 吉林大学,辽宁材料实验室:具有交叉梯度结构的仿生柔性压阻传感器,可实现高性能触觉感应
吉林大学,辽宁材料实验室:具有交叉梯度结构的仿生柔性压阻传感器,可实现高性能触觉感应

通过扩展和集成单个传感器,实现了对多触觉信息的高精度感知和有效的人机交互。柔性电子技术的进步正在推动从传统的刚性传感器架构向具有生物相容性、皮肤适应性和多功能集成的系统过渡,克服了表皮兼容性和曲面适应性的局限性。与适应性有限的传统刚性传感器相比,柔性传感器的发展显著扩大了传感技术的潜在应用。凭借其卓越的灵活性和适应性,柔性传感器可以模仿甚至超越人类皮肤的触觉传感功能,紧密适应各种不规则表面,以提供更精确的传感能力。这些独特的特性使柔性传感器能够在可穿戴设备、医疗监测、机器人皮肤和其他领域显示出广泛的潜在应用。
触觉感知是一个关键的感知模块,用于实现人类和机器人与环境之间的精确交互。近年来,研究人员一直在积极探索新材料、触觉敏感微结构和响应机制,以解决柔性触觉传感器在性能和应用方面面临的挑战。目前,已经开发了几种类型的柔性触觉传感器,包括压阻式、电容式、压电式、摩擦电式、磁性和光学响应机制。其中,压阻式触觉传感器因其稳定性高、结构简单、易于集成而得到了广泛的研究。尽管取得了重大进展,但在实现柔性触觉设备的高效感知和响应稳定性方面仍存在关键挑战。例如,当前的触觉传感器通常难以同时实现高灵敏度、宽检测范围和低检测限。最佳检测模式应在低压区域结合高灵敏度和低检测限,同时在高压区域保持稳定的信号输出特性和宽动态范围,这将显著扩大其在不同场景中的应用潜力。此外,在器件制造过程中,导电材料和柔性基板之间的弱界面结合在循环负载下极易发生接触失效,导致信号漂移或导电网络断裂,严重损害信号输出和长期稳定性。
特别是,感测层中微结构形状和分布的设计是提高触觉传感器检测范围和灵敏度的关键因素。目前,微观结构设计包括传统的几何形状(例如,金字塔、柱状、多孔结构等),还涉及仿生自然表面特征结构(例如,模仿甲虫、珍珠层、玫瑰花瓣、荷叶、蝉翼和猫舌。这些微结构通常使用3D打印、牺牲/仿生模板方法、光刻和静电纺丝等技术进行设计。由于其卓越的精度和形状适应性,3D打印技术能够精确制造具有复杂几何形状的微结构。因此,它已成为微结构制造中最常用和最有效的技术之一。然而,常用的压敏弹性体材料,如PDMS和Ecoflex,由于其模量特性,通常会导致脱模缺陷、微观结构损坏和压缩回弹滞后等问题,从而引发界面粘附效应。此外,多步成型工艺可能会导致微观结构形态的累积变形,从而导致灵敏度降低、基线漂移,甚至器件的功能失效。除了微观结构优化,引入高性能电极材料也是提高传感器性能的有效策略。例如,碳基纳米材料、金属纳米材料、MXene和导电聚合物因其优异的导电性、机械性能和柔韧性而被广泛用于制备柔性传感器。这些材料可以有效地与柔性基板(如PDMS、PET、PI等)集成,以确保有效的电路传导和稳定性。特别是,MXene表现出优异的导电性和可调的表面特性,使高性能和柔性器件之间能够完美兼容。MXene基导电油墨与微电路印刷技术的集成实现了室温下高精度和高效率的电路制造,增强了传感器的可扩展性和一致性。
本文亮点
1. 本工作受蛇鳞结构布置的启发,构建了一种具有交叉倾斜梯度(CTG)架构的创新柔性触觉传感器。
2. 该传感器通过超密集传感点设计和多梯度结构补偿机制的协同效应,实现了2.116 kPa−1的高灵敏度和511.11 kPa的宽检测范围。
3. 通过界面兼容性设计和等离子体表面处理,使用柔性电子直写系统在室温下制备了具有高摩擦阻力、高导电性和强界面粘附性的MXene/PET电极。
4. 仿生传感器具有出色的响应特性(响应时间为8ms)、长期运行稳定性(>8500次循环),并且没有明显的信号漂移。其出色的灵敏度使其能够全面感知人体姿势。
5. 通过扩展和集成单个传感器,实现了对多触觉信息的高精度感知和有效的人机交互。
图文解析
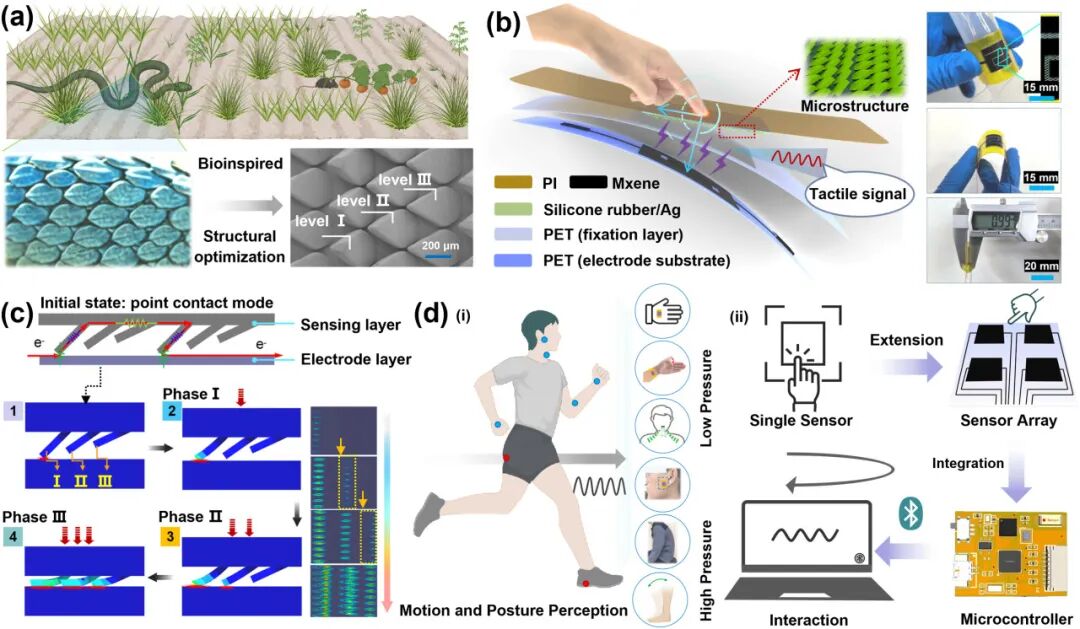
图1. CTG仿生触觉传感器的设计和应用示意图。(a)仿生和微结构设计。(b)CTG压力传感器的组成和结构示意图。(c)反应机制。(d)多种场景下的感知应用。
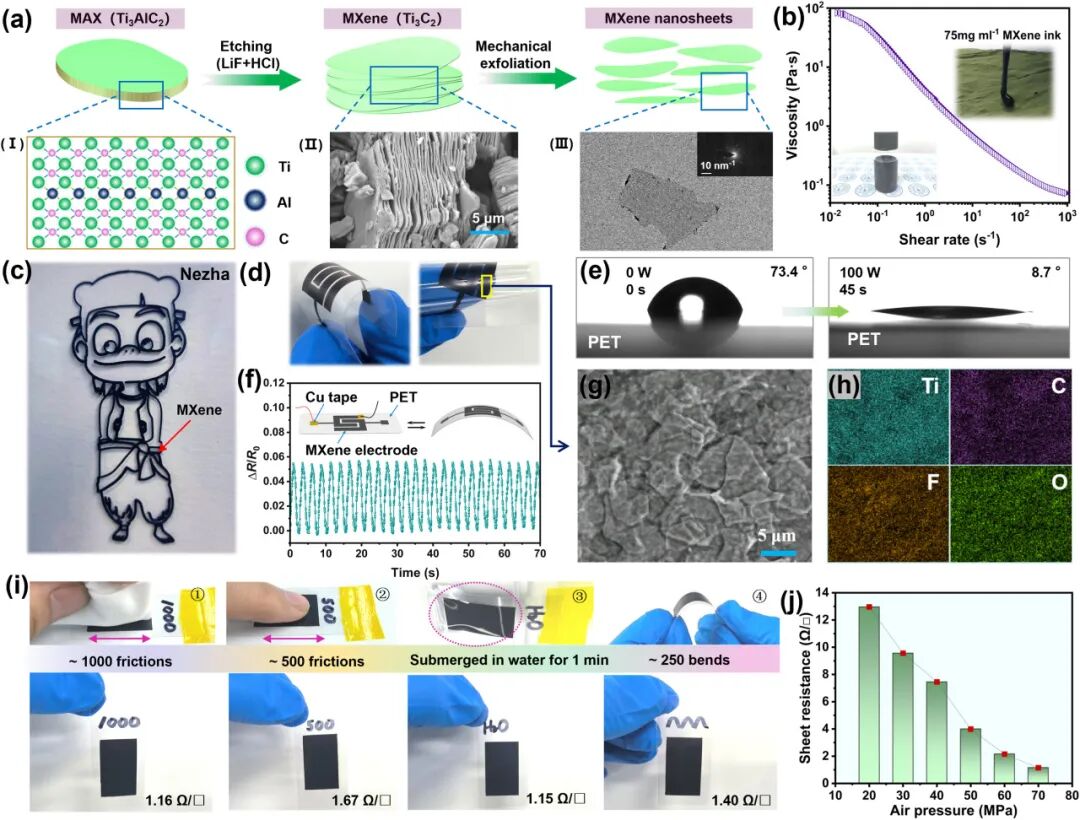
图2. PET基MXene叉指电极的制备和表征。(a)使用HCl和LiF从MAX相材料蚀刻Al原子的MXene制造工艺示意图。一MAX结构图。(Ⅱ)具有手风琴状多层结构的Ti3C2。(三)MXene纳米片。(b)75 mg/mL MXene油墨的粘度特性。(c)以复杂线条为特征的MXene图案。(d)印刷在PET基板上的MXene交叉指型电极的光学照片。(e)PET基材经亲水处理后的接触角变化。(f)PET基MXene叉指电极的应变循环稳定性。(g)MXene薄片均匀堆叠的电极路径。(h)图2g中MXene电极的EDS元素映射图像,包括Ti、C、F和O。(j)不同印刷参数下MXene电极的电导率。
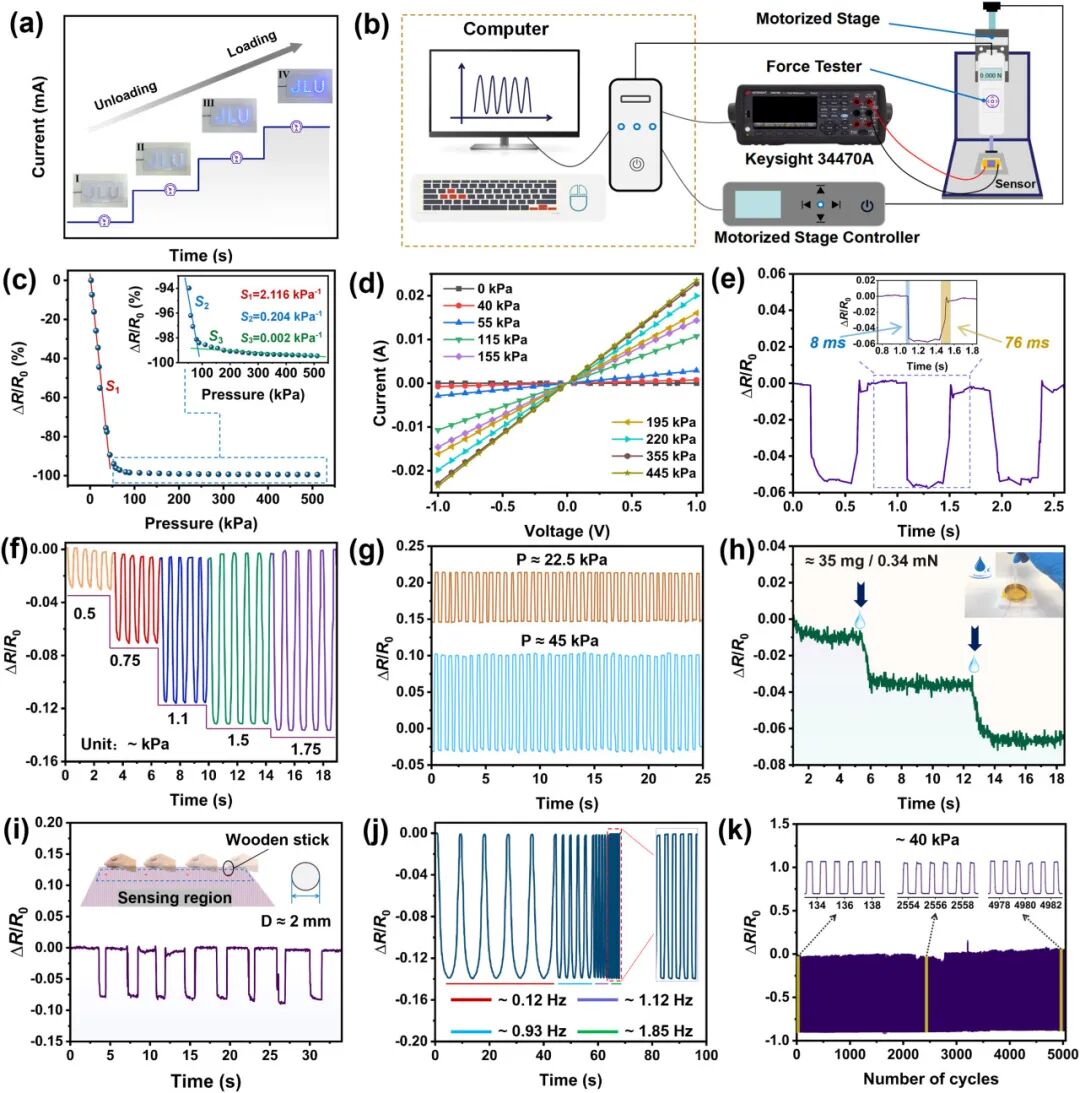
图3. CTG柔性触觉传感器的压力传感性能。(a)基于CTG传感器的触觉开关。(b)电信号测试系统。(c)CTG传感器的电阻信号与压力变化曲线。(d)特定压力(0-445 kPa)下传感器的I-V关系。(e)CTG传感器的响应和恢复时间。(f)可变压力下CTG传感器的动态响应特性。(g)传感器在约22.5 kPa和45 kPa下的循环稳定性。(h)CTG传感器对一滴水(约35mg)引起的相对电阻变化做出响应,显示出非常低的检测限。(i)不同感测区域小规模接触刺激下的电阻响应。(j)CTG传感器在连续可变频率下的信号输出性能。(k)CTG传感器在40 kPa相对压力下的稳定性测试约5000次循环。
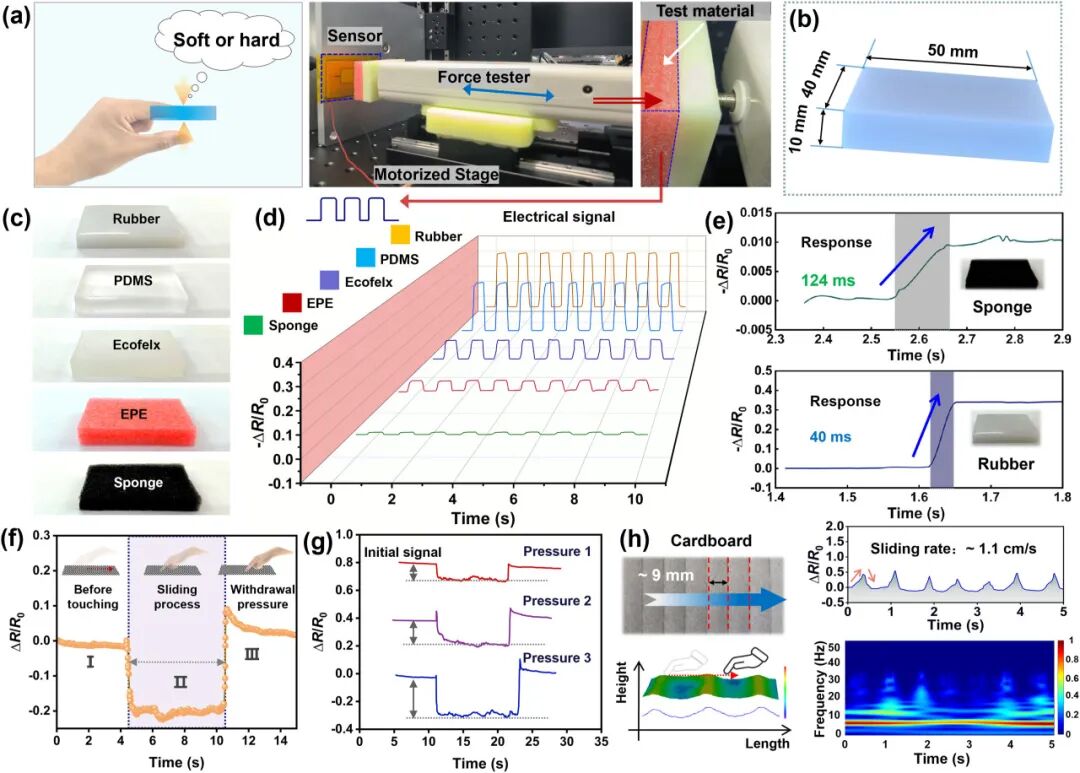
图4. 基于压力传感的柔软度和滑动识别。(a)柔软度和硬度测试平台。(b–c)5种材料(50 mm×40 mm×10 mm)的光学照片,包括橡胶、PDMS、Ecoflex、EPE和海绵。(d)为样品生成的电阻波形曲线。(e)海绵和橡胶产生的电阻信号的时域特性差异。(f)传感器在随机滑动速度下的整个信号交互过程。(g)三种不同接触压力下的滑动特性信号:压力1<压力2<压力3。(h)CTG传感器在具有规则结构的纸板上以约1.1 cm/s的速度滑动产生的时域信号。

图5. CTG传感器能够实现运动/姿势传感的全范围压力检测,覆盖从低压到高压区域的宽响应范围。(a)手掌连续打开和关闭期间的电阻信号变化。(b)检测拇指屈伸运动引起的手腕局部肌肉区域的小位移变化。(c)手臂肌肉的运动检测。(d)连续检测手动单次、双次和三次按压塑料瓶产生的传感器电信号。(e)探测深呼吸引起的微弱喉部信号。(f)张开和闭合口腔时TMJ活动触发的电信号响应。(g)脚部运动检测。(h)实时监测坐姿变化。
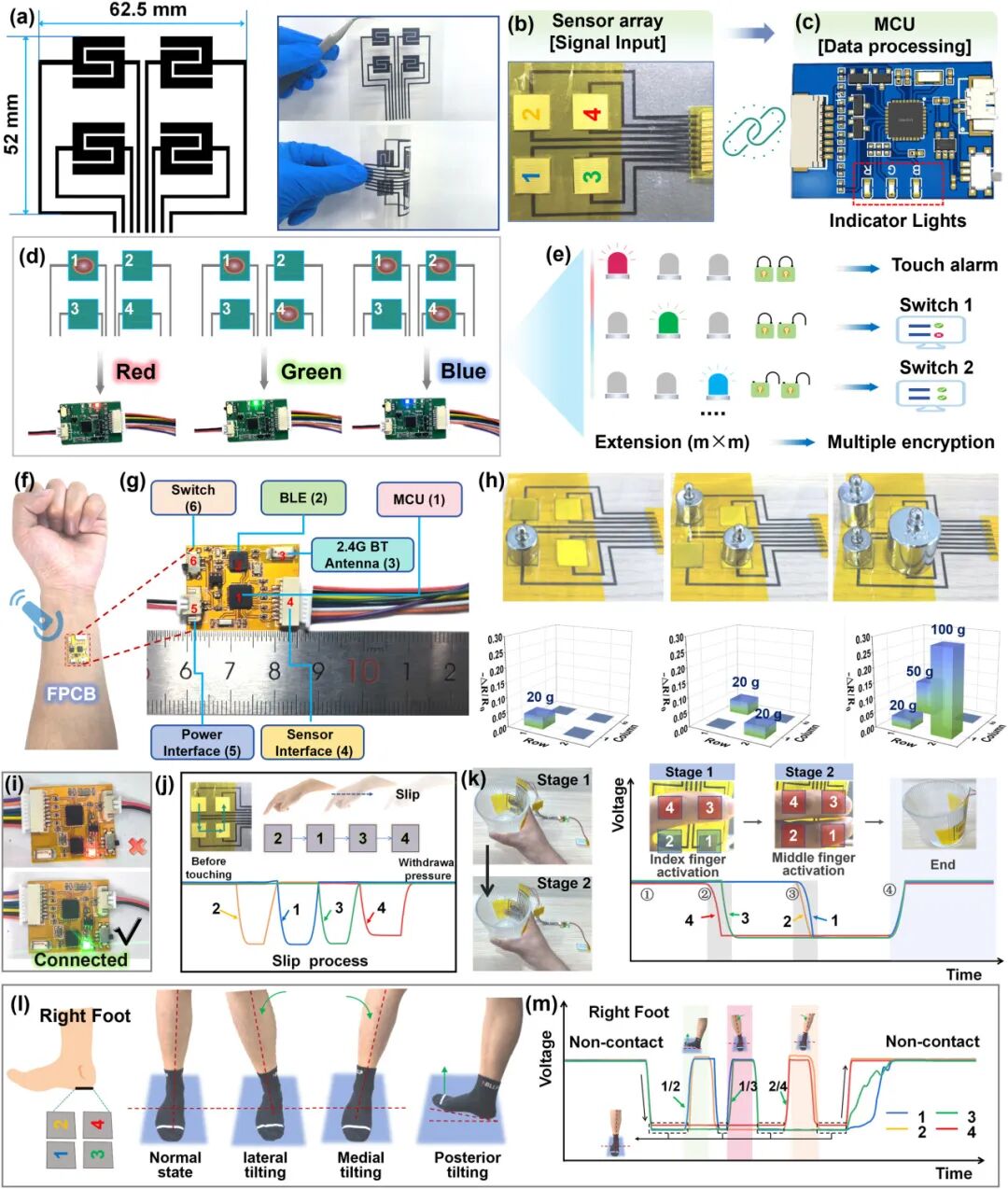
图6. 用于人机交互的触觉传感器。(a)2×2 MXene电极阵列的光学图像。(b)CTG触觉传感器阵列,带有四个标记为1-4的触觉开关。(c)微控制器单元(MCU)。(d)基于多通道触觉开关控制的LED灯交互应用。(e)多个触觉开关,用于安全加密应用。(f–g)FPCB集成了蓝牙无线传输功能,配备了四通道传感器接口。(h)不同重量的传感器阵列产生的压力分布。(i)控制模块的操作模式。(j)手指分别在传感器2、1、3和4上滑动的响应曲线。(k)握住水杯时触发的四个传感器的信号响应曲线。(l–m)脚姿势的识别。
来源:柔性传感及器件
-
触觉传感器
+关注
关注
4文章
130浏览量
10446 -
仿生传感器
+关注
关注
1文章
15浏览量
3056 -
柔性传感器
+关注
关注
1文章
122浏览量
4882
发布评论请先 登录
安徽工程大学、西湖大学:仿生触觉传感器新突破,实现高精度跨域目标识别

“触达未来 链动产业” 大深传感AI柔性仿生触觉传感器新品发布会在惠阳成功举办

北京理工大学与中国科学院:研究自适应模量压力传感器阵列,赋能无线触觉可视化

西湖大学:研发CMOS兼容压力传感器阵列,实现精准触觉感知功能
机房/仓库/实验室专属:网络温湿度传感器,环境安全一手握
中科院/重庆大学:仿生“电子皮肤”获突破!梯度模量设计让传感器实现“宽压域、高灵敏、抗漂移”

天合光能高纪凡受聘出任吉林大学校友会第四届理事会副会长
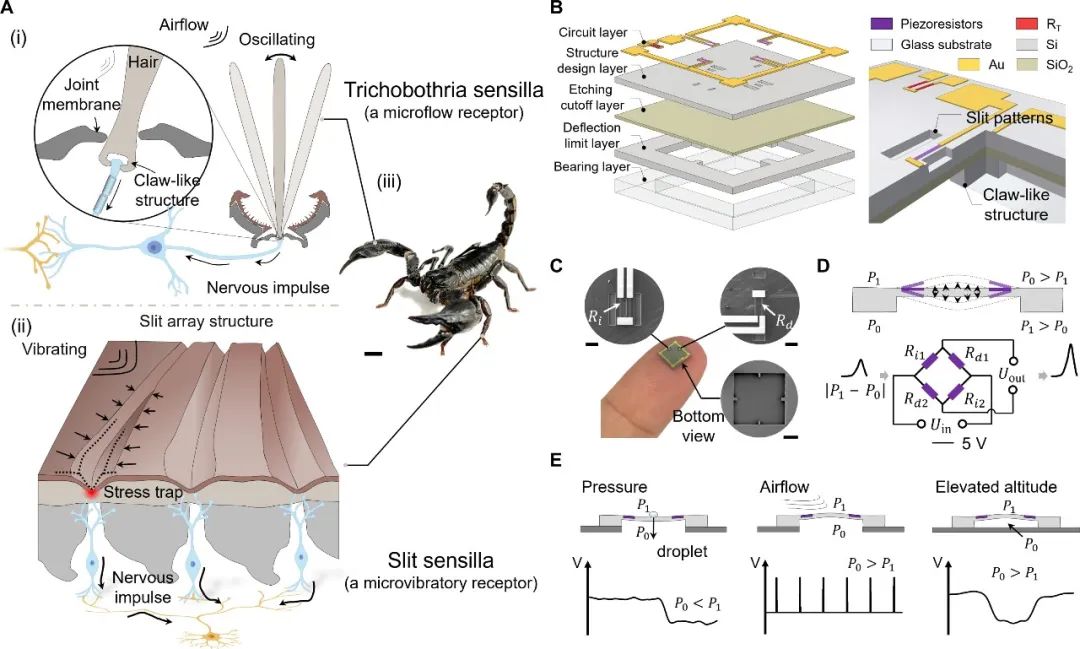
吉林大学和美国加州大学伯克利分校:研究用于智能机器人近体流动检测的超灵敏仿生压力传感器
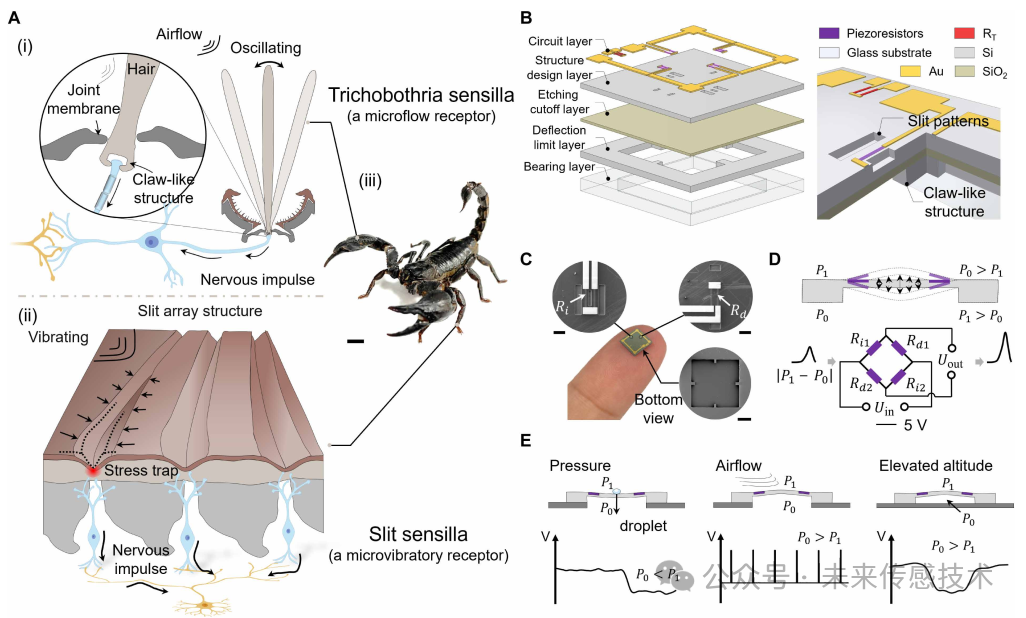
吉林大学,加州大学伯克利分校:受蝎子机械传感机制启发的超灵敏压力传感器,用于智能机器人的近体流动
大连义邦Nanopaint压感油墨为智能各向异性压阻传感器提供解决方案

具身智能机器人在检验检测实验室应用的技术路径探讨



评论