 自动驾驶中基于规则的决策和端到端大模型有何区别?
自动驾驶中基于规则的决策和端到端大模型有何区别?

[首发于智驾最前沿微信公众号]自动驾驶技术的发展在路径选择上呈现出多样化的趋势,在2020年左右,业内还是非常看好车路协同的方向,但随着技术的逐渐成熟和落地,单车智能成为主要选择。在自动驾驶架构的选择上,也经历了从感知、决策控制、执行的三段式架构到现在火热的端到端大模型,尤其是在2024年特斯拉推出FSD V12后,各车企更是陆续推出自家的端到端大模型,这一概念也成为各车企发布会的重头戏。但很多小伙伴在面对这两项技术时,一直无法厘清他们的区别,尤其是端到端大模型,更是鲜有清晰的认知,只知道端到端是会让自动驾驶更加“人”性化。今天智驾最前沿就用一个生动有趣的例子带大家理解这两个概念。

基于规则的决策
顾名思义,基于规则的感知就是依赖于专家制定的算法和明确的逻辑规则,通常采用模块化设计。感知系统将如图像预处理、目标检测、跟踪、决策等复杂的任务划分为多个子任务,每个模块独立完成特定功能。这种方法的主要优势在于可解释性强和调试方便。当系统出现错误时,工程师可以根据模块划分和预设规则快速定位问题,并通过更新规则或算法参数进行修正。此外,模块化设计便于验证和监管,因为各个独立组件的行为比较明确,符合目前许多安全标准和行业规范。
基于规则的方法也存在局限。其规则往往基于先验知识和经验总结,虽然在标准化道路环境中表现出稳定性,但在面对复杂、多变或者长尾情况时,现有规则难以覆盖所有异常场景。这种模式使得系统在遭遇非典型、稀有事件时可能反应迟钝,安全边界也较为模糊,从而限制了系统整体的鲁棒性和泛化能力。
以一个简单的故事来理解这个概念。在一个小岛上,有两个村庄,这两个村庄的名字分别为感知村和执行村,感知村一直有给执行村送信的需求,有位名叫“决策”的快递员就一直承担着这个任务。

“决策”这位快递员在刚开始工作时,领导告诉他执行村一共有多少户人家,在拿到感知村送的信件后,一定要到执行村的这几户人家一家一家地确认(给决策系统列出的规则),以便可以更好地将信件送到对应的执行村居民。

在工作中,“决策”这位快递员非常守规则,在感知村拿到标有执行村村民名字的信件后(感知到交通环境),都会到执行村从村头到村尾挨家挨户地敲门,并将信件封面交给对应村民看,以确定是否为收件人。
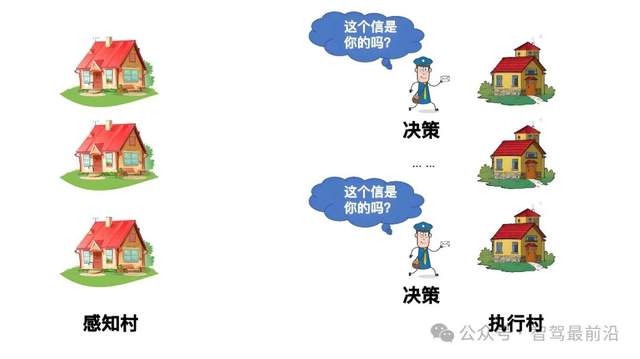
由于需要挨家挨户地敲门并确认(确认对应的规则),这期间需要花费较多的时间,且由于信件被很多执行村村民都看过,因此会出现信件丢失的情况(信息丢失)。若在执行村新搬进来一户居民,并有感知村村民给其送信(边缘场景),由于“决策”这位快递员没有得到领导新增居民的指令(对应规则),因此在送对应信件时,不会去敲新居民的门,信件也无法送到。


端到端大模型
端到端则是利用大规模数据直接训练神经网络,让模型从原始传感器数据(如摄像头图像或激光雷达点云)直接获得控制决策或中间特征。这种方法充分利用深度学习在模式识别和特征提取上的优势,能够自动捕捉复杂场景下的隐含关联,并具有较强的泛化能力。在数据充足且质量较高的前提下,端到端模型在学习异常情况和细微特征时可能比基于规则的方法更为灵活,尤其在应对复杂城市交通环境、应急场景以及多传感器数据融合上表现突出。
其主要缺点在于模型的“黑箱性”——决策过程难以解释,缺乏明确的逻辑链条使得问题排查变得非常复杂。当系统出现失误或意外情况时,难以依据具体模块快速定位错误,同时对训练数据的依赖性过高也可能导致数据偏差引发系统泛化能力下降,从而影响整体安全性。
继续以之前的例子举例,随着“决策”这位快递员送信经验越来越丰富,他发现原来的工作逻辑存在很多问题,耗费时间也太长,因此他开始思考如何更快更好地将信件送到位(端到端大模型思考特性)。

在给执行村送信时,他开始记住对应执行村居民的名字,在拿到信件后,不会再从村头到村尾一家一户地敲门,而是看对应的信件名字,直接将信件送到对应住户(端到端),这一改变使得送信效率得到快速提升。
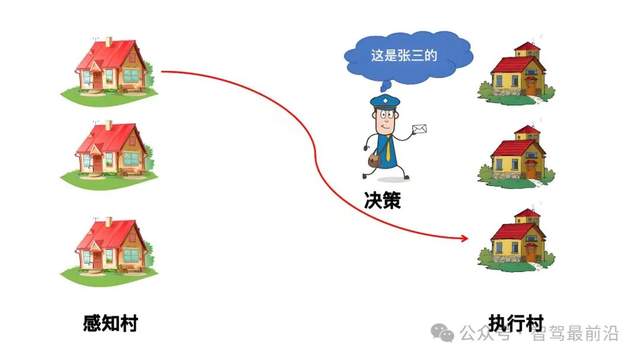
在遇到执行村有新居民搬来后(边缘场景),“决策”一开始也会送信失误,但他会主动去记住新搬来居民的名字(思考过程),并在后面拿到对应的信件后,快速将信件送到位。

这一方法的确是有效提升了送信效率,但由于不再遵守领导要求的挨家挨户敲门的指令(不基于规则),若出现送信失误(出现事故),领导无法确定“决策”走的是哪条路线,因此也无法问责(端到端“黑箱”特性)。


写在最后
以上举的例子仅简单概述了基于规则的决策和端到端,以便大家简单了解这两个概念,实际的技术一定会更为复杂。综上所述,我们可以看到基于规则的感知系统的优势在于整体架构清晰、调试方便、验证容易,适用于已有经验积累较多、要求安全可控的应用场景;而端到端感知系统则具备更强的自适应能力和复杂场景的处理潜力,能够自动发现数据中的潜在模式,但同时在可解释性和安全验证方面存在较大挑战。未来的研发重点应更多集中在如何融合两种方法的优势,而不是选择其中一个,通过融合,既能保证系统的实时、准确与安全,又可以提高整体系统对多变路况的容错及适应能力。随着数据积累与算力提升,混合型设计有望成为自动驾驶系统的新趋势,推动自动驾驶朝着更加智能、可靠和普及的方向发展。
-
智能驾驶
+关注
关注
5文章
3043浏览量
51379 -
端到端
+关注
关注
0文章
51浏览量
10860 -
自动驾驶
+关注
关注
794文章
14989浏览量
181544 -
车路协同
+关注
关注
1文章
65浏览量
4441 -
大模型
+关注
关注
2文章
3771浏览量
5273
发布评论请先 登录
为什么一段式端到端自动驾驶很难落地?

自动驾驶端到端为什么会出现黑盒现象?

端到端与模块化自动驾驶的数据标注要求有何不同?

如何训练好自动驾驶端到端模型?


一文读懂特斯拉自动驾驶FSD从辅助到端到端的演进


端到端自动驾驶相较传统自动驾驶到底有何提升?

一段式端到端在自动驾驶中到底有何优势?

Nullmax端到端自动驾驶最新研究成果入选ICCV 2025

为什么自动驾驶端到端大模型有黑盒特性?





评论