 正运动技术喜获机器人应用典型案例奖!
正运动技术喜获机器人应用典型案例奖!


“中国核心·驱动未来”
12月19日,深圳市机器人协会年度大会暨2025深圳机器人年度评选颁奖典礼在深圳国际会展中心洲际酒店顺利召开。本次会议以“凝聚共识、汇聚资源、突破瓶颈”为方向,汇集了院士学者、行业领军企业代表及前沿创新团队,共同分析产业演进方向、研讨关键技术路线,旨在携手打造自主可控的人形机器人产业新生态。

“自主可控·技术赋能”
在本次年度评选颁奖典礼中,正运动技术凭借『通用柔性机械手视觉供料解决方案』荣获『机器人应用典型案例奖』。正运动始终坚持以自主可控的运动控制技术为核心,紧密围绕市场需求与客户反馈,持续推动产品创新与系统方案优化。公司致力于为客户提供高度集成的一体化解决方案,有效帮助降低生产成本、减轻对专业技术人员依赖、显著提升工艺产能,以自主技术赋能智能制造升级。

机器人应用典型案例奖
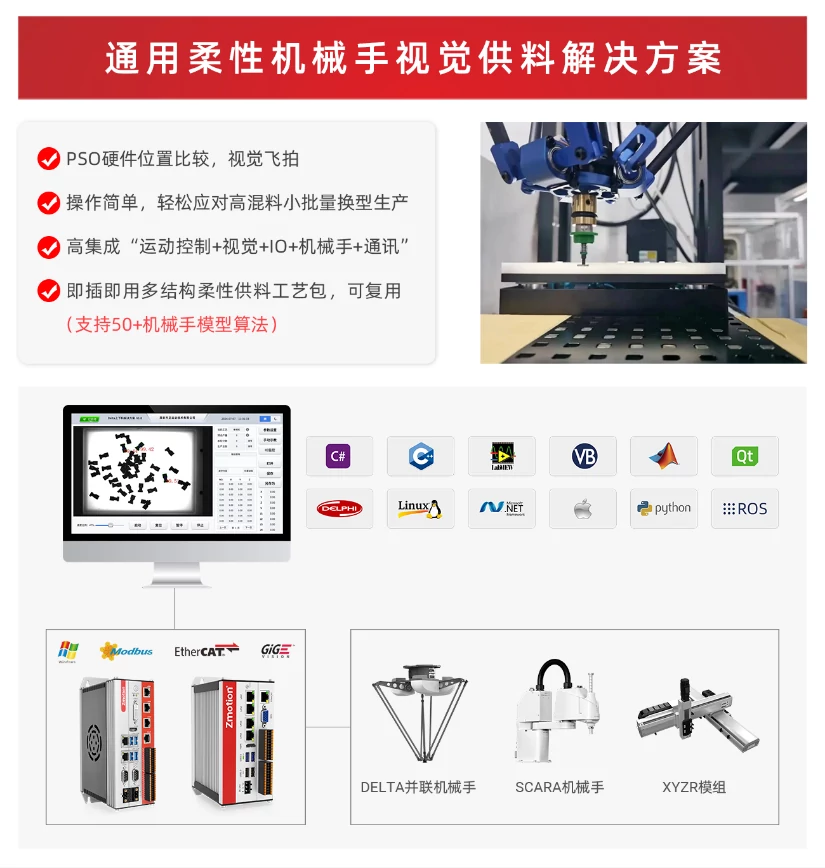
通用柔性机械手视觉供料解决方案
——机器人应用典型案例奖获奖方案
正运动技术研发的通用柔性机械手视觉供料解决方案,基于VPLC系列机器视觉运动控制一体机开发。该方案有效突破传统供料方式在柔性适配与效率上的局限,支持快速物料切换与灵活工艺配置,显著提升了系统的兼容性与整体生产效率。

01应用优势
● 技术门槛低:拖拽式中文组态视觉,应用工程师经过简单培训可轻松上手。
● 项目开发周期快:成熟的视觉机械手柔振工艺方案,减少用户开发时间成本。
● 软硬件集成性强:集成EtherCAT总线、脉冲混合控制,机器视觉、运动控制、集软硬于一体易于设备调试与排除问题。
● 降低企业用人成本:一人即可调试设备的运动控制、视觉、IO逻辑控制等,解决工程人员流失、用人成本高等问题。
● 柔性化生产:可保存多个物料的视觉和运控配置程序,一键完成工艺包切换。可灵活处理不同尺寸和形状的工件,无需频繁更换硬件,降低产线停机时间。
02高集成机器视觉运动控制一体机VPLC7系列
x86平台实时Windows机器视觉EtherCAT运动控制器,集成视觉、运动控制、IO控制以及监控等一体化控制。

● 4-64轴运动控制可选(脉冲+EtherCAT总线),EtherCAT最小通讯周期250us。
● 内置强实时运动控制内核MotionRT750,支持第三方视觉软件。
● 板载20路通用输入(其中VPLC711的10路和VPLC712的8路为高速输入),20路高速输出。
● 基于x86架构的EtherCAT总线视觉运动控制器,支持脱机运行,内置丰富的视觉和运动控制功能,大幅简化配置流程。
● 支持EtherCAT冗余功能,解决单点故障停机,自动诊断并持续运行,增强系统可靠性,简化维护工作。
● 提供一体化开放式IPC形态的实时软控制器/软PLC集成的视觉+运动控制解决方案。
运动控制产品预览
超高实时PCIe EtherCAT运动控制卡
● EtherCAT总线4-254轴可选;
● EtherCAT同步周期可快至62.5us;
● EtherCAT总线冗余,断线自动切换,降低停机风险;
● 运动规划PT/PVT模式,实时计算路径;
● 动态变速与位移,实现软着陆精准力控;
● SS曲线:确保运动平稳,消除高速抖动;
● 搭载强实时内核MotionRT750;
● 可1-6路独立EtherCAT主站,各通道EtherCAT同步周期可自由配置(125us-1ms);
● 高速IO输入输出,支持硬件比较输出PSO、PWM、硬件锁存等多项实时控制功能。
全自主实时运动控制内核MotionRT750
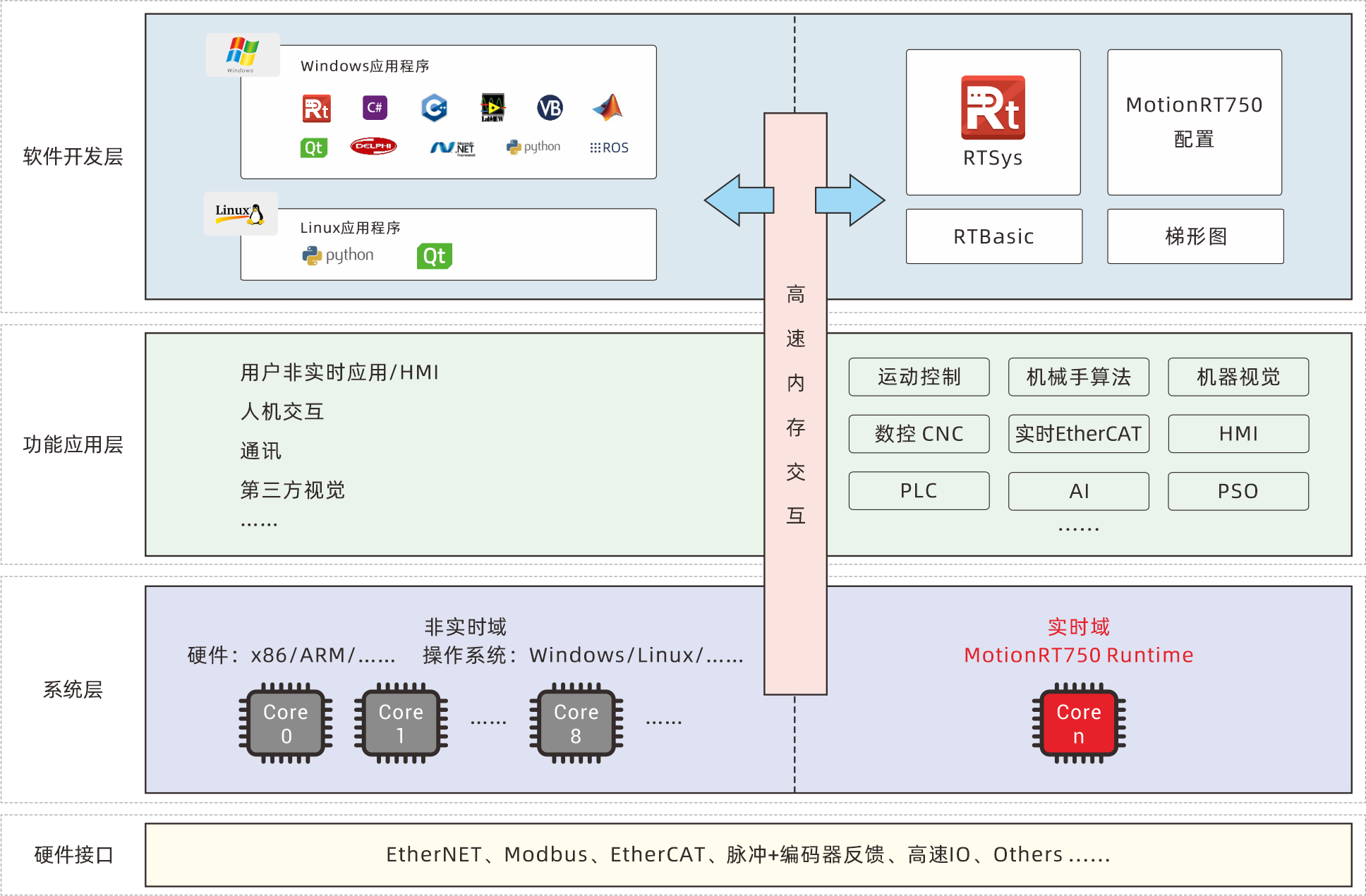
支持多达254轴的高精度协同运动控制,控制周期可低至125μs,并通过微秒级指令交互实现10-100倍的速度提升,显著提升设备性能与整体效能。
系统采用冗余架构保障稳定运行,即使上位机发生故障,控制内核仍可持续工作并确保急停安全功能有效,从而杜绝非计划停产,为工业安全生产提供了坚实保障。
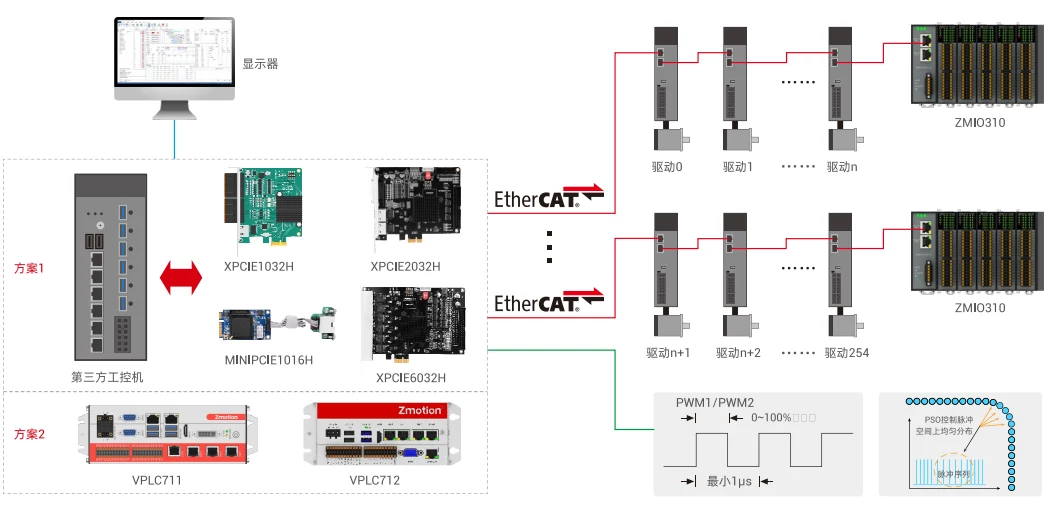
运动控制解决方案应用预览




愿景
此次获奖对我们而言,是一个新开始。正运动技术将持续专注于自主可控的运动控制技术研发与突破,并加强对高速高精度、柔性化等核心工业应用领域关键技术应用指标的攻坚力度。面向智能制造的时代需求,我们致力于通过创新帮助客户实现降本增效,为客户提供扎实的技术支持,共同推动工业控制走向更智能、更可靠、更高效的未来,创造持久而真实的价值。
审核编辑 黄宇
-
机器人
+关注
关注
213文章
31500浏览量
223885 -
运动控制器
+关注
关注
2文章
494浏览量
26156 -
运动控制卡
+关注
关注
7文章
133浏览量
16161 -
正运动技术
+关注
关注
0文章
138浏览量
914
发布评论请先 登录
人形机器人爆发背后,一个被忽视的核心技术:机器人运动学控制

再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
「喜报」三千步斩获机器人应用典型案例奖,引领智慧康养新风范

中科创达旗下晓悟智能斩获十年荣耀移动机器人工程应用典范奖
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
小萝卜机器人的故事
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
工业机器人的特点
MT6701磁编芯片:开创机器人运动控制新时代

导远科技斩获焉知人形机器人知鼎奖
NVIDIA 通过云端至机器人计算平台驱动人形机器人技术,赋能物理 AI




评论