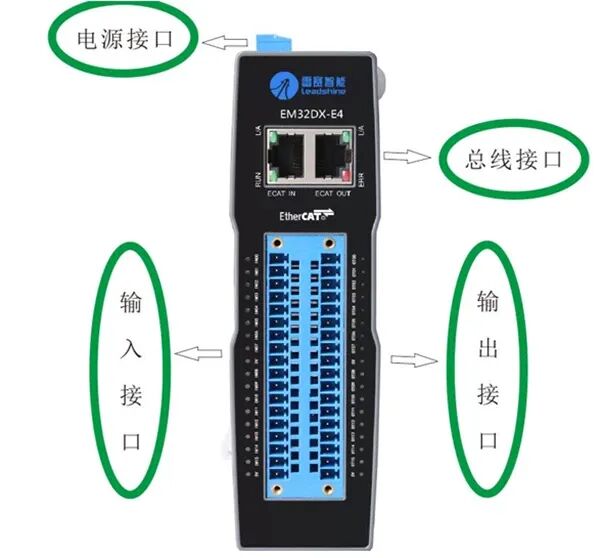
与此同时,EtherCAT 总线上挂载的远程 IO 模块同步输出流水灯效果,展示多从站并行控制能力。
为什么选 EtherCAT?
EtherCAT(Ethernet for Control Automation Technology)是目前工业现场总线中实时性最强的协议之一:
●通信周期最低 1ms,支持分布式时钟(DC)同步,精度达微秒级
●"飞速处理"机制:数据帧在经过从站时直接被读写,无需等待,延迟极低
●菊花链拓扑:一根网线串联多个从站,布线简单,最多支持 65535 个节点
●使用标准以太网硬件,无需专用芯片,成本可控
睿擎派 RC3506 内置 EtherCAT 主站协议栈,配合 RT-Thread 实时操作系统,可以稳定跑出1ms 控制周期。
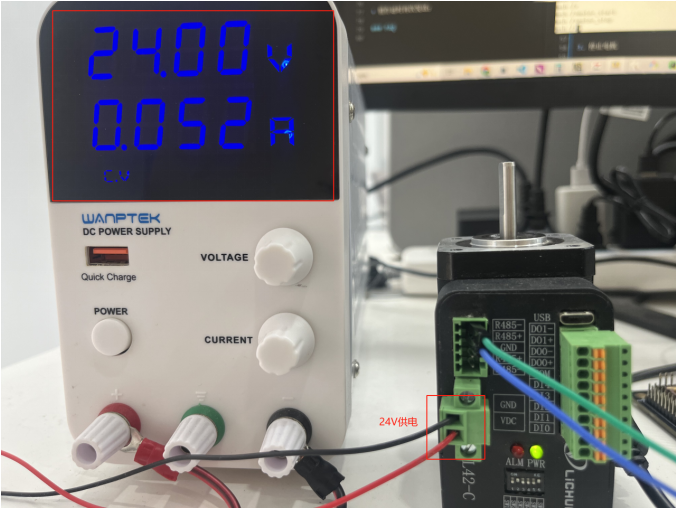
硬件准备

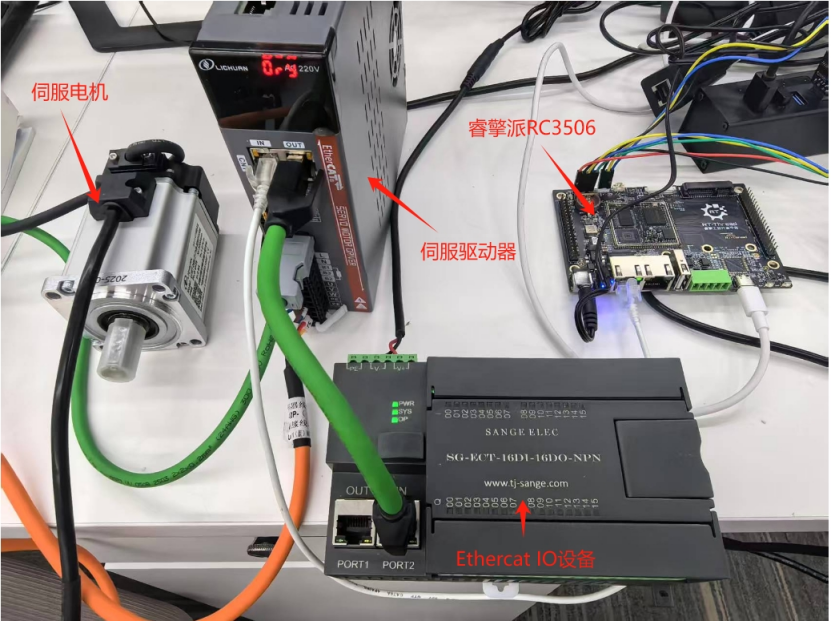
连接方式:
睿擎派 ETH0 ──网线──> 伺服驱动器 IN 口
伺服驱动器 OUT 口 ──网线──> 远程 IO IN 口
睿擎派 MIPI 接口 ──排线──> 7 寸触控屏

EtherCAT 主从站硬件连接示意:睿擎派 → 伺服驱动器 → 远程 IO
软件架构
整个示例的软件结构非常清晰,main 函数只做两件事:
intmain(void)
{
lvgl_thread_init();// 启动 LVGL 图形线程
ethercat_domain_init();// 启动 EtherCAT 控制线程
return0;
}
两个线程并行运行,互不干扰:
●LVGL 线程:负责渲染界面、响应触摸事件,将用户操作写入共享变量
●EtherCAT 线程:以 1ms 为周期读取共享变量,通过 PDO 下发目标位置给伺服驱动器
EtherCAT 主站初始化流程
EtherCAT 的状态机切换是标准流程,睿擎平台封装得很简洁:
// 1. 初始化主站服务
ecat_service_init();
// 2. 自动扫描总线拓扑,发现所有从站
ecat_master_init(&csp_master);
// 2. 自动扫描总线拓扑,发现所有从站
slave_counts=ecat_slavecount(&csp_master);;
// 3. 配置分布式时钟(DC)同步
slave_cia402_config.dc_assign_activate=0x300;
slave_cia402_config.dc_sync[0].cycle_time=csp_master.main_cycletime_us*1000;
slave_cia402_config.dc_sync[0].shift_time=500000;
slave_cia402_config.dc_sync[1].cycle_time=0;
slave_cia402_config.dc_sync[1].shift_time=0;
// 4. 配置 PDO 映射(目标位置、控制字、状态字等)
slave_cia402_config.sync=slave_syncs;
slave_cia402_config.sync_count=sizeof(slave_syncs)/sizeof(ec_sync_info_t);
ecat_slave_config(&csp_master,0,&slave_cia402_config);
// 5. 启动主站自动完成状态机切换:INIT → PRE-OP → SAFE-OP → OPERATIONAL
ecat_master_start(&csp_master);
state=EC_STATE_OPERATIONAL;
ecat_check_state(&csp_master,0,&state,20000000*3);
进入 OPERATIONAL 状态后,主站开始周期性收发过程数据(PDO),电机控制正式开始。
CSP 模式:周期同步位置控制
本示例使用CSP(Cyclic Synchronous Position)模式,这是伺服控制中最常用的模式之一:
主站每个控制周期向伺服驱动器发送目标位置,驱动器内部完成位置环、速度环、电流环的闭环控制。主站只需关心"去哪里",不需要关心"怎么去"。
核心控制循环如下:
while(1)
{
servo_switch_op(rmap,tmap);// 进行伺服状态机切换
if(rmap->control_word==7)
{
rmap->mode_byte=0x8;
rmap->dest_pos=tmap->cur_pos;// 同步当前位置
}
if(rmap->control_word==0xf)
{
if(motor_target_pos_last!=motor_target_pos)
{
/* 获取当前位置 */
motor_current_pos=PULSE_TO_ANGLE(tmap->cur_pos);
if(abs(motor_current_pos-motor_target_pos)<=0)
{
rmap->dest_pos=tmap->cur_pos;
if(abs(tmap->cur_pos-rmap->dest_pos)<=10)
{
/* 微调目标位置 */
motor_target_pos_last=motor_target_pos;
}
gotostop;
}
if(servo_dir)
{
rmap->dest_pos-=motor_step;// 根据方向步进目标位置
}
else
{
rmap->dest_pos+=motor_step;// 根据方向步进目标位
}
}
}
stop:
rt_thread_delay(5);
}
servo_run、motor_target_pos、servo_dir 这些变量由 LVGL 界面线程写入,EtherCAT 线程读取,实现了界面与控制的解耦。
PDO 映射:主站与从站的数据约定
PDO(Process Data Object)定义了每个控制周期主站和从站交换哪些数据:
主站 → 从站(RPDO,输出):
对象字典 | 含义 |
0x6060 | 工作模式(设为 0x08 = CSP 模式) |
0x6040 | 控制字(使能/停止/故障复位) |
0x607A | 目标位置 |
0x60FF | 目标速度 |
0x6071 | 目标转矩 |
从站 → 主站(TPDO,输入):
对象字典 | 含义 |
0x603F | 错误码 |
0x6041 | 状态字(当前状态) |
0x6064 | 实际位置(反馈给 LVGL 显示) |
0x606C | 实际速度 |
0x6077 | 实际转矩 |
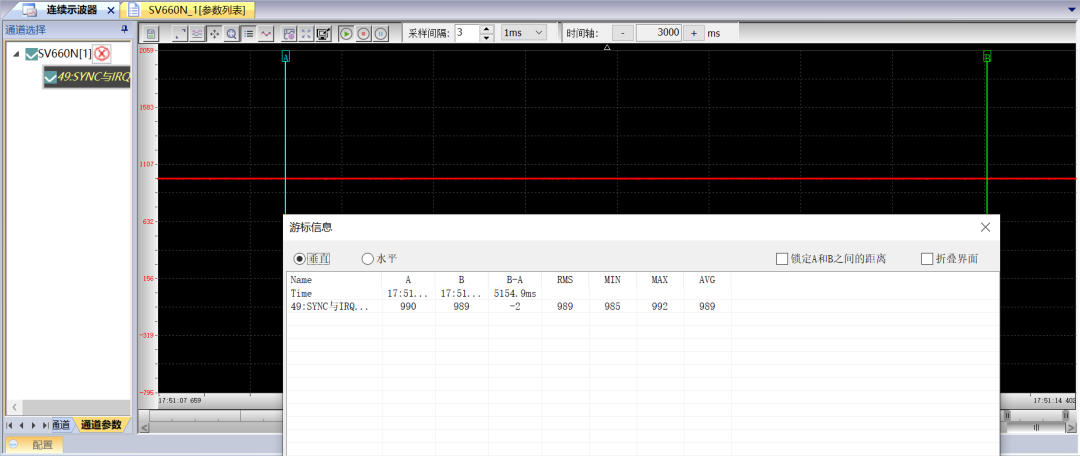
实际位置 0x6064 会实时回传给 LVGL 界面,驱动表盘指针更新,让操作者直观看到电机当前位置。
多从站扩展:双电机 + IO 并行控制
睿擎平台同样支持一拖多的 EtherCAT 拓扑,只需在初始化时扫描从站数量,循环处理每个从站的 PDO 即可:

双电机 + 远程 IO 模块菊花链连接拓扑
slave_counts=ecat_slavecount(&csp_master);
while(1){
for(size_tslave=0;slave<slave_counts;slave++)
{
rmap=(structrpdo_csp*)(info[slave].outputs);
tmap=(structtpdo_csp*)(info[slave].inputs);
if(info[slave].vendor_id!=0xee000002)
{// 伺服电机控制
servo_switch_op(rmap,tmap);
if(rmap->control_word==7)
{
rmap->dest_pos=tmap->cur_pos;
rmap->mode_byte=0x8;
}
elseif(rmap->control_word==0xf)
{
rmap->dest_pos=tmap->cur_pos;
if(servo_dir==0)
{
rmap->dest_pos-=10000;
}
else
{
rmap->dest_pos+=10000;
}
}
}
else
{// 流水灯控制
if(rt_tick_get()-last_ms>RT_TICK_PER_SECOND/4)
{
staticuint8_tindex=0;
uint16_t*out=(uint16_t*)rmap;
last_ms=rt_tick_get();
*out=(0x01<<index);
index++;
if(index>=16)
index=0;
}
}
}
stop:
rt_thread_mdelay(5);
}
电机控制和 IO 控制在同一个 1ms 周期内完成,完全同步。
快速上手
第一步:
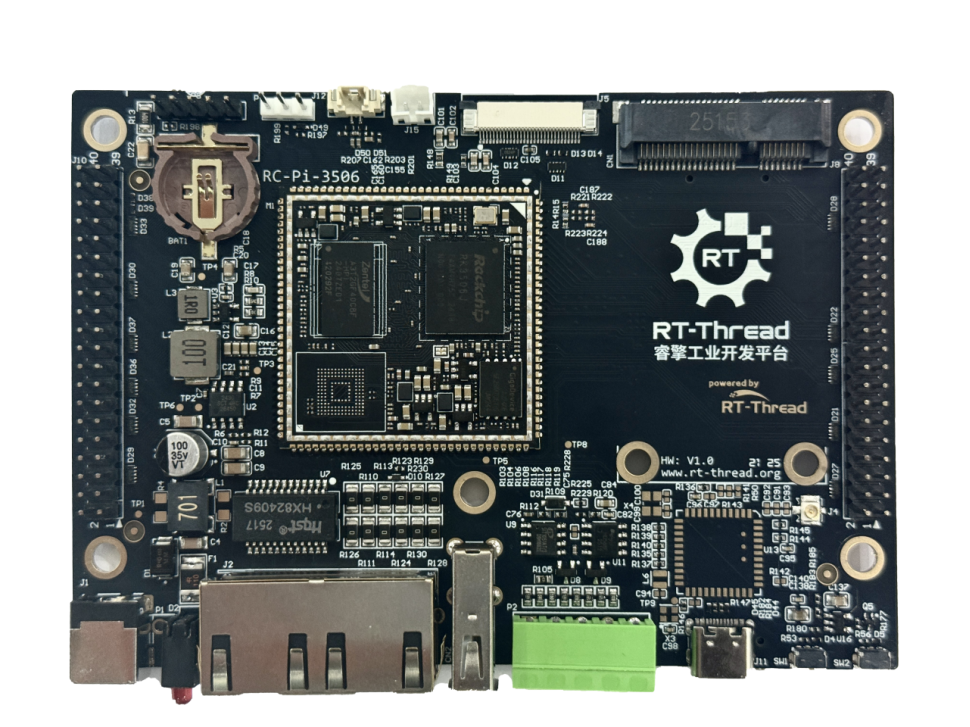
在RuiChing Studio中选择 05_gui_lvgl_ethercat_motor_control_7in_1024_600 示例工程

睿擎派 RC3506 开发板 + EtherCAT 伺服驱动器实物连接
第二步:按硬件连接图接好网线和显示屏,上电
第三步:编译下载,启动调试,显示屏自动亮起控制界面
第四步:拖动滑块设置目标位置,点击Run/Stop启动电机
整个过程无需手写一行 EtherCAT 协议代码,睿擎平台已封装好所有底层细节。
适用场景
●多轴运动控制:CNC 机床、机械臂、自动化产线
●工业 HMI:替代传统触摸屏 PLC,降低系统成本
●教学与原型验证:快速验证 EtherCAT 控制方案可行性
●设备状态可视化:实时显示电机位置、速度、转矩等运行参数
总结
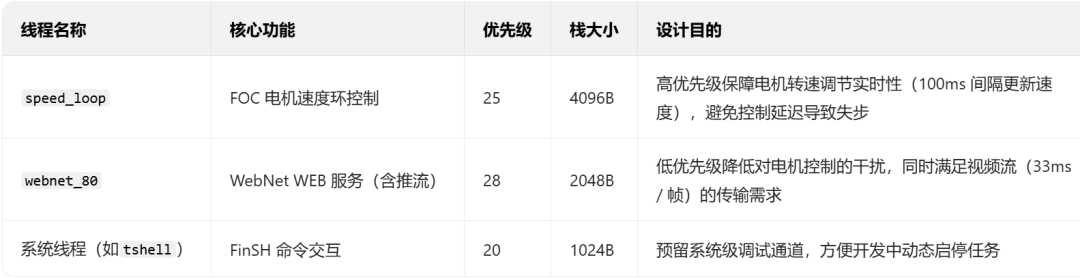
这个示例展示了睿擎派 RC3506 在工业控制场景的完整能力:
RT-Thread 实时内核保障 1ms EtherCAT 控制周期
LVGL 图形框架提供流畅的触控操作界面
EtherCAT 主站协议栈支持 CSP/CSV/CST 多种控制模式
多从站并行控制,电机 + IO 同步运行
RuiChing Studio 一键创建工程,开箱即用
如果你正在寻找一个既能跑实时控制、又能做可视化界面的嵌入式平台,睿擎派值得一试。
示例工程:
通过 RuiChing Studio 搜索 05_gui_lvgl_ethercat_motor_control_7in_1024_600 即可获取
开发文档:https://www.rt-thread.com/ruiching/document/site/
技术交流:欢迎在评论区留言,或加入睿擎开发者社区
完整资料包领取
想亲手跑通这个 LVGL + EtherCAT 电机控制示例?我们整理了完整资料包,助你快速复现:
示例完整工程源码(RuiChing Studio 可直接导入)
LVGL 界面源码 + 触控驱动配置说明
EtherCAT 主站使用指南
伺服驱动器 ESI 文件及配置指南
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
电机控制
+关注
关注
3602文章
2229浏览量
279536 -
伺服电机
+关注
关注
88文章
2210浏览量
61659 -
ethercat
+关注
关注
20文章
1620浏览量
46351 -
LVGL
+关注
关注
3文章
127浏览量
4697
发布评论请先 登录
相关推荐
热点推荐
基于LVGL驱动的OLED屏的FFT声音实时可视化
本项目旨在利用LVGL驱动的 Xiao-expansion-board的OLED显示屏实现FFT声音数据的实时可视化。关键内容包括利用LVGL

10分钟上手睿擎平台GUI开发:第一个LVGL图形应用
,在睿擎平台上支持LVGL能够更好地发挥其优势,为开发者带来更多便利。一环境搭建:5分钟极速配置1.睿擎
基于睿擎派轻松玩转CANopen电机控制
在工业自动化领域,稳定高效的设备间通信是核心。CANopen协议凭借其可靠性,成为众多工业设备(如伺服电机)的首选通信标准。今天,我们就来展示如何利用RT-Thread睿
睿擎EtherCAT多轴控制技术:如何实现低抖动高精度运动控制 | 深度解析
在工业自动化领域,运动控制的精度和稳定性直接决定了生产效率和产品质量。近日,睿擎SDKV1.5.0版本重磅发布,其中EtherCAT多轴
基于睿擎派的工业FOC无刷电机控制系统与WEB推流监看系统| 技术集结
需人员到场,导致运维效率较低。睿擎派嵌入式开发板具备串口外设接口与网络传输能力,可同时承载控制与监看需求,因此本项目基于该硬件展开开发。项目通过串口
【睿擎派】EtherCAT总线之IO模块读写
在上一篇文章《【睿擎派】CANOpen总线之IO模块读写(DS401协议)》我写了关于睿擎派上CANOpen的IO模块通信,为什么先写CAN
深度解析 | 低抖动高精度EtherCAT多轴控制的实现与实践案例
:
l 睿擎派RC3506工业开发板
l EtherCAT伺服驱动器(推荐汇川SV660N或LICHUAN-LC10E)
l
发表于 12-09 17:17

如何实现园区大屏可视化?
孪生可视化 构建平台利用Web三维可视化技术对现实场景进行仿真,实现园区级业务场景 的可视化呈现,助力企业快速完成项目的实施。

智慧大屏是如何实现数据可视化的?
智慧大屏,作为数据可视化的重要载体,已在城市管理、交通监控、商业运营等领域广泛应用。本文旨在阐述智慧大屏实现数据可视化的关键




评论