 HPM6750芯片实现HMI与四轴伺服运动控制方案
HPM6750芯片实现HMI与四轴伺服运动控制方案

当前工业应用多轴伺服运动控制系统对响应时间、响应速度和稳定性等指标要求越来越高,传统四轴伺服运动控制系统多采用模块化方式集成,HMI+Ether CAT/NVUC等控制器+伺服驱动器(多个组成)的拓扑结构,所挂载的伺服驱动器越多,数据传输和处理越复杂,控制精度、实时性、同步性能也相应受限。
四轴伺服电机方案介绍
本方案单芯片实现HMI与四轴伺服运动控制,无需总线通信反馈与交互控制,片内完成所有数据采集、处理和显示,对伺服控制和四电机的同步控制效率大大提高,如下演示视频为通过UI交互下的四轴伺服电机运动。
HPM6750芯片资源介绍
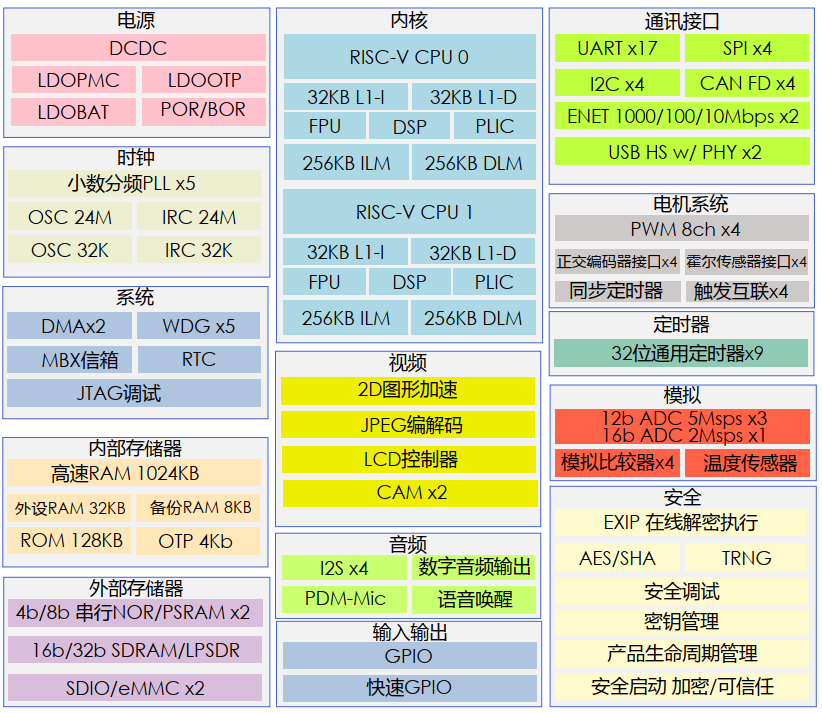
HPM6750采用双RISC-V内核,主频达816MHz ,凭借先楫半导体的创新总线架构、高效的L1缓存和本地存储器,创下了MCU 高于 9000 CoreMark和 4500以上 的DMIPS性能新记录,创造了RISC-V 全球主频和跑分新纪录。除了高算力RISC-V CPU,HPM6700系列产品还创造性地整合了一系列高性能外设:包括支持2D图形加速的显示系统、高速USB、千兆以太网、CAN FD等通讯接口,高速12位和高精度16位模数转换器,面向高性能电机控制和数字电源的运动控制系统。
HPM6750电机控制单元介绍
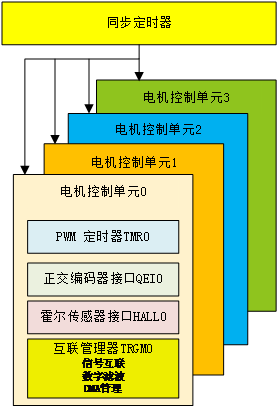
HPM6750系列支持4套电机控制单元,每个单元包括1个PWM定时器,一个正交编码器接口,一个霍尔传感器接口和1个互联管理接口,配合片上提供的数模转换ADC模块和ACMP等外设,可以实现同时控制4个电机。包含1个同步定时器,可以用于4套电机控制单元间进行同步。
1、PWM定时器
支持4个PWM定时器,单个PWM支持高达28位计数,支持24个通道;
2、同步定时器
当计数器计数达到比较值会输出一个比较事件,可以连接到其他定时器用作同步;
3、正交编码器接口QEI
支持4个正交编码器接口QEI,用以测量感应电机位置信息;
4、霍尔传感器接口HALL
支持4个霍尔传感器接口HALL;
5、互联管理TRGM
支持多个外设的输入输出信号可以相互连接,使得多个外设可以相互配合使用;
支持数字滤波,互联管理器支持管理外设DMA请求;
6、模拟外设
支持3个12位ADC,支持20个输入通道,支持单端和差分输入,高达5M采样率;
支持1个16位ADC,支持8个输入通道,高达2M采样率。
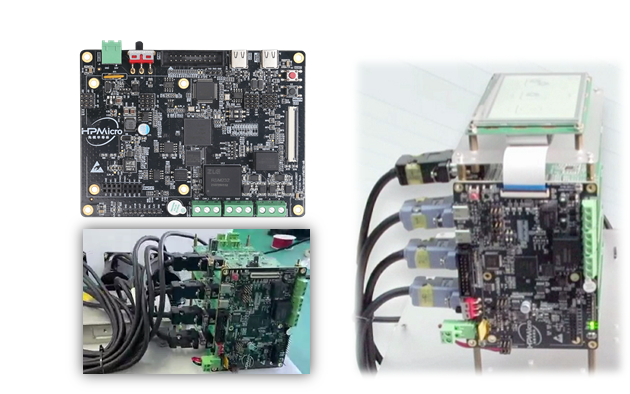
四轴伺服驱动评估板
视频中实现UI显示和四电机控制的评估为Four-Motor-HPM6750-MB评估板,该板设计上有4个电机专用接口,支持4个电机驱动板同时插入使用,同时控制4个电机。每个接口支持1路母线电压采集、3个相电流采集、6通道PWM控制,共支持4路编码器输入,硬件正交解码获取转子位置,实现伺服FOC控制。
审核编辑:郭婷
-
芯片
+关注
关注
463文章
54706浏览量
471481 -
半导体
+关注
关注
339文章
31560浏览量
267997 -
总线
+关注
关注
10文章
3071浏览量
91997
原文标题:四轴伺服+HMI单芯片解决方案
文章出处:【微信号:立功科技,微信公众号:立功科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
直线模组多轴组合使用的四大核心优势详解

HPM5E3YIVK单核32位RISC-V处理器
四轴无人机控制核心丨笙泉新品(CGF062A) 融合MCU与MDE优势, 实现稳定高效的飞行表现
基于MCU主控芯片的高性能伺服电机方案

固德晟基于瑞萨新一代RA8T2 MCU的EtherCAT双轴伺服控制方案介绍

hpm6750 高频发送 udp_send 时 过一段时间就返回ERR_INPROGRESS
运动控制卡稳定选型:CSNP1GCR01-AOW 工业级可靠应用解析
有奖直播 | 瑞萨RA8T2 EtherCAT双轴伺服控制方案

固件烧录速度实测:JTAG比UART快6.8倍

hpm6750 两个板载网卡+usbcdc_ecm网卡,多次调用ftp,切换网卡后,报错
施耐德电气机器运动控制“黄金四件套”整体解决方案全面推向市场
深度解析 | 低抖动高精度EtherCAT多轴控制的实现与实践案例
睿擎EtherCAT多轴控制技术:如何实现低抖动高精度运动控制 | 深度解析
TMC5041:单芯片双轴步进电机驱控方案,赋能精密静音运动控制

GraniStudio:单轴PTP运动例程




评论