 中科院/重庆大学:仿生“电子皮肤”获突破!梯度模量设计让传感器实现“宽压域、高灵敏、抗漂移”
中科院/重庆大学:仿生“电子皮肤”获突破!梯度模量设计让传感器实现“宽压域、高灵敏、抗漂移”

研究背景
在柔性传感与健康监测领域,实现宽压力范围、超高灵敏度与长期信号稳定性一直是技术难点。传统传感器在高负载下易出现结构硬化与信号漂移,限制了其在动态生物力学监测中的可靠应用。尽管已有研究通过微结构或梯度设计提升性能,但多数仍面临制备复杂、界面不稳定或反应不均等挑战。
文章简介
近日,中国科学院重庆绿色智能技术研究院、重庆大学等机构的研究团队在《ACS Sensors》上发表最新研究。
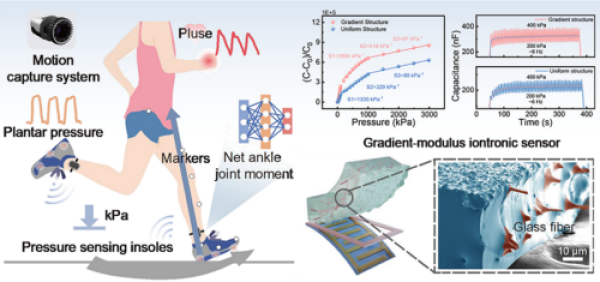
该团队受人体皮肤梯度模量结构启发,提出了一种梯度模量离子电子传感器(GMIS),通过将微结构离子凝胶与玻璃纤维增强基质结合,仅用两层结构即实现了0–3 MPa宽压域下的超高灵敏度(2904 kPa⁻¹)与低信号漂移(11.8%)。该传感器在动态负荷下表现出优异的稳定性,并可与卷积神经网络(CNN)结合,实现对踝关节力矩的高精度预测,相关系数超过0.91。
原文链接:
https://doi.org/10.1021/acssensors.5c02354
研究内容 01 梯度模量结构与工作机制
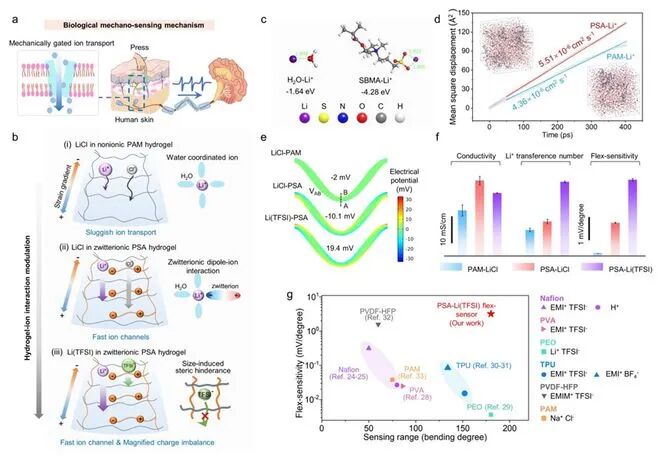
GMIS采用自上而下的模量梯度设计,软层优先变形以扩大接触面积,硬层逐步承压,延缓结构硬化,提升灵敏度与动态范围。

Fig. 1.GMIS的结构设计与工作机制
02
玻璃纤维增强与抗漂移机制
玻璃纤维与PVA链形成强氢键网络,显著抑制粘弹性蠕变,将信号漂移从均匀结构的62.28%降至11.8%,提升长期稳定性。

Fig. 2. GMIS结构与力学性能表征
03 传感性能与动态响应
GMIS在0–100 kPa范围内灵敏度达2904 kPa⁻¹,约为均匀结构的两倍;响应时间260 ms,恢复时间78 ms,适用于实时监测。

Fig. 3.GMIS的传感性能
04 多场景生理信号监测
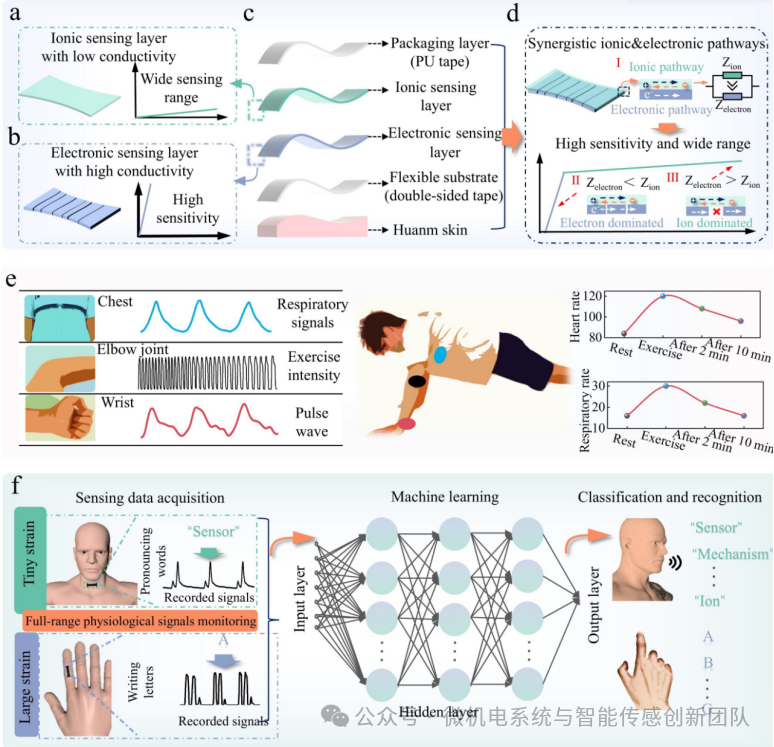
成功应用于脉搏、肌肉活动、吞咽、指关节弯曲等生理信号的实时检测,并构建八通道压力鞋垫系统,结合CNN实现踝关节力矩的动态预测。

Fig. 4. GMIS在人体运动信号监测中的应用
05 性能验证
在100 kPa下循环15000次仍保持稳定;
在3 MPa下循环3000次响应仅衰减8.5%;
CNN预测踝关节力矩的Pearson相关系数达0.91–0.93(行走/跑步)与0.87–0.91(跳跃);
温湿度变化下信号波动可控,具备良好环境适应性。
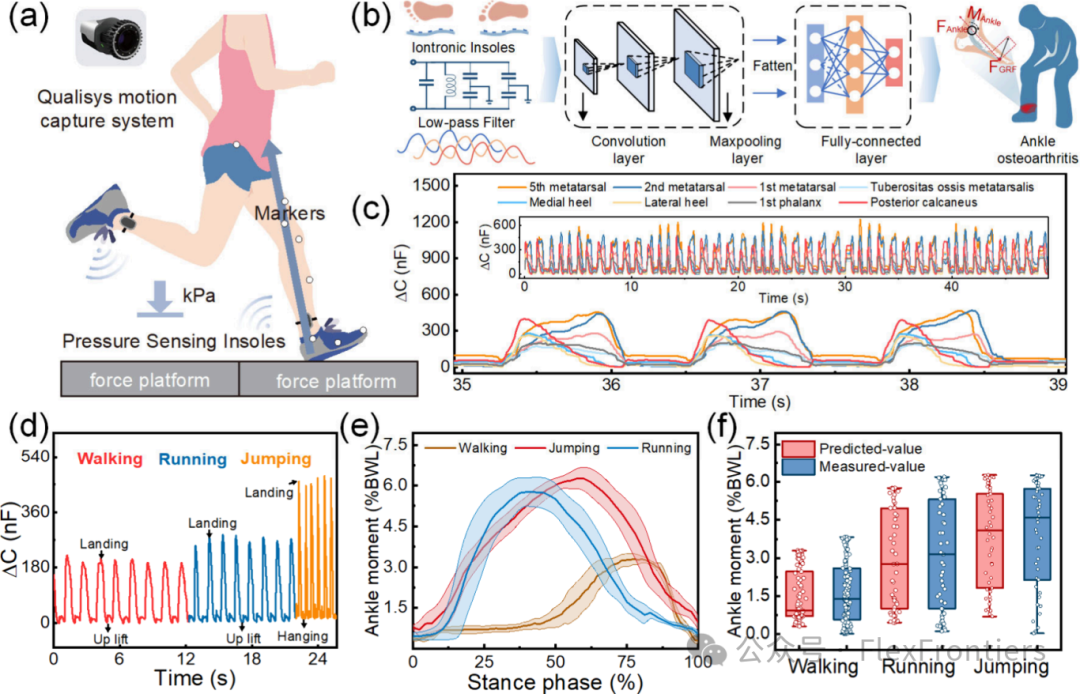
Fig. 5. 基于GMIS的压力鞋垫系统与步态分析
结论与展望
本研究提出了一种基于皮肤启发的梯度模量离子电子传感器,通过材料与结构创新,成功实现了宽压域、高灵敏度与低漂移的协同。GMIS具备制备简单、成本低、可扩展等优势,适用于运动康复、步态分析与长期健康监测,为下一代可穿戴生物力学传感器提供了可行的材料与系统级解决方案。
-
传感器
+关注
关注
2578文章
55895浏览量
795843 -
电子皮肤
+关注
关注
3文章
121浏览量
18987
发布评论请先 登录
上海交通大学,中科院上海硅酸盐所:基于聚烯烃塑料的可持续碳气凝胶,用于高线性度双向应变传感

安徽工程大学、西湖大学:仿生触觉传感器新突破,实现高精度跨域目标识别

电子科技大学:研究用于机器人仿生皮肤的三维可拉伸触觉传感器

重庆大学:运动即供能!研发自供能无线传感器

重磅:重庆大学×奥松半导体×嘉陵江实验室,共建“智能传感器及微系统”中试平台入选市级名单

中科院上海硅酸盐所/新加坡国立大学:研发多自由度高灵敏柔性压离子传感器
山东大学:研究用于高精度压力和温度认知的仿生电子掌

中国科学院:高线性类皮肤柔性传感器研究取得系列进展
四川大学:协同离子-电子传输应变传感器实现宽工作范围内超高且可调灵敏度
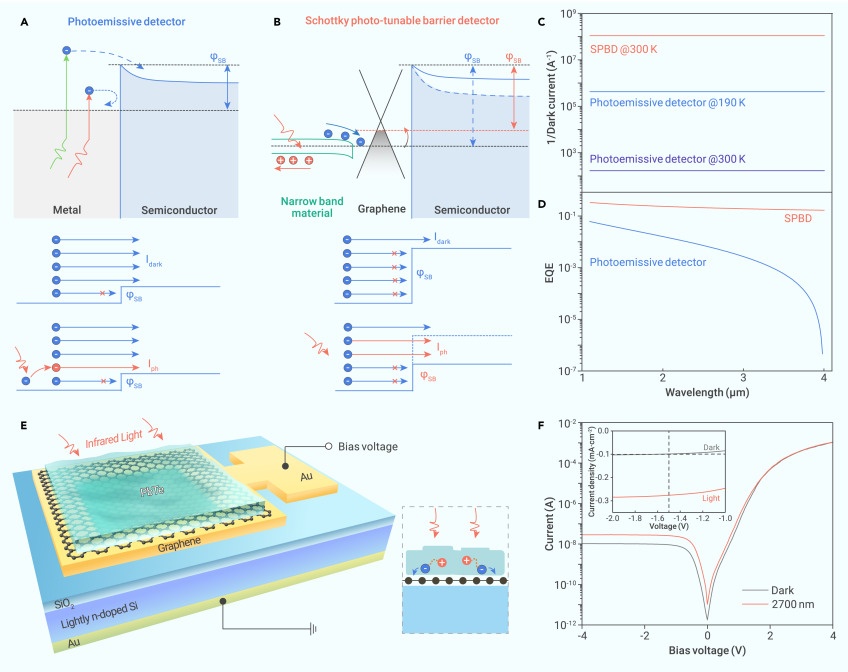
中科院重庆研究院在势垒可光调谐的新型肖特基红外探测器研究中获进展
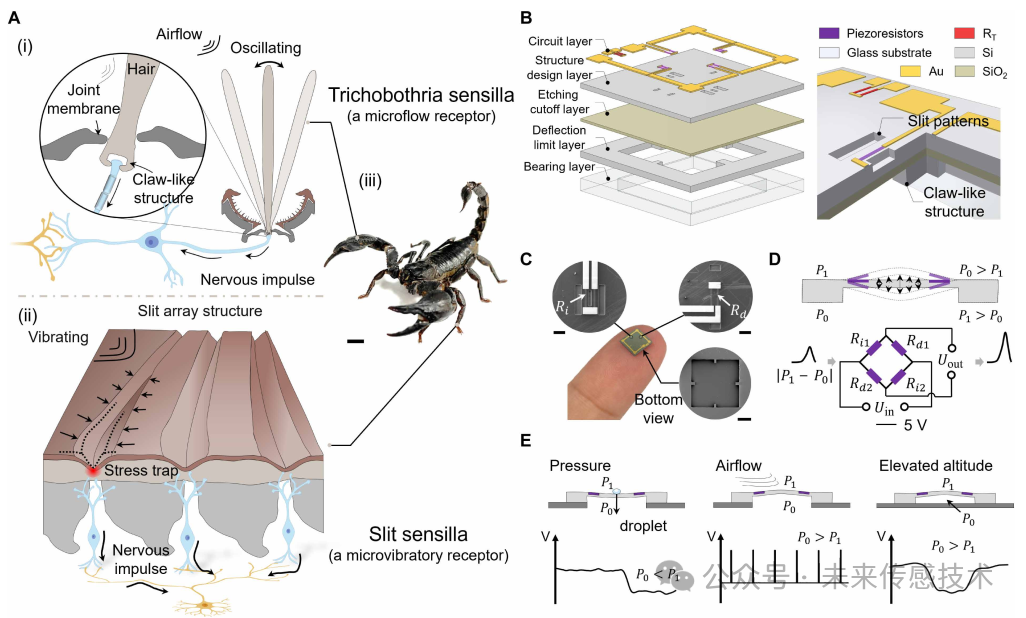
吉林大学和美国加州大学伯克利分校:研究用于智能机器人近体流动检测的超灵敏仿生压力传感器
明治科普 | 让机器人拥有&quot;触感&quot;:电子皮肤如何实现?

中科院宁波材料所:双结构石墨烯/PDMS复合传感器,用于可穿戴设备应用
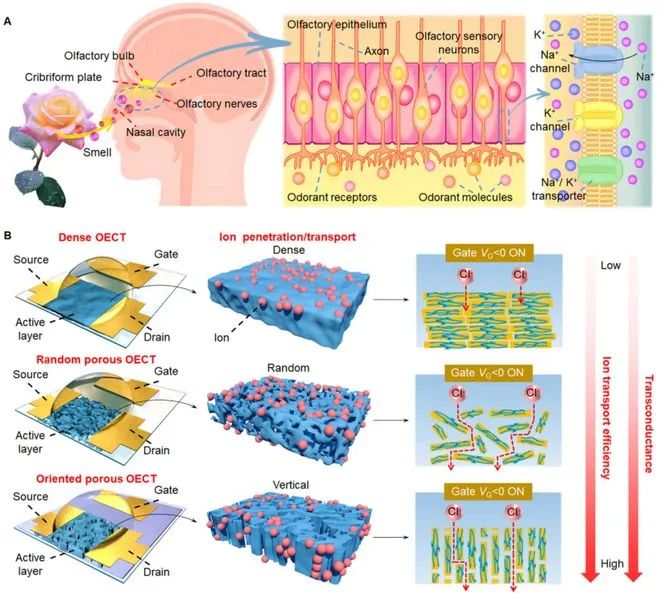
同济大学:仿生纳米通道气凝胶晶体管,突破生物传感灵敏度极限
西南大学,西华大学,河北工业大学,重庆大学:基于双介质层的离子压力传感器耦合超高灵敏度和宽范围检



评论