 从高精地图到轻地图,再到“无图”,谁才是真需求?
从高精地图到轻地图,再到“无图”,谁才是真需求?

[首发于智驾最前沿微信公众号]如果将自动驾驶发展以时间轴拉开,地图的应用可以分为高精地图、轻地图,以及所谓的“无图”或“模型化地图”三个阶段。高精地图强调精细度,具备厘米级定位和丰富的语义标注,适合对车道、路径和几何特征有强依赖的场景;轻地图则按功能裁剪,只保留车道关系和关键拓扑,其更加追求迭代速度和成本效益;“无图”更侧重实时感知与模型推断,利用端侧或云端的大模型、视觉算法,在运行时动态重建场景,或直接从感知结果推导出行车策略。同样是完善自动驾驶汽车提供精确道路信息,地图领域为什么会演化出这么多的技术方向?
图片源自:网络

高精地图,高成本投入下的最优方案
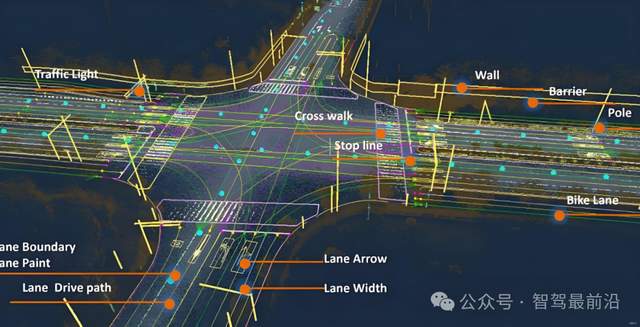
想象一下,一辆汽车在高速公路上以超过100公里/小时行驶时,自动驾驶系统若能提前获取匝道位置、曲率变化、坡度、限速等信息,就能为感知和决策争取更多时间,减轻对瞬时感知的依赖,高精度地图就是提供这些信息的完美载体。高精地图的核心就在于“高精”二字,其包括车道级拓扑、车道中心线、宽度、路沿、交通标志与信号的精确位置,还有斜率、曲率、道路粗糙度、静态障碍物及地标(如电线杆、路缘石、广告牌)等关键道路信息。这些信息不仅可以帮助定位模块实现厘米级姿态估计,也能为预测与规划模块提供先验知识。
图片源自:网络
想制作一张高精地图,高精度测绘技术是必不可少的。一张高精地图需依赖多线激光雷达、RTK级GNSS、惯性测量单元(IMU)及高分辨率摄像头等传感器组合,并经过点云配准与语义标注、道路拓扑构建以及地图匹配算法等一系列后处理流程后才能生成。定位环节一般融合GNSS/INS与基于特征的匹配(如将激光点云或视觉特征与地图中的地标对齐),并采用卡尔曼滤波、粒子滤波或图优化等方法维持稳定性。要实现“厘米级”精度,测绘阶段的传感器标定、时间同步,以及后端的误差建模都至关重要。
高精度地图涵盖非常多的道路信息,对自动驾驶汽车来说是非常友好的,但在自动驾驶的演变中,却因成本高、维护难,被越来越多车企不看好。采集车需配备昂贵硬件,标注也需要大量人工参与;道路一旦变化(如施工、标线重画),地图就容易失效,频繁更新进一步推高了成本。对于广域覆盖,尤其是交通变化频繁的城市道路,完全依赖高精地图的商业模式很难持续。因此,它更多被用于高速、固定路线或对安全冗余要求高的场景,而没有作为通用方案覆盖所有路况。

轻地图,实用主义的折中之选
轻地图的出现,正是在成本与部署效率考量后的折中选择。它不再精确刻画每一处路面细节,而是保留对驾驶决策最有用的如车道连通关系、关键路口与匝道位置、重要交通控制要素的大致位置,以及用于快速定位的若干地标点等关键要求。由于信息量减少,采集与标注成本下降,云端存储和分发也更便捷,更新频率得以提高,更适合城市NOA这类需要大范围覆盖、又不能高频投入测绘的场景。
图片源自:网络
实现轻地图的关键,在于从庞杂的道路信息中,精准提取出那些对驾驶决策最有价值的要素,并将它们转换为独立的功能模块。它更依赖多源数据融合与自动化标注流程,像是车队感知数据、众包轨迹、摄像头识别的交通标志与车道边界等数据,都可用来自动生成或更新地图。实时性与可更新性是轻地图的优势,当某条道路发生变化,云端可通过流量异常、车队上报或短时采集完成修正,这远比高精地图的人工复核流程更快。
轻地图虽然对定位仍有要求,但容忍度更高,它无需精确到单条车道中心的厘米级,只需确保车辆处于正确的车道或车道集合内即可。正因如此,自动驾驶系统的工作重心必须放在提升车端感知与控制能力上,地图仅提供“宏观规则”与“拓扑先验”,具体位姿则由感知算法实时确认。
这种模式扩展性强、成本低,但短板也很明显。像是在如狭窄工地、临时改道、无标线乡路等复杂或极端场景下,缺少精细地图支持会加大系统对实时感知与决策算法的依赖。

无图/模型化地图,“无”在何处?
当车企宣传“无图NOA”时,很多人会认为完全不用地图,但事实并非如此。“无图”其实是指摒弃传统的事先测绘、静态存储、人工维护的高精地图体系,转向基于感知与大模型的实时推断,从而确定路面情况。换句话说,就是地图的形态从外在、静态的数据层,转变为内嵌于算法中的“隐式知识”,或在运行时即时重建的短期地图。
图片源自:网络
现阶段,无图/模型化地图的实现方式有两种,一种是通过端侧或云端的视觉与多模态模型,直接从摄像头、雷达数据中推断车道、交通参与者轨迹与拓扑关系,并做出驾驶决策;还有一种是以轻地图为基底,由模型在线重建局部几何与语义,用短期地图(如几百米范围、几十秒时效)替代大范围高精地图。两者都需要依赖强大的感知能力、低延迟计算与高鲁棒性的模型验证。
“无图”方案的优点是部署快、成本低、适应环境变化能力强,但它也将更多“地图责任”转移给了感知与推理算法。这意味着,一旦感知系统在极端光照、雨雪或复杂遮挡下出现退化,系统将失去先验冗余,风险也会随之上升。
“无图”并非彻底抛弃地图,而是将其形态与角色转向更灵活、时效更强的形式。即便未来端到端大模型普及,显式或隐式的地图要素仍会以某种形式存在或作为轻量先验保留在系统架构中。

哪个才是最优解?
高精地图的实现离不开采集、标注和更新三项关键技术,采集需投入配备高端传感器的测绘车队及专业人员;标注则依赖大量人工与质量把控,尽管自动化标注技术提升了效率,但在语义准确性与极端场景覆盖上仍需要人工复核;更新则涉及分发系统、兼容性、差分更新技术及用户设备的回传带宽等问题。
在高速公路与受控路线场景中,高精地图优势非常明显,且成本可被摊薄。固定路线车辆(如城际班线、物流车队)能长期复用同一段高质量地图,从而将一次性测绘成本分摊到大量行驶里程中。在这些场景下,高精地图能提供显著的安全冗余与体验提升。
图片源自:网络
而在城市复杂路网中,轻地图与强感知的组合会更为有利。城市路况变化快,临时施工、路口改造频繁,完全依赖高精地图,其成本与滞后性会成为全面铺开的主要阻碍。轻地图提供宏观拓扑与规则,感知与规划则负责短期、局部的精细决策。对于追求量产与广域部署的NOA能力,这种方式更易实现商业化。

最后的话
对车企与用户而言,地图的价值不在于“存不存在”,而在于“好不好用”。若为削减成本而舍弃地图,导致体验下降或安全裕度降低,并非明智之举。相反,将地图作为优化体验、降低系统总成本、提升安全冗余的工具,才是合理选择。轻图与无图代表着行业在成本与扩展性上的进化,而高精地图在需要时依然是最可靠的后盾。高精度地图、轻地图与无图,并非此即彼的单项选择。
审核编辑 黄宇
-
自动驾驶
+关注
关注
795文章
15082浏览量
182146 -
大模型
+关注
关注
2文章
3895浏览量
5322
发布评论请先 登录
从高精地图到无图,智驾企业为什么要这么做?为什么敢这么做?

为什么无图智驾不使用SLAM建立局部语义地图?

百度地图LD解决方案助力无人配送行业规模化落地
为什么自动驾驶方案不再强调地图了?

自动驾驶中的“无图”真的不需要地图吗?

隐式地图:自动驾驶的“数字直觉“

得一微YEESTOR eMMC实现高精地图高效存储
什么样的地图在自动驾驶中才能称为“轻图”?

从“有图”到“无图”再到“轻图”,自动驾驶地图选择为何这么折腾?




评论