 浅谈无损检测行业中直角坐标机器人的运用
浅谈无损检测行业中直角坐标机器人的运用

工业应用中,能够实现自动控制的、可重复编程的、多功能的、多自由度的、运动自由度建成空间直角关系、多用途的操作机。他能够搬运物体、操作工具,以完成各种作业。关于机器人的定义随着科技的不断发展,在不断的完善,直角坐标机器人作为机器人的一种,其含义也在不断的完善中。
一 直角坐标机器人介绍
直角坐标机器人 (英文名: Cartesian coordinate robot),大型的直角坐标机器人也称桁架机器人或龙门式机器人(英文名:gantry robot;德文名:Protalroboter)是能够实现自动控制的、可重复编程的、多自由度的、运动自由度建成空间直角关系的、多用途的操作机。其工作的行为方式主要是通过完成沿着X、Y、Z轴上的线性运动。
直角坐标机器人主要由一些直线运动单元,驱动电机,控制系统和末端操作器组成。每一个机器人都是根据特定的要求的产生而设计的,设计的第一步就是要将使用要求分析清楚,确定设计时需要考虑的参数,包括:机器人的定位精度,重复定位精度;机器人的负载大小,负载特性;机器人运动的自由度数量,每自由度的运动行程;机器人的工作周期或运动速度,加减速特性;机器人的运动轨迹,动作的关联;机器人的工作环境、安装方式;机器人的运行工作制、运行寿命;其他特殊要求;下面是其主要特点:
1任意组合成各种结构样式,带载能力和尺寸的机器人,
2采用多根直线运动单元级连和齿轮齿条传动,可以形成几十米的超大行程机器人。
3采用多根直线运动单元平连及各带多滑块结构时其负载能力可增加到数吨。
4 其最大运行速度可达到每秒8米,加速度可达到每秒4米。
5 重复定位精度可达到0.05mm或0.01mm。
6 采用带有RTCP功能的五轴或五轴以上数控系统能完成非常复杂轨迹的工作。
德国百格拉公司是世界上最着名的直角坐标机器人供应商之一,生产多种规格的直线运动单元/导轨、步进电机、交流伺服电机、直线电机和多轴数控系统。因末端操作工具的不同,直角坐标机器人可以非常方便的用作各种自动化设备,完成如焊接、搬运、上下料、包装、码垛、拆垛、检测、探伤、分类、装配、贴标、喷码、打码、(软仿型)喷涂、目标跟随、排爆等一系列工作。特别适用于多品种、便批量的柔性化作业,对于稳定提高产品质量,提高劳动生产率,改善劳动条件和产品的快速更新换代起着十分重要的作用。
百格拉公司的120多名专家及工程技术人员成功开发生产了各种规格的线性导轨,并在此基础上与用户密切合作开发通用及专用机器人,已为许多厂家提供了数千台各种专用机器人及生产线。其中一个应用领域是无损检测。在超大批量生产中,每个产品的主要功能,或整个产品的所有功能都要经过严格的100%的检测。而且检测周期要很短,来满足超大批量生产的要求。
二 案例一————圆柱形航空部件无损探伤检测
对于一些圆柱形的工件及设备,要达到全方位的检测就非常的困难。本项目中为对航空飞船的圆柱形部件进行无损检测,该部件高1000mm,φ500,需要进行从下到上的360度全面检测。由于需要对该工件进行360度的检测,并且检测头与工件要求时时保持固定的距离,所以对该机器人重复定位精度的要求就比较高,为0.05mm.
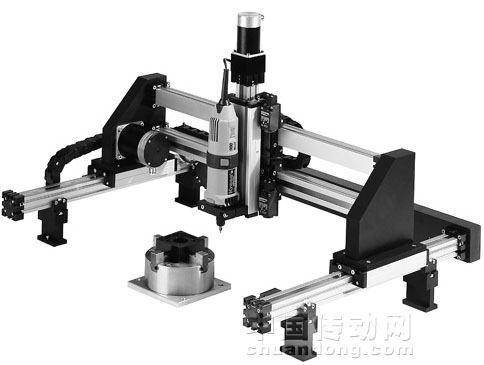
机器人方面我们选用的为德国百格拉二维直角坐标机器人, 两个方向均采用PAS42形导轨,其中X方向选择为PAS42BRM1000,Z方向选择为PAS42BRM500.旋转轴为德国百格拉VRDM31117步进电机加减速比为8的NEUGART减速机和一些辅助连接件构成的转台。具体结构如图一所示。
控制系统我们采用的为德国ENGERHART公司的三轴数控系统进行控制,X轴与Z轴电机均采用德国百格拉公司SER31122伺服电机与减速比为8的NEUGART减速机来控制。由于整套设备采用了德国百格拉公司伺服电机与德国百格拉公司直角坐标机器人,所以完全保证了整个系统的精度,甚至于在整个系统重复定位精度检测中多次检测到了u级精度,大大提高了检测的质量。
该系统的整个工作过程如下:首先数控系统控制X,Z两轴联动,运动于最下方的检测位置,到达位置后通过I/O口控制检测头工作,然后控制旋转轴以一定的速度旋转一周进行检测。以上完成了一圈的检测,然后Z轴上移一定距离,进行下一圈的检测,以后以此类推,最后完成整个检测。
三 案例二————-超大型圆柱类钢件无损探伤扫描
被测物体是8m长,直径600mm的柱类钢件,放在一个大型液体容器里。大型容器的两端各有一个夹具,用于水平固定柱类钢件。
机器人方面我们选用的为德国百格拉二维直角坐标机器人, 两个方向均采用PAS42形导轨,其中X方向选择为PAS42BRM1000,Z方向选择为PAS42BRM500.其中X轴我们选择的电机为百格拉SER31122伺服电机加上减速比为的64的NEUGART减速机。Z轴我们选择的电机为百格拉SER31122伺服电机加上减速比为64的NEUGART减速机。
整个系统的工作过程为旋转轴带动长约8m的钢件每旋转一个角度X1后静止,Z轴下到钢件表面X2毫米高后停止。这时X轴开始运动,每移动X3毫米探头扫描一次,完成X轴方向8m长的扫描后X轴和Z轴都处于静止状态。旋转轴再按原转动方向转动X1度停止,X轴开设扫描运动。
所以整个过程需要机器人的动作保持高重复性,平稳性,并且要求定位极其精确。X轴的定位精度如下:电机每转为16384点,经行星减速机64倍减速后为16384*64。X轴的驱动轴每转一转,X轴行走175mm,电机每转一步X轴走175000/16384/64 =0.167 μm. X轴的定位精度如下:电机每转为16384点,经行星减速机64倍减速后为16384*64。旋转轴每转一转对应的周长是600*3.14 = 1884mm, 电机每转一步旋转轴表面转过1884000/16384/64 =1.797 μm。实际上用不着这样高的精度,而用精密行星减速机的目的是为了大量减少驱动电机与负载的转动惯量比,来保证各轴的精确平稳运行。
四 案例三————-对仪表板进行无损探伤扫描
该系统要求采用超声无损探伤对航天飞船上的许多部件进行无损扫描。该设备要求可对部件从上到下360°无损探伤扫描,扫描密度几乎没有限制,可以非常精密,也可以仅对部件的几个关键部位进行无损探伤扫描。检测工件的最大范围为5400*5400*400 mm.
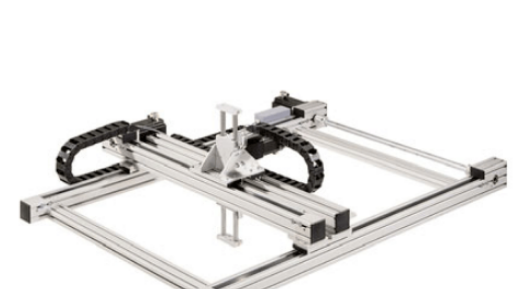
该套系统选用德国百格拉三维直角坐标机器人,其中X轴选择为PAS44BRM5400,Y轴选择为PAS44BRM5400,Z轴选择为PAS44BRM400,同时,由于跨度为5400,所以对于Y轴我们选择双导轨结构,并且每200mm加固连接板的结构来防止挠度的出现。在Z轴下端上我们装配可旋转超声探头,探头旋转角度是0~360°。具体结构如图三所示,图四为检测后的工件。
控制系统使用百格拉公司TLCC,驱动电机是百格拉公司智能伺服控制系统TLC612,TLC411实现定位控制。TLCC是一个专用工控机,通过CAN总线控制TLC伺服控制系统。TLCC可以预存很多部件的几何数据,用于引导超声探头等距离或多方位、多角度的无损探伤扫描。得到的测量数据可以存储在TLCC中,可以给出分析探伤的结果,可以打印或上传给上位机,以便进一步保存和分析,也可以显示出探伤扫描图象及对应滤波,增强、放大、旋转、特征提取及分析等。
总结及展望
本文讲述了德国百格拉公司的直角坐标机器人配套超声波扫描仪,在工件探伤中的三例应用。此外,德国百格拉公司的直角坐标机器人还被大量用于X射线探伤扫描。类似的应用还有配备CCD摄像机来检验和识别一些印刷品的质量。配备激光高度测量仪来对超大物体的三维形状进行测量和检验,如大型铸件和飞机上许多三维铝板等。在许多测量工作中,德国百格拉公司的直角坐标机器人多年来运行非常稳定可靠。用德国百格拉公司的直角坐标机器人和直线运动单元可以很快组装成几乎所需的各种样式尺寸的测试专用机器人,节省时间,人力和费用。北京两家用户用德国百格拉公司的直角坐标机器人和CCD摄像机来检验物体,两年来机器人运行非常平稳。
-
机器人
+关注
关注
214文章
31633浏览量
224471 -
RTCP
+关注
关注
0文章
5浏览量
8857 -
驱动电机
+关注
关注
10文章
440浏览量
32345
发布评论请先 登录
直角坐标机器人如何选型
直角坐标机器人在汽车发动机涂胶机上的应用
德国BAHR直角坐标机器人在无损探伤设备的应用
直角坐标机器人和关节机器人的特性及应用对比
直角坐标机器人的定义及主要特点
直角坐标机器人的结构组成及在铝锭搬运中的应用
直角坐标机器人码垛机的工作原理以及产品特点的介绍
直角坐标机器人技术在码垛机上的应用将越来越多
直角坐标机器人&关节机器人的区别详解
机械手的直角坐标|多关节|圆柱坐标|极(球)坐标式运行方式简述
直角坐标机器人&amp;关节机器人的区别详解

机械手的直角坐标|多关节|圆柱坐标|极(球)坐标式运行方式简述
高效、精确、可靠的自动化设备——直角坐标机器人



评论