 通过LMC078实现单轴控制
通过LMC078实现单轴控制

Modicon LMC078是一款具有多种强大控制功能的运动控制器。本体自带Canopen、SercosIII、Modbus TCP、串行通讯等多种通讯接口,并可扩展Ethernet IP、Profibus DP(slave)。
通过安全、高速的SercosIII总线可实现最多 24轴的同步控制功能,同步时间可控制在4ms以内。
下面具体介绍LMC078搭配LXM32S伺服的应用
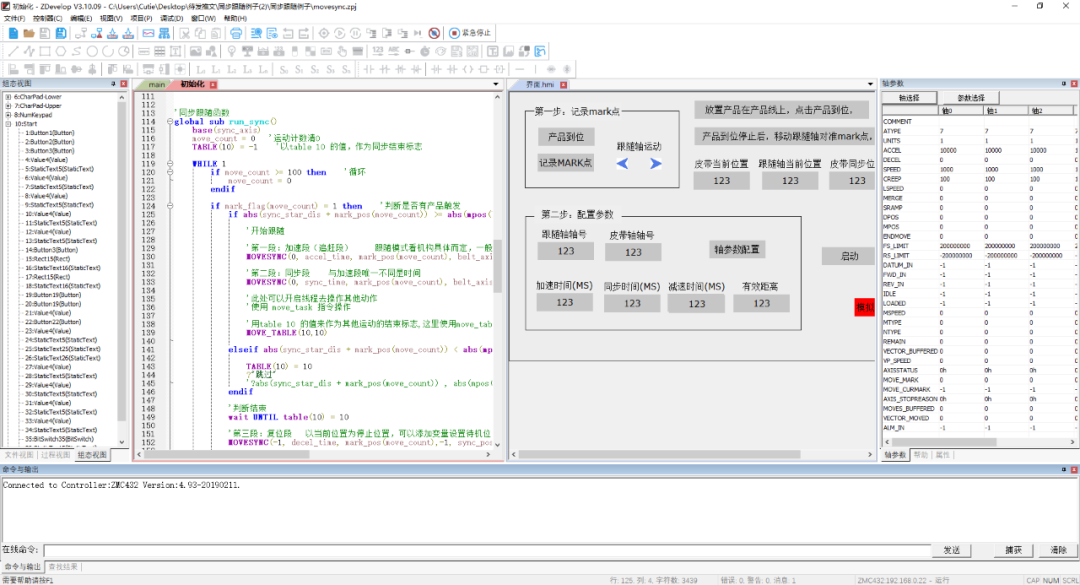
Somachine组态
添加轴
设置地址
位置比例设置
第一行:设置编码器分辨率
LXM32编码器分辨率为131072,对应十六进制为16#20000,一般默认无需更改
第二行:设置减速机的减速比
如果减速比为5,则左边写入5,右边写入1
第三行:位置比例设置
如果左边写入1,右边写入360,则表示360个用户单位对应齿轮输出转数为1圈
因为减速比为5,则360个单位对应电机旋转5圈,即360/5=72个用户单位对应电机转1圈
注意:此处位置比例配置与编程时给定速度和加速度的单位相关
s=User Unit
v=User Unit/s
a=User Unit/s2
控制器选择中扫描,选中PLC并双击激活
设备寻址中点击开始扫描
正常显示
编程
基本的运动功能块与LMC058类似,但参数读写需要调用
FB_SercosReadServiceDataAsync和FB_SercosWriteServiceDataAsync实现
-
控制器
+关注
关注
114文章
17890浏览量
195338 -
串行通讯
+关注
关注
2文章
80浏览量
16996 -
LMC078
+关注
关注
0文章
1浏览量
2517
原文标题:LMC078通过SercosIII总线控制LXM32S实现单轴控制
文章出处:【微信号:SE_AUT,微信公众号:自动化小天地】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
LMC7215/LMC7215-Q1/LMC7225的轨对轨CMOS比较器
步进定位单轴定位控制实验
Modicon LMC078运动控制器编程指南

ModiconLMC078可编程运动控制器产品目录

lmc058运动控制器产品手册
HPM6750芯片实现HMI与四轴伺服运动控制方案
运动控制器如何快速实现单轴/多轴同步跟随功能?
全国产EtherCAT运动控制边缘控制器(四):轴参数配置与单轴运动PC上位机C++控制

GraniStudio:单轴PTP运动例程

GraniStudio:单轴Jog运动例程

单轴/多轴 Trinamic 电机驱动模块怎么选?




评论