 关于TI设计工业机器人技术实现 CPU 板的不同子系统的解决方案
关于TI设计工业机器人技术实现 CPU 板的不同子系统的解决方案

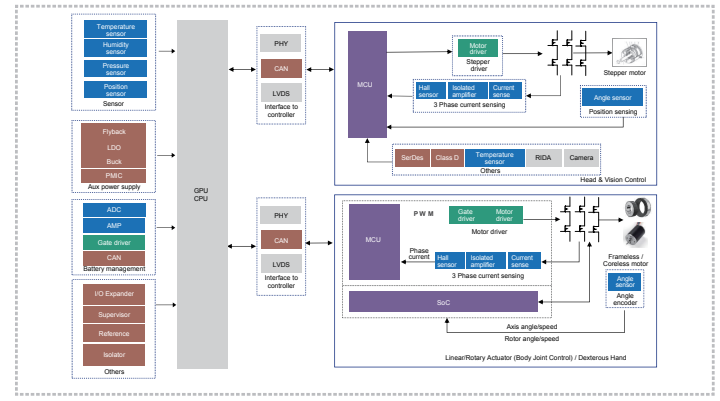
德州仪器 (TI) 的工业机器人 CPU 板参考设计展示了在设计工业机器人时实现 CPU 板的不同子系统的解决方案。
基于具有卓越处理性能的 SitaraTM 处理器的设计是可用的
Sitara 处理器可以运行多种工业以太网协议(例如 PROFINET、POWERLINK、EtherCAT、SERCOS、EtherNet/IP)或专用通信协议。此外,还展示了多种其他处理器和 FPGA 的电源设计
如果需要无线连接,TI 提供使用其广泛无线产品组合的设计
而且还展示了电源、备用电源和保护的参考设计,以解决有关 CPU 板模拟部件的问题
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
cpu
+关注
关注
68文章
11331浏览量
225906 -
ti
+关注
关注
114文章
8085浏览量
220037 -
工业机器人
+关注
关注
91文章
3551浏览量
98511
发布评论请先 登录
相关推荐
热点推荐
基于米尔RK3576核心板的国产割草机器人解决方案
日益严格的数据安全法规。
3. 工业级宽温与户外适应性
米尔核心板支持 -40 ℃ ** ~ +85**℃ 的工业级工作温度。RK3576核心板均可保证割草
发表于 04-24 17:31
Neway电机方案在机器人技术方面的优势
系统稳定性背景:工业机器人需长时间连续运行,电源故障可能导致机械臂失控、生产线停机等严重后果。Neway方案:具备过压、过流、短路三重保护功能,提供OCP(过流保护)、OTP(过温保护
发表于 03-30 09:39
Infineon移动机器人电机控制方案深度解析
: Infineon Technologies 移动机器人电机控制演示板.pdf 1. 方案概述 本方案主要面向设计工程师、
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
”应用提供了强大的硬件支撑。
五、结语
“高精度机器人控制”是智能制造时代的核心竞争力。
米尔 MYD-LT536 开发板凭借强大的计算能力、丰富的工业接口与成熟的系统生态,能够帮助
发表于 11-14 15:48
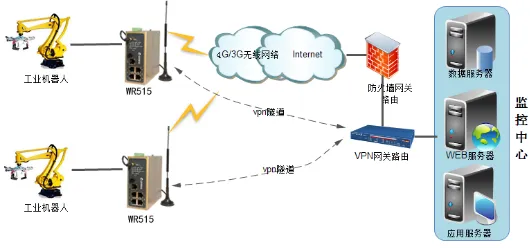
工业机器人联网通信解决方案
成本高,对设备管理提出了越来越高的要求。 客户现场设有生产监控系统,部署有WEB服务器、数据服务、应用服务器等,要求将机器人控制器、以太网plc及传感器等设备联网,实现应用服务器来试试采集现场plc数据,并可以远程对
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
。· 利用开发板上的MIPI CSI1和CSI2接口,完整接入8路摄像头,实现了所有通道的视频预览与采集,为机器人构建了全方位的视觉感知系统。卓越性能表现:·
发表于 10-29 16:41
揭秘工业 4.0 机器人:感知、安全和控制技术
范围内的可扩展部署。这些系统需要传感器、安全硬件、电路保护和控制组件,以满足高带宽、实时响应和严格功能安全标准的要求。 本文探讨了支撑工业 4.0 机器人技术的基础

工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中
发表于 07-26 11:22
工业通信界的“月老”:CC\\-Link IE和DeviceNet如何牵起机器人的“红线”
机器人的“姻缘簿”上,它们竟成了最佳“CP”,联手解决设备通信难题。
耐达讯通信技术CC-Link IE基于以太网,擅长快速处理海量数据,就像工业界的“闪电快递员”;DeviceNet网关作为现场总线
发表于 06-12 14:35
工业机器人与协作机器人概念不同
在自动化生产的浪潮中,工业机器人与协作机器人逐渐成为企业提升效率、优化产能的得力助手。但它们并非同一概念,在功能、设计与应用场景上有着显著差异。北京沃华慧通测控有限公司凭借深厚的技术沉

明远智睿SSD2351开发板:语音机器人领域的变革力量
通过网络连接云端服务器进行快速检索和分析,然后利用语音合成技术将答案以自然流畅的语音反馈给用户。同时,借助开发板的网络连接功能,语音机器人还可以与后台管理系统进行数据交互,实时更新知识
发表于 05-28 11:36
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
阅读心得体会:ROS2机器人视觉与地图构建技术
通过对本书第7章(ROS2视觉应用)和第8章(ROS2地图构建)的学习,我对机器人视觉感知和自主导航的核心技术有了更深入的理解。以下是我
发表于 05-03 19:41



评论