 fNIRS作为闭环神经反馈系统其可靠性若何?
fNIRS作为闭环神经反馈系统其可靠性若何?

fNIRS 在神经康复中的传统应用
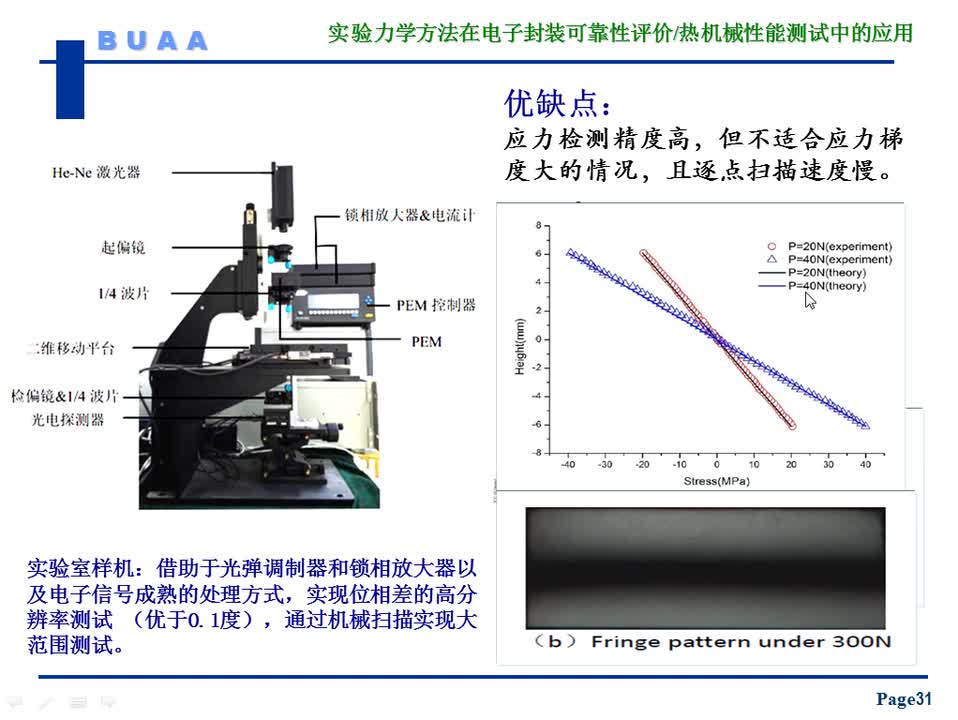
fNIRS(功能性近红外光谱)作为一种非侵入性脑功能成像技术,在神经康复中具有三大核心优势:无电磁干扰(可与机器人设备同时使用)、身体限制小(患者可自由移动)、操作简便且成本较低。这些特点使其特别适用于康复环境中的长期脑活动监测。传统上,fNIRS 被广泛用于评估中风患者康复过程中的脑功能变化,例如在执行手部抓握、手指敲击等精细运动任务时,通过测量运动皮层中氧合血红蛋白(HbO)和脱氧血红蛋白(HbR)的浓度变化来反映神经激活状态。如图1所示,典型的fNIRS康复实验设置包括视觉任务界面、定制化康复机器人系统与fNIRS脑成像设备,探头通常布置在左半球运动皮层(涵盖PMC、SMA与M1区),通过实时监测HbO/HbR信号,为康复训练提供神经反馈,从而个性化调整训练参数,提升患者参与度与康复效率。
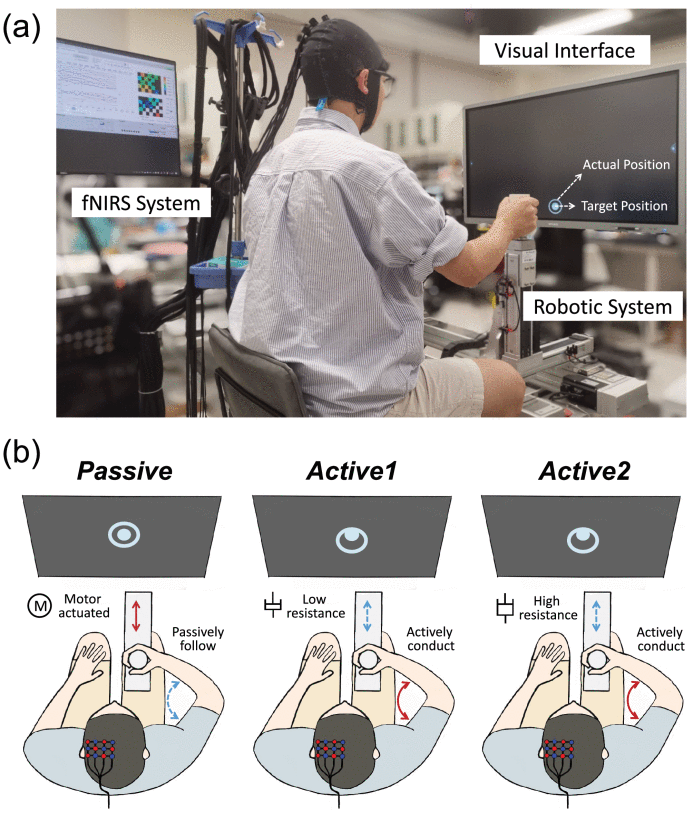
图1: 实验设置与任务模式示意图
图1清晰地展示了整个研究的实验平台和任务设计。图1(a)为系统集成图,包含了三个核心部分:提供视觉引导的界面、定制化的上肢康复机器人(带力传感器)以及fNIRS脑成像系统(佩戴于被试头部)。这体现了多模态康复评估系统的典型配置。图1(b)为任务模式图解,直观地比较了三种机器人辅助模式:
Passive模式:机器人完全驱动,用户无需主动发力,代表低强度训练。
Active1模式:用户需主动运动以克服1.0 N·s/cm的阻力,使空心圆(实际位置)跟随实心圆(目标位置),代表中强度训练。
Active2模式:与Active1类似,但阻力增大至3.3 N·s/cm,代表高强度训练。
HUIYING
fNIRS 跨会话可靠性概述
跨会话可靠性是指fNIRS在不同时间点的测量结果是否一致,这对于长期康复疗效评估至关重要。传统fNIRS研究多集中于非运动任务(如视觉/听觉刺激)或精细运动任务(如手指对抗),这些场景下fNIRS已显示出良好的跨会话可靠性(ICC最高达0.84)。然而,在机器人辅助康复这类涉及粗大运动且训练参数多变的环境中,跨会话可靠性的验证仍显不足。为了将fNIRS适配于这类场景,需确保探头布置的标准化与信号处理的鲁棒性。例如,图2展示了通过fOLD工具箱 与蒙特卡洛模拟优化的探头排列,确保通道覆盖左半球运动关键区域,并通过敏感性剖面图验证其测量有效性,从而在不同会话中保持信号捕获的一致性。
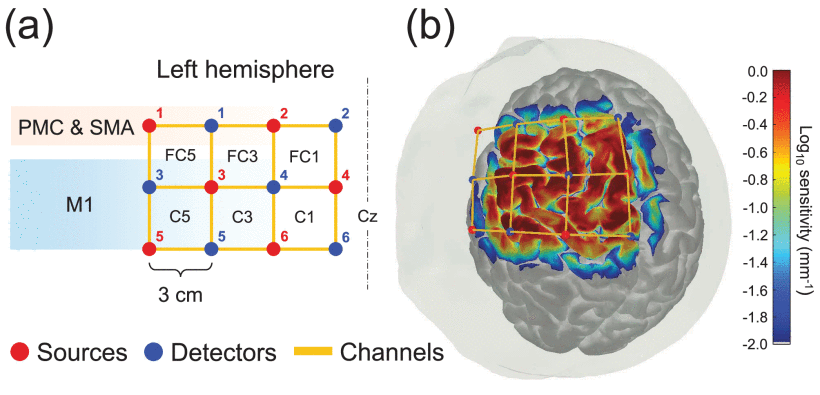
图2: fNIRS通道布置与脑区敏感性剖面图
图2展示了fNIRS的探头布局及其对目标脑区的测量能力。图2(a)显示了根据10-5国际系统在头皮表面布置的6个光源和6个探测器,形成了17个测量通道(探头间距3cm),覆盖了左侧半球的运动前区、辅助运动区和初级运动区。图2(b)通过蒙特卡洛模拟生成的敏感性剖面图,以热力图形式直观地证明了上述通道安排能够有效地探测到目标脑区(尤其是初级运动皮层)的血液动力学响应。这为后续观测到的可靠脑激活提供了技术可信度。fOLD负责“战略部署”,告诉我们在哪里布阵;而蒙特卡洛模拟负责“战术验证”,确认我们的阵型能有效打击目标,并剔除那些“火力”不足的单元(通道)。
HUIYING
临床研究
方法
本研究采用了一项基于健康受试者的实验性临床研究方法,旨在系统评估fNIRS在机器人辅助上肢粗大运动训练中的会话内可靠性。十名右利手参与者在定制康复机器人上执行右肘伸展-屈曲任务,依次经历完全被动、低阻力主动和高阻力主动三种模式,以模拟临床康复中不同强度的训练阶段。整个实验会话包含三个相同的运行块,其间设有充分休息。采用经fOLD工具箱优化设计、并通过蒙特卡洛模拟验证的fNIRS探头排布,确保信号精准采集自左侧运动皮层。随后,对获取的原始光信号进行预处理并转换为血红蛋白浓度变化,采用自回归迭代稳健最小二乘法模型估计血液动力学响应函数,最终通过计算组内相关系数、决定系数及空间重叠度等指标,综合评估其时间和空间维度的会话内可靠性。
参与者:10名健康成人,执行机器人辅助右肘伸展-屈曲任务。
训练模式:
Passive:全机器人驱动
Active1:低阻力主动运动
Active2:高阻力主动运动
fNIRS采集:24源-24探测器系统,17通道覆盖左运动皮层,采样率10.4 Hz。
数据分析:
预处理(去噪、滤波、HRF估计)
可靠性评估:
空间可靠性:R²(图4散点图)与R_overlap
时间可靠性:ICC(图5雷达图)评估5类时间特征
结果
原始数据质量:SCI与PP值均超阈值(图3),表明信号质量良好且运行间无差异。
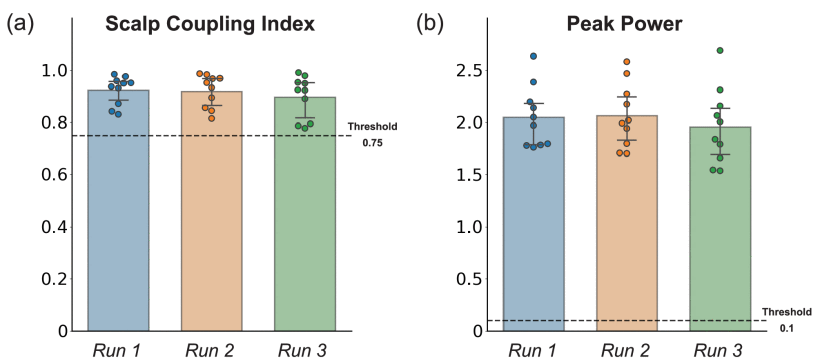
图3: 各运行间原始信号质量指标对比图
图3通过头皮耦合指数(SCI) 和峰值功率(PP)两个指标,评估了三个运行中原始fNIRS信号的质量。结果显示,所有运行的SCI平均值(~0.92)和PP平均值(~2.03)都远高于公认的阈值(SCI>0.75, PP>0.1)。更重要的是,单因素方差分析表明三个运行之间的信号质量没有显著差异。
空间可靠性(图4):
组水平优秀(R² > 0.75,R_overlap > 0.75)
个体水平公平至良好(R²: 0.44–0.69,R_overlap: 0.44–0.68)
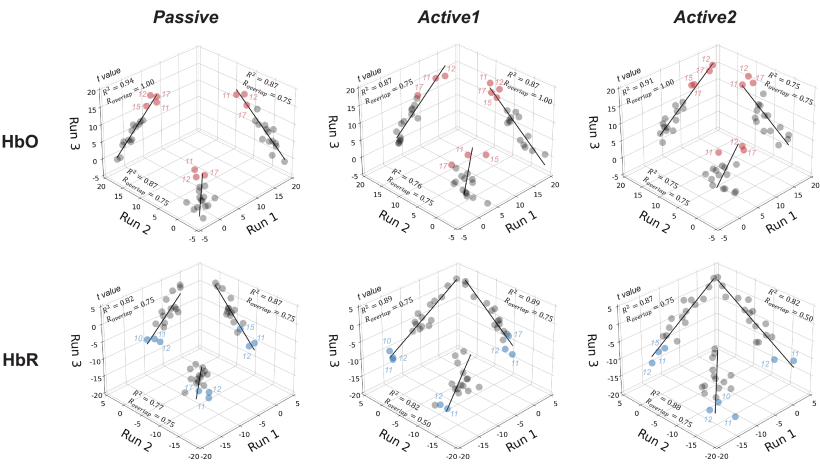
图4: 组水平空间可靠性评估散点图
图4通过三维散点图评估了组水平的空间可靠性。每个点代表一个通道在两个运行中的T值。可以看出:所有数据点都紧密分布在对角线(y=x)附近,表明不同运行间各通道的激活强度高度一致。决定系数R² > 0.75,说明一个运行的激活模式可以很好地预测另一个运行的激活模式,即组水平的图谱间可靠性极佳。重叠度R_overlap 值很高(HbO: 0.75-1.00; HbR: 0.50-0.75),表明最活跃的通道(图中标红的Top 4通道)在不同运行间高度可重复。
时间可靠性(图5):
Slope、Max/Min、Mean 在多数模式下ICC为0.60–0.86(良好至优秀)
但在Active2模式下HbO可靠性下降(ICC: 0.36–0.41),可能与疲劳有关
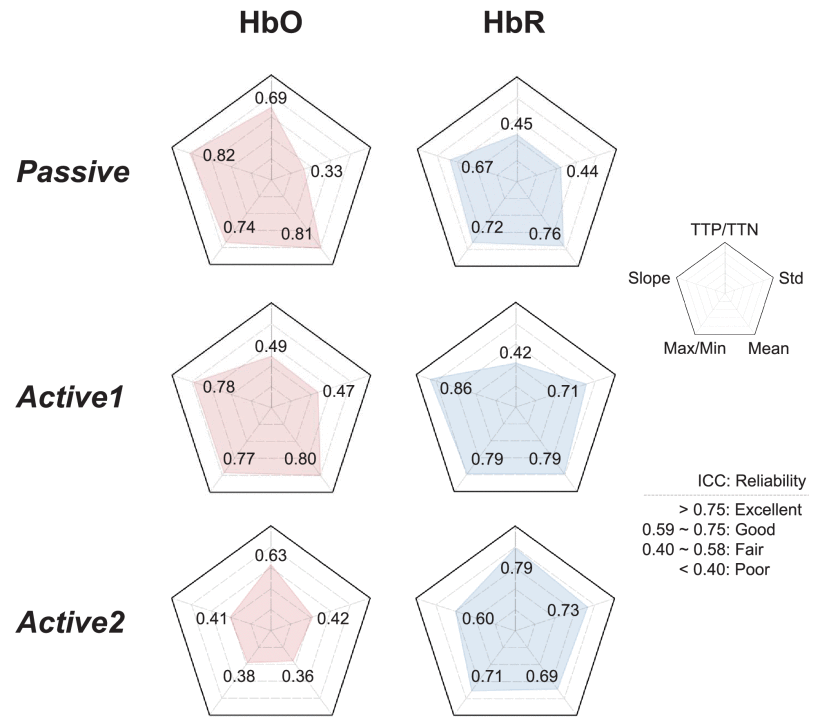
图5: 各时间特征的会话内时间可靠性雷达图
图5使用雷达图综合展示了五个关键时间特征(TTP/TTN, Slope, Max/Min, Mean, Std)在三种模式下的组内相关系数(ICC),即时间可靠性。可靠性等级:在Passive和Active1模式下,Slope, Max/Min, Mean 三个特征的ICC普遍在0.60-0.86之间,达到良好至优秀水平。模式差异:Active2模式下的HbO可靠性显著降低(ICC<0.41),而HbR的可靠性依然良好。特征差异:TTP/TTN和Std的可靠性普遍较低,表明这些特征在不同运行间的一致性较差。
激活模式:左M1背侧区域激活最强(图6),且随训练强度增加而增强。
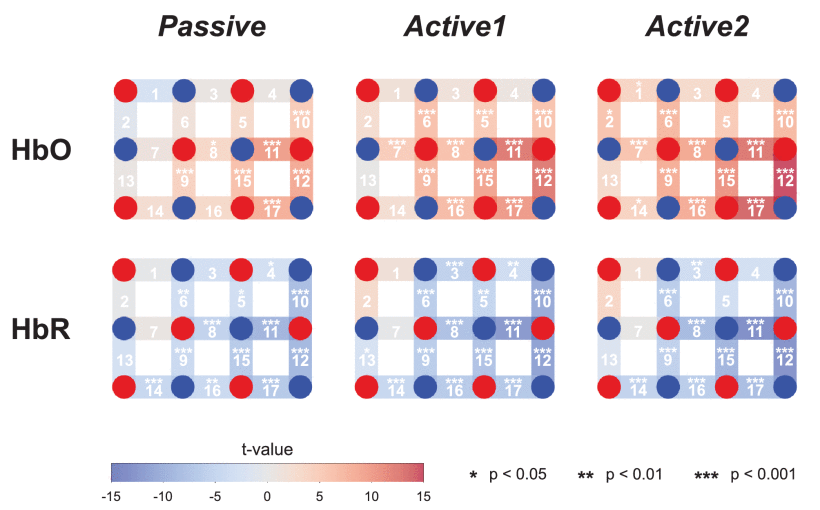
图6: 不同训练模式下的组水平脑激活T图
图6以T统计值地形图的形式,展示了在三种训练模式下,组水平上HbO和HbR的脑激活空间模式。可以清晰地观察到:激活区域:最显著的激活集中在左半球初级运动皮层的背侧区域(如通道#11,#12,#17)。模式效应:主动模式(Active1, Active2)的激活强度显著高于被动模式(Passive),表现为T值的绝对值更大。强度梯度:激活强度基本遵循 Passive < Active1 < Active2 的梯度,表明fNIRS信号对训练强度敏感。
HUIYING
总结
本研究系统验证了fNIRS在机器人辅助上肢粗大运动训练中的会话内可靠性。结果表明:
fNIRS在个体水平具有公平至良好的空间可靠性与良好至优秀的时间可靠性;
可靠性随训练强度提升而增强(Passive < Active1 < Active2),但在高强度模式下HbO可靠性可能因疲劳而下降;
左M1背侧区域为最可靠测量区域,支持少数通道布置的临床可行性。
这些发现为fNIRS作为闭环神经反馈系统的核心组件提供了实证基础,推动了其在个性化、自适应康复机器人系统中的实际应用。未来需在患者群体中进一步验证,并优化休息策略以减轻疲劳影响。补充:基于本研究验证的fNIRS会话内可靠性,可构建一个精简的闭环神经反馈系统:该系统通过置于患者运动皮层的少数fNIRS通道,实时提取并分析血红蛋白浓度变化的斜率与幅值等可靠时间特征;据此,系统实时判断患者的大脑参与度,并动态控制康复机器人自动调节辅助力度或运动阻力——在参与度充足时增加挑战,不足时则降低难度,从而形成一个以患者大脑状态为核心的自适应训练循环,实现个性化康复。
-
机器人
+关注
关注
213文章
31444浏览量
223669 -
医疗电子
+关注
关注
31文章
1462浏览量
92224
发布评论请先 登录
可靠性是什么?
【可靠性分析第一步】构造可靠性模型
电源作为系统核心,如何保证其可靠性?
电源作为系统核心,如何保证其可靠性?
【转帖】电源作为系统核心, 如何保证其可靠性?
电源作为系统核心,如何保证其可靠性?
高频开关电源双闭环反馈并联系统
单片机应用系统的可靠性与可靠性设计
闭环负反馈系统设计原理




评论