 端到端在自动驾驶中起到什么作用?
端到端在自动驾驶中起到什么作用?

[首发于智驾最前沿微信公众号]随着自动驾驶技术的发展,端到端凭借其独特优势,被越来越多企业所推崇。所谓端到端,就是把从传感器(比如摄像头、雷达)到车辆动作(转向、油门、刹车)这条链条交给学习模型去“整体”学会,而不是把问题拆成一大堆由人写规则的子模块。端到端分为狭义端到端与广义端到端,狭义端到端指通过单一神经网络将原始信号直接映射为控制指令;广义端到端则更强调信息在流程中尽可能保持原始形态、减少人为压缩,并通过数据驱动实现整体目标,即使中间仍存在部分工程接口。
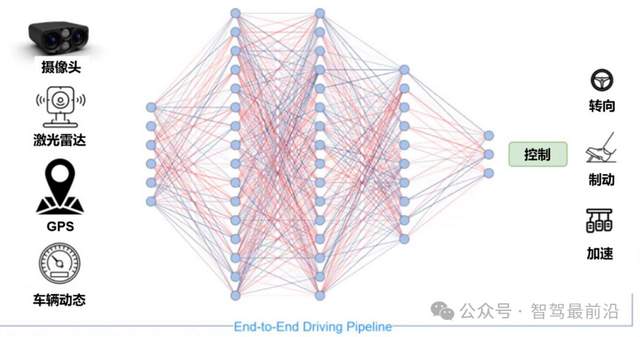
狭义端到端自动驾驶架构(单一神经网络模型实现感知、决策规划、控制)
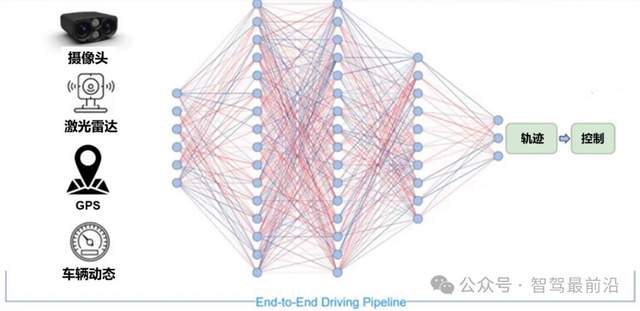
广义端到端自动驾驶架构(神经网络模型实现感知与决策规划,不包括控制模块)
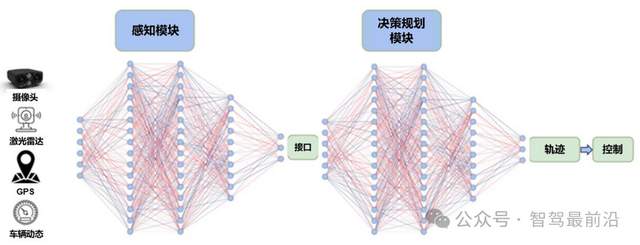
广义端到端自动驾驶架构(感知和决策规划使用神经网络,模块之间仍有人工设计的数据接口)
用更直白的话来理解,传统自动驾驶像把一辆车拆成感知、定位、预测、规划、控制几个模块,每个模块单独优化再接在一起;端到端的想法是,让一张大网学会从输入到输出的整体映射,用数据告诉它“这样做就是好”的标准,而不是每一步都由工程师给出规则,然后根据规则去完成操作。

感知那块到底发生了什么变化?
在早期的自动驾驶系统中,感知任务主要集中于二维或三维检测,其目标是识别图像中的物体(如车辆、行人、车道线),并将这些带有标签的边界框提供给下游模块。然而,这种以“框”为核心的数据形式,与后续的路径规划模块之间存在语义隔阂。
近年来,一种主流趋势是将多摄像头、多传感器的数据统一投影到一个共同的“鸟瞰图”(BEV)空间中。BEV通过将不同视角的信息融合进一个统一的、具备空间一致性的坐标系,极大地便利了路径规划与动态信息的融合。因此,BEV的普及实质上重塑了感知与规划之间的接口,使其更易于被端到端的学习模型所理解与利用。
但BEV仍是二维的,缺乏高度信息。于是有方案提出把表示能力往三维扩展,引入“占用网络”(Occupancy,简称OCC)这样的稠密时空场表示。占用网络不是简单地提供“这里有个车”这样的数据,而是把“某个空间点在未来若干帧里被什么占着、有多大概率被占着”等数据给厘清出,它把时间维、空间维和不确定性都纳进来,对动态交互的建模更友好。
现阶段,“世界模型”的概念越来越火热,其核心思想是构建一个能够重建并推演世界动态的模型,让系统不仅能“看到现在”,还能“想象未来会发生什么”。世界模型既能用于生成训练数据(弥补真实长尾样本短缺),也能在决策时作为内部仿真器来评估不同动作的后果。世界模型不仅是感知/认知能力升级的工具,也是端到端训练和验证的重要补充,但也要注意,如果世界模型生成的数据与真实世界分布差别太大,也会误导训练。
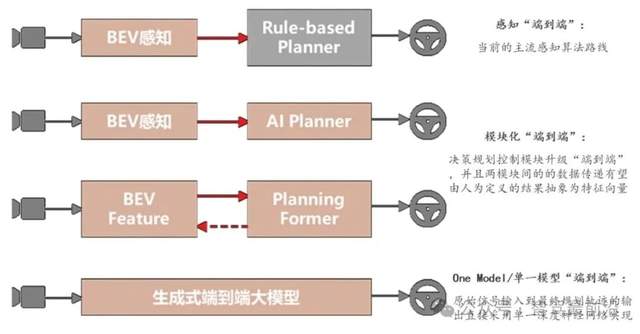
端到端自动驾驶架构演进示意图

决策层怎么学?
完成环境感知后,如何将决策规划交由学习模型,主要有几种路径,其一是模仿学习,通过拟合人类驾驶数据来快速获得基础能力,但泛化性不足,在偏离示范数据时表现不佳;其二是强化学习,通过试错学得鲁棒策略,但依赖仿真环境以规避现实风险;结合二者优势的路径也颇为常见,先用模仿学习初始化模型,再通过强化学习在仿真中优化长期收益。报告将这些方法均视为实现端到端决策的候选方案。
世界模型在决策层扮演着关键角色,它能够基于当前状态,在模型内部生成多种合理的未来场景,从而辅助决策模块进行“前瞻性思考”。这意味着系统无需在现实世界中反复试错,而是可以在其内部模拟环境中评估不同动作的潜在后果,进而选择更安全、更有效的策略。这一机制对于处理长尾和极端场景具有重要价值,但若生成场景与真实世界分布存在显著偏差,也可能引入决策风险,因此必须审慎使用生成数据。
此外,还有一种折中路径,便是“模块化端到端”。该方案在感知端使用神经网络输出丰富的中间表征(如BEV特征或时空占用场),而在决策与控制层则保留或并行运行一个相对轻量且可解释的模型。模块之间通过特征向量进行交互,而非依赖人类可读的标签。这种方式在工程实践中更易于验证与调试,因此被不少国内厂商视为当前阶段向全端到端系统过渡的可行方案。

工程上必须面对的硬问题有哪些?
想将端到端自动驾驶从技术推导走向大规模量产,必须跨越数据、算力、验证、可解释性与持续学习等一系列现实瓶颈。这些挑战共同构成了当前技术落地的主要门槛,也决定了产业竞争的焦点与节奏。
端到端模型对数据的规模、质量及长尾场景覆盖度均有极高要求。与语言模型可依赖海量公开文本不同,自动驾驶需依赖大量真实行车视频、车辆状态及对应的人类驾驶行为数据,且必须覆盖夜间、雨雪、施工区、临时障碍物等稀有场景。特斯拉目前在数据规模上就具备领先优势,其通过影子模式、自动标注与回放训练构建了高效的数据闭环系统。
端到端训练还遵循“规模法则”,更大的模型、更多的数据与更长的训练时间通常带来性能提升,这推动了对大规模云端GPU集群的投入。车端与云端算力作为自动驾驶行业关键竞争要素,车端需满足低延迟与高可靠性,而云端则承担大规模训练任务,目前多数团队需依赖千卡级别的训练资源。
验证是端到端需要面对的另一大难题。端到端系统难以仅通过传统离线指标评估真实表现。开环(离线)评估通过对比模型输出与人类轨迹,虽简便但缺乏交互性检验;闭环(在线)仿真可测试系统的交互与恢复能力,但构建高保真、覆盖长尾场景的仿真环境本身即为挑战。可通过构建融合离线评估、闭环仿真与真实世界影子测试/渐进推送的验证体系,世界模型虽可部分填补长尾数据空白,但其生成偏差带来的验证风险不容忽视。
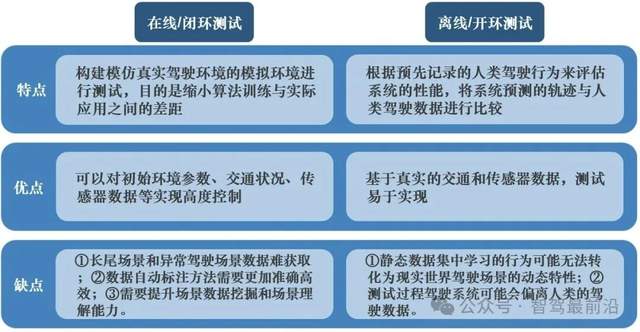
在线/闭环测试与离线/开环测试的主要特点与优缺点
可解释性与灾难性遗忘是端到端不可不避免的两个问题。端到端模型天然具有“黑盒”属性,工程落地与监管合规均要求理解“模型为何做出特定决策”,尤其在事故或异常情况下需具备追溯能力。对于这个问题可以应对的策略包括并联视觉语言模型(将中间表征转化为可读描述)、模块化检查点设计,以及在训练中引入规则约束等。在灾难性遗忘方面,当模型使用新数据微调以改进特定复杂场景时,可能削弱原有能力,实践中已出现版本回退案例。对此的缓解手段包括旧样本回放、权重固化等技术。

技术方向上的差异
在技术路径选择上,行业呈现出不同的演进策略。特斯拉坚持纯视觉方案,基于BEV+Transformer+占用网络构建单一端到端模型,依托海量影子模式数据和回放训练机制实现快速迭代。而国内主流厂商如华为、小鹏、理想等则普遍采用“模块化端到端”或“双系统”架构,在追求性能上限的同时,保留系统的可解释性与应急处理能力。
需要明确的是,技术落地不仅需要前沿的理念,更依赖扎实的工程化基础。其中,数据闭环的效率、算力部署的规模与验证体系的完备性,共同构成了端到端系统能否稳定落地并持续演进的关键支撑。正因如此,“数据+算力”才是端到端竞争的核心要素,这也是为何具备资源优势的头部企业,在端到端落地的进程中能够保持明显的先发优势。

最后的话
端到端自动驾驶的实现依赖于完整的技术链条,感知层面从传统检测向BEV和时空占用网络演进,为决策提供更丰富的环境表征;决策层面结合模仿学习、强化学习和世界模型推演,使系统具备预测与规划能力;工程落地则依靠数据闭环、算力集群和多重验证体系作为支撑,同时必须解决模型可解释性与灾难性遗忘等现实挑战。当前技术发展仍受数据质量与算力规模的关键制约,这也决定了端到端系统从概念验证到量产落地的实际进程。
审核编辑 黄宇
-
端到端
+关注
关注
0文章
50浏览量
10856 -
自动驾驶
+关注
关注
794文章
14979浏览量
181393
发布评论请先 登录
为什么一段式端到端自动驾驶很难落地?


端到端与模块化自动驾驶的数据标注要求有何不同?

如何训练好自动驾驶端到端模型?

自动驾驶中“一段式端到端”和“二段式端到端”有什么区别?

一文读懂特斯拉自动驾驶FSD从辅助到端到端的演进


端到端自动驾驶相较传统自动驾驶到底有何提升?

Nullmax端到端自动驾驶最新研究成果入选ICCV 2025

为什么自动驾驶端到端大模型有黑盒特性?





评论