 机械手的直角坐标|多关节|圆柱坐标|极(球)坐标式运行方式简述
机械手的直角坐标|多关节|圆柱坐标|极(球)坐标式运行方式简述

机械手的手臂运动形式有所不同,一般情况下机械手可以分为:直角坐标式、多关节式、圆柱坐标式、极(球)坐标式四种形式。
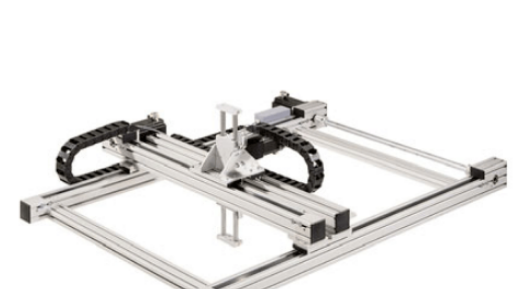
1.直角坐标式就是机械手在直角坐标系的三个坐标轴方向作直线移动,即机械手的前后移动、上下升降、左右移动。直角坐标机器人可达到很高的位置精度(μm级)。针对不同的应用场合,对直角坐标机器人有不同的设计要求,比如根据对精度、速度的要求选择不同的传动方式,根据特定的工艺要求为末端工作头选择不同的夹持设备(夹具、爪手、安装架等),以及对于示教编程,坐标定位、视觉识别等工作模式的设计选择等,从而使之能满足于不同领域、不同工况的应用要求。
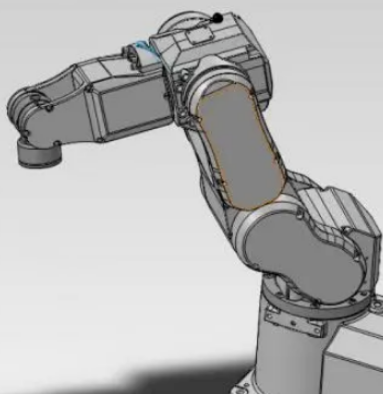
2.多关节式一般就是手臂会分为大臂和小臂两段,大小臂之间由肘关节连接,而大臂与立柱之间又连接成肩关节,再加上手腕与小臂之间的腕关节。但编程和操控必须由供应商通过专业培训才能完成,而且特殊软件需要收费。维护和维修完全受制于人,由于品牌互相不兼容,硬件故障必须由供应商或厂家直接提供,非市场通用产品,费用高昂。
3.圆柱坐标式这种就是机械手作前后伸缩、上下升降和在水平面内摆的动作。这种机器人构造比较简单,精度还可以,常用于搬运作业。其工作空间是一个圆柱状的空间。

4.极(球)坐标式就是机械手作前后伸缩、上下俯仰和左右摆动的动作。这种机器人结构简单、成本较低,但精度不很高。主要应用于搬运作业。其工作空间是一个类球形的空间。

CRT专业提供工业自动化运动控制技术及解决方案!
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机械手
+关注
关注
7文章
363浏览量
31642
发布评论请先 登录
相关推荐
热点推荐
SMT贴片坐标总对不准?4个快速校正技巧让生产效率翻倍
23年PCBA一站式行业经验PCBA加工厂家今天为大家讲讲SMT贴片加工如何快速校正SMT坐标?SMT贴片加工快速校正SMT坐标的方法。在SMT贴片加工中,快速校正坐标的核心流程是:获
三坐标测头座怎么选?一文读懂3大结构类型
测头座是连接三坐标测量机运动轴与测针的关键部件,它的结构设计直接决定测头角度调整的灵活性、定位精度的稳定性,更影响着复杂零件测量的效率与可靠性。不同类型的测头座适用于不同的测量场景与自动化需求,所以

三坐标如何实现测量效率的提升?
精密制造的产线节奏日益加快,传统三坐标测量机面临着“要么放慢速度保精度,要么牺牲精度换速度”的困境制约着生产效率的提升。MizarGold三坐标测量机通过材料创新与传动优化,实现了测量速度快的同时不

PCB设计坐标超出范围的解决方案
在 PCB 设计空间极限外的某些极端坐标处,对象无法移动(或若已放置,例如从机械 DXF 导入的对象,无法通过鼠标选中)。
三坐标测量仪:从机械精密到智能协同的技术
三坐标测量仪从“点测量”到“空间测量”三坐标的桥式结构设计打破了机械结构对精度的限制。它通过花岗岩工作台与高性能导轨的组合,构建了稳定的三维测量基准。三
发表于 08-28 13:50
•1次下载
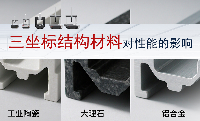
三坐标测量机结构材料对性能的影响
三坐标测量机结构材料对测量精度、性能有很大影响,随着各种新型材料的研究、开发和应用,三坐标测量机结构材料种类越来越多。目前三坐标测量机主流结构材料为花岗岩、铝合金,工业陶瓷基本只出现在高端三坐
发表于 08-28 13:46
•1次下载
三坐标误差补偿技术:陶瓷横梁如何让三坐标少修正,更精准?
偏差无法通过机械结构完全消除,始终干扰最终结果:传统三坐标的精度本质是机械精度+补偿算法,当设备本身的角度误差(如X轴与Y轴的垂直度偏差)超过2角秒,测量软件每增
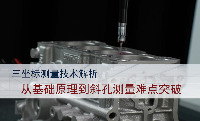
三坐标测量技术解析:从基础原理到斜孔测量难点突破
基础原理三坐标测量仪(CoordinateMeasuringMachine,CMM)这种集机械、电子、计算机技术于一体的三维测量设备,其核心技术原理在于:当接触式或非接触式测头接触感应
发表于 08-15 14:06
•1次下载
三坐标测量机结构材料对性能的影响
三坐标测量机结构材料对测量精度、性能有很大影响,随着各种新型材料的研究、开发和应用,三坐标测量机结构材料种类越来越多。目前三坐标测量机主流结构材料为花岗岩、铝合金,工业陶瓷基本只出现在高端三坐
Mizar Gold高精度移动桥式三坐标测量机发布
三坐标测量机运动部分X轴横梁和Z轴,目前多采用花岗岩、航空铝合金、工业陶瓷,分别应用于不同应用场景。超高精密三坐标测量机,多使用优质花岗岩和陶瓷材料。

三坐标测量技术解析:从基础原理到斜孔测量难点突破
基础原理三坐标测量仪(CoordinateMeasuringMachine,CMM)这种集机械、电子、计算机技术于一体的三维测量设备,其核心技术原理在于:当接触式或非接触式测头接触感应
凡亿Allegro Skill工艺辅助之导出公制的坐标
一般设计人员在pcb设计时使用英制单位,而在pcb设计完成后,我们需要导出坐标文件用于贴片厂进行贴片;有的板厂要求导出的坐标文件为公制单位,切换单位会比较麻烦且容易产生DRC错误或者误差,因此,Fanyskill脚步提供一键输出公制坐标

三坐标和激光跟踪仪的不同之处
激光跟踪仪和三坐标测量机(CMM)是工业领域两大高精度测量设备,但它们在原理、适用范围和典型场景上存在显著差异。下面从核心区别与应用领域两方面进行系统分析:一、核心区别对比1.测量原理与工作方式激光

三坐标测量机精度保障,尽在蔡司三坐标代测服务套餐
的ZEISSMetrologyCare蔡司三坐标测量机年度服务套餐致力于为您的计量工作保驾护航。ZEISSMetrologyCare蔡司三坐标测量机年度服务套餐是一项专为三坐标测量机用户

蔡司三坐标厂家带你探索精准测量的奥秘
在精密制造领域,测量精度直接影响产品质量与性能。作为全球光学与光电技术先驱,蔡司自1973年推出全球首台三坐标测量机UMM500以来,始终以突破性的技术重新定义工业测量标准。本文将深度解析蔡司三坐标




评论