 接收头及其引脚判断简法
接收头及其引脚判断简法

平时, 在维修中遇到红外线接收头损坏均找同型号的接收头进行代换, 由于电视机品牌众多, 接收头也各式各样, 这给代换中带来了不便。可否有一种通用型接收头呢?答案肯定, 有现在市场上流行一种万能接收头, 类似于塑封三极管如图1所示。只要我们能正确判断出其引脚功能就可方便用于各种代换。
判断引脚简法:用万用表R×1kΩ档, 先假定任一引脚为接地脚, 黑表笔接假定地脚,红表笔分别测量另外两个引脚, 这时测得电阻如果在5~6kΩ左右, 说明假定脚为接地脚正确, 否则需重新查找, 直到找出地脚为止。
最后用万用表两表笔对未知两脚分别作正反测量, 当测量中出现较大阻值时, 这时红笔所接为输出脚(OUT), 黑笔所接则为电源引脚。
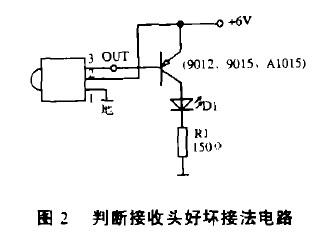
对于接收头好坏的判断只需用遥控器对其操作,再测量输出脚的电压一般在4-4.8v,应有0.6v左右下降且抖动则可认为正常参见图2所示。反之, 也可判断检修遥控板。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
发布评论请先 登录
相关推荐
热点推荐
ADV7384:汽车摄像头总线(C²B)四路接收器的卓越之选
ADV7384:汽车摄像头总线(C²B)四路接收器的卓越之选 在汽车电子领域,对于视频数据传输和控制的需求日益增长。ADV7384作为一款Car Camera Bus(C²B)四路接收器,凭借其丰富
红外接收头:不可或缺的光电感知核心
随着IoT和消费电子发展,红外接收头需求稳步增长,低功耗、高集成度、强抗干扰是未来技术演进方向。洲光源推出的红外接收头产品,基于成熟的设计与验证,将红外光信号转换为电信号的集成化光电元

意法半导体与Calumino合作开发边缘AI隐私优先型摄像头
随着城市与家居变得越来越智能化和互联化,基于图像的数据采集需求迅速增长,与此同时,人们对隐私问题的担忧也愈发强烈。Calumino将隐私放在首位,开发出全球首款专为大众市场摄像头模块设计的经济型热
自动驾驶汽车如何依靠摄像头判断距离?
[首发于智驾最前沿微信公众号]车载摄像头在自动驾驶中,就像是“看见世界”的眼睛,其主要任务是把外界的光学信息转换成计算机能理解的像素数据,再通过一系列算法,从这些像素中提炼出“有什么物体、在什么位置

ESP32-S3在初始化摄像头时检测到摄像头模组型号不被支持
、供电不足或ESP32-S3引脚配置错误。
二、分步解决方案
1. 第一步:确认摄像头模组型号(关键)
ESP32-S3官方驱动仅原生支持 OV2640(200万像素)和 OV5640(500万像素
发表于 02-11 06:38
光电双测头 测量原理
关键字: 光电测头,光电测量仪,光电测径仪,光电镜头,国产光电测径仪,
双测头由两组测头构成,两组测头以净间距B平行设置。
当被测物通过2束平行光视场时,将在两个
发表于 01-15 15:06
接收头/光电开关 选型手册2025年最新版
1.接收头具有高灵敏度、抗干扰、宽电压范围、数字输出、快速响应、小型化封装和广泛应用等特点。适用于遥控器接收、红外通信和自动化控制等领域,提供可靠的红外信号接收和解调功能。2.光电开关
发表于 12-30 11:30
•5次下载
自动驾驶既然有双目摄像头了,为什么还要三目摄像头?
[首发于智驾最前沿微信公众号]在自动驾驶领域,纯视觉方案一直受到不少人的认可。双目摄像头由于模拟了人眼的工作方式,能够通过视差计算还原三维信息,在距离判断和空间感知上具有天然优势,因此被广泛应用于纯

条件判断法来实现状态机
S0 只需要考虑事件 E1 的处理就行了。
既然是两个 switch—case 之间的嵌套, 那么就有一个谁嵌套谁的问题, 所以说 switch—case法有两种写法:状态嵌套事件和事件嵌套
发表于 12-09 08:18
如何判断贴片电容和电阻的阻值?
判断贴片电容和电阻的阻值(或容值)需结合标识识别、仪器测量及环境因素考量,以下是具体方法及步骤: 一、贴片电阻阻值判断方法 1. 数字标识法(主流方法) 三位数标识(精度±5%): 规则:前两位为

充电头PSE认证检测项目
PSE认证(日本电气用品安全法)是出口日本市场的强制性认证,适用于AC插电类电子产品,如手机充电器、USB充电头、电源适配器等。下面是针对充电头(AC-DC充电器)的PSE认证检测项目说明:一、充电
100微法电容怎么测量
本文介绍了三种主流测量电容的方法:万用表直接测量法、指针式万用表、差动式直流充电法。其中,万用表直接测量法操作简单、成本低,适合现场维修等场景;指针式万用表精度较低,更适合快速判断电容

常用的数字滤波器算法及其特性
如何,适用场合是什么样的呢? 一 限幅滤波法(又称程序判断滤波法) 方法:根据经验判断,确定两次采样允许的最大偏差值(设为A),每次检测到新值时判断



评论