 TCXO、差分晶振到OSC:SJK晶振在10万亿机器人市场的隐形守护
TCXO、差分晶振到OSC:SJK晶振在10万亿机器人市场的隐形守护

12月28日,在吴晓波年度演讲中,具身智能机器人被反复提及。吴晓波指出,它将成为中国未来四个10万亿级市场之一。
这一判断并非基于概念热度,而是产业结构变化。在全球 AI竞争的G2格局中,中国正在形成完整的硬件体系。当前,机器人与智能设备的核心零部件中,约65%来自本土供应链。
当 AI不再停留在算法层,而是进入实体系统,一个问题随之出现:系统运行是否可控,是否可长期运行,是否具备工程可复制性。
答案,藏在一个极少被讨论,却无处不在的元器件——晶振。
一、具身智能系统的一致性难题
具身智能机器人正在从演示阶段进入实际应用阶段,这一转变的关键,不在模型参数规模,而在系统协同能力。
当机器人开始行走、抓取、协作,多关节同时工作,对控制系统提出明确要求。
动作是否同步,传感数据是否按时采集,通信是否连续。系统并不依赖单点性能,而依赖整体一致性。晶体振荡器为系统提供基础时钟信号,决定各模块是否在同一时间基准下运行。
二、晶振在机器人系统中的作用
1.动作协同:无源晶振、有源晶振为伺服电机和控制单元提供统一时序。在多关节系统中,时序偏差会直接影响动作协调。
2.环境感知:在防爆机器人、移动机器人中,VC-TCXO用于传感器与控制模块。其作用是保证采样与处理过程在温度变化下保持一致。
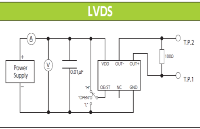
3.高速通信:在人脸识别、光通信、边缘计算等场景中,差分晶振用于高速接口。其作用是降低时序误差,保障数据链路连续。
系统运行时间越长,对频率稳定性的依赖越明显。
三、不同机器人系统的晶振应用方案
SJK晶科鑫从事频控器件研发与制造几十余年,针对不同机器人系统,形成对应的器件配置方式。
1.人型机器人:3225有源晶振,32.768kHz,3.3V,用于RTC与低功耗唤醒模块,适配空间受限的系统结构。
2.防爆机器人:VC-TCXO 3225,38.4MHz,精度 0.5ppm,LVCMOS输出,用于在温差与振动环境中维持控制系统的频率一致性。
3.移动机器人AGV / AMR:5032 2PIN 8MHz 20PF,3225 25MHz 18PF,用于导航、定位与动力控制模块,适配长期运行需求。
- 智能交互与跟拍机器人:2016 SMD 24MHz 12PF,3225 SMD 12MHz 20PF用于图像处理与语音识别主控芯片,匹配高速处理需求。
四、工业 5.0的系统级基础
在全球 189座灯塔工厂中,中国占79座,覆盖汽车、电子、能源等多个行业。工业5.0的核心,并非单一设备自动化,而是系统级的长期协同与可复制运行。
在工业交换机、通信网关和控制网络中,系统能否稳定运行,取决于各模块是否工作在统一的时间基准下。晶振正是为这些系统提供基础时钟信号,支撑多模块协同与 7×24小时连续运行。
以工业通信与机器人系统为例,SJK晶科鑫的晶振配置包括:
无源晶振:3225封装(25/27/10/30.1MHz)及2012封装(32.768kHz),用于基础时序与低功耗计时电路。
有源晶振:3225 OSC(48/25MHz)与5032 OSC(10MHz),为通信接口与控制单元提供稳定时钟驱动。
目前,相关方案已广泛应用于工业通信设备、具身机器人及机械臂电机控制系统中。
五、常见晶振类型与机器人选型要点
在具身机器人走向规模化应用的过程中,晶振选型直接关系到系统的一致性与长期稳定性。
1.展频晶振:通过展频技术降低电磁辐射,在保持±20ppm频率稳定度的同时,有助于系统通过EMC测试,适用于工业AI质检、电机监控等强干扰环境。
2.贴片晶振:如7U(3225)、7E(2520)、7F(2016)、7Y(1612)等系列,具备耐高温、防潮湿及成本可控的特点,适用于能源监控传感器、基础AI检测设备等需大规模部署的场景。
六、工程选型中通常重点关注以下因素:
1.频率稳定性:例如7050封装的156MHz差分晶振,用于系统级同步与高速接口。
2.封装尺寸:2016及更小封装已成为高集成度系统的常见选择。
3.负载电容匹配:需与主控电路匹配(如9PF、12PF、18PF),以避免频率偏差。
具身机器人正步入工程验证与规模化阶段,系统稳定性已成为决定性因素。
晶振虽不直接参与算法运算,却决定了整个系统能否在统一的时间基准下可靠运行。SJK晶科鑫提供覆盖2016至7050封装的全系列晶振产品,包括TCXO、差分晶振及OSC等,全面支持机器人及各类工业系统的基础时序需求。
-
机器人
+关注
关注
213文章
31440浏览量
223639 -
差分晶振
+关注
关注
0文章
189浏览量
2097
发布评论请先 登录
YXC扬兴高精度时钟温补晶振:决定机器人性能上限的关键应用

数字世界高效运行的“隐形引擎”——差分晶振

差分晶振强劲赋能算力、服务器、AI、光通信与机器人产业

TCXO晶振:YXC扬兴科技 | 助力机器人运动控制提升方案

杭晶电子差分晶振产品在视频领域的应用



从“车找电”到“电找车”:有源晶振,凭什么成为系统的节拍核心?

晶体晶振在机器人五大核心模块的关键作用



晶振在机器人领域的应用
石英晶振在人形机器人中的应用




评论