 风洞悬浮球:基于RT-Thread与MCXA156的简单控制实践 | 技术集结
风洞悬浮球:基于RT-Thread与MCXA156的简单控制实践 | 技术集结

目录
项目概述
硬件选型与连接
软件架构设计
VL53L0X配置
风扇控制 (PWM)
控制算法
远程监控
OLED数据显示
有待改进的地方
项目源码
直播回放
1 项目概述
本项目基于RT-Thread实时操作系统和NXP FRDM-MCXA156 开发板,构建了一个能够将乒乓球稳定悬浮在预定高度的控制系统。配备了本地数据显示屏和远程Web监控界面,构成了一个功能相对完整的嵌入式系统。
项目核心功能:
高度测量: 通过VL53L0XToF激光测距传感器,系统能够以毫米级精度实时获取乒乓球的高度。
复合控制算法: 考虑到管道内风的非线性特性,我没有采用单一的PID控制器,而是使用简单的PID + 前馈 + 增益调度的复合控制策略,以适应不同目标高度下的系统动态变化。
多任务并发处理: 基于RT-Thread的多线程架构,将核心控制、OLED显示、网络通信等任务分离到不同的线程中,确保了控制任务的实时性不受其他功能影响。
远程监控与人机交互: 系统通过RW007Wi-Fi模块接入局域网,并借助一个Python WebSocket代理,将数据实时推送到Web前端。用户可以在浏览器上观察高度、目标等参数的实时曲线,并可远程下发指令,调整悬浮的目标高度。
本文将详细剖析该系统的硬件选型、软件架构、核心算法实现以及开发过程中遇到的挑战与解决方案,希望能为对嵌入式控制系统感兴趣的开发者提供一些参考和启发。
2 硬件选型与连接
2.0 材料准备
管道:亚克力管子(外径50mm 厚度2mm 内孔46mm 长50cm )
出风口罩:随便找一个饮料瓶,剪掉上半,底部戳几个洞,罩在管道一侧,用于稳定管道末端风速并防止小球飞出
风扇:pwm 4线风扇(12v18000转 4线)
降压稳压模块:12v转5v,要有12v输出和5v输出,注意共地
2.1 核心控制器:NXP FRDM-MCXA156
性能: 搭载 ARM Cortex-M33 内核,主频高达 96MHz,为复杂的控制算法和多线程应用提供了充足的算力。
外设: 内置多个 I2C, SPI, PWM, UART 等接口,可以轻松连接本项目所需的各种外设,无需额外的扩展板。
生态: NXP官方提供了完善的SDK和文档支持,同时RT-Thread也对其有良好的适配,大大降低了开发门槛。
2.2 各功能模块
组件 | 型号 | 作用 | 选型理由 |
高度传感器 | VL53L0X | ToF激光测距 | 提供毫米级、高频率的距离测量,不受环境光干扰,是本项目精确控制的基础。 |
执行器 (风扇) | YS4028B12H | 产生上升气流 | 4028尺寸的暴力风扇,支持PWM调速,能够提供足够大的风量来托起乒乓球。 |
显示屏 | SSD1306 | 128x64 OLED | I2C接口,功耗低,体积小,方便在本地实时显示关键数据,便于调试。 |
Wi-Fi模块 | RW007 | 网络通信 | RT-Thread生态中常见的Wi-Fi模块,驱动成熟,可以方便地让设备接入网络。 |
2.3 硬件连接详情
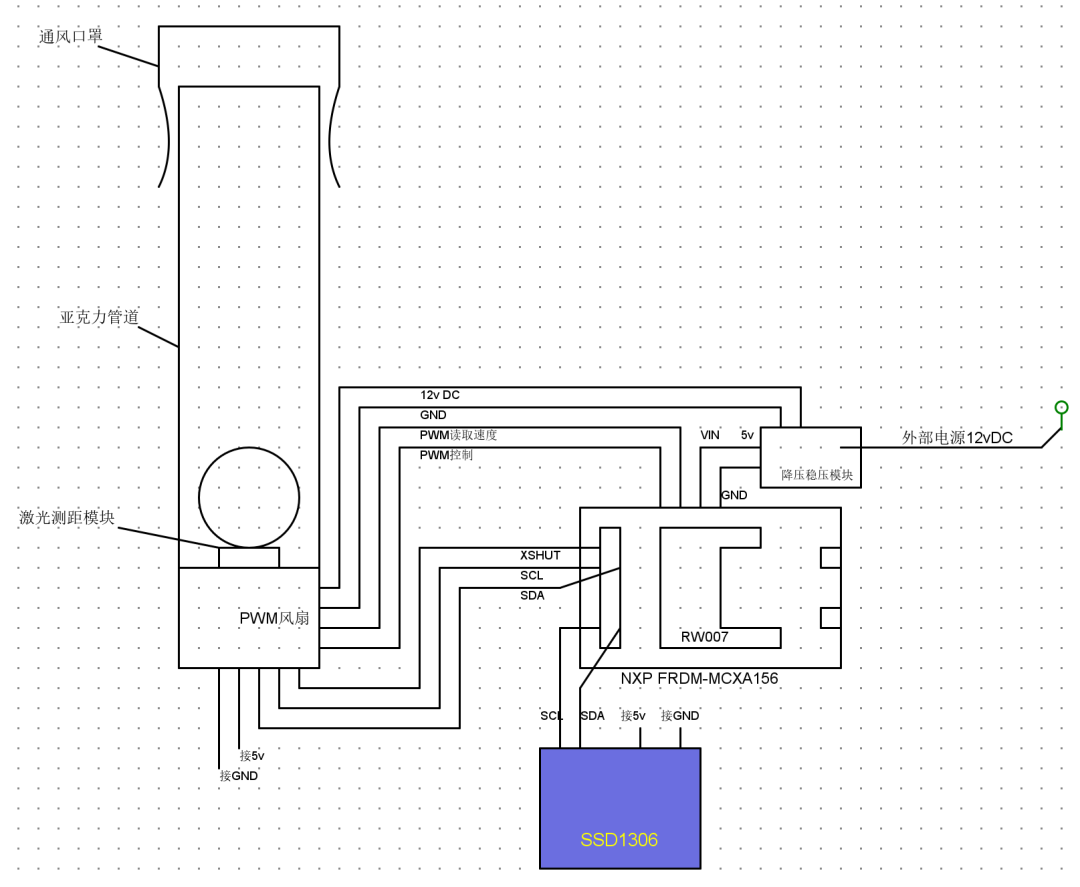
所有模块与 FRDM-MCXA156 开发板的连接如下表所示。
组件 | 开发板引脚 | 备注 |
PWM风扇 (YS4028B12H) | P3_6 | 连接到FLEXPWM0_A0,用于PWM调速 |
ToF传感器 (VL53L0X) | P0_22(SCL),P0_23(SDA),P2_0(XSHUT) | 软件I2C总线和开关控制 |
OLED屏幕 (SSD1306) | P1_9(SCL),P1_8(SDA) | 硬件I2C总线 (LPI2C2),配置参考SSD1306配置 |
Wi-Fi模块 (RW007) | (SPI) | 连接到LPSPI1,配置参考rw007配置 |
调试串口 | P0_2(RX),P0_3(TX) | 连接到LPUART0 |
工作指示灯 | P3_12 | GPIO输出 |
3 软件架构设计
本项目的软件核心是运行在MCXA156上的RT-Thread嵌入式固件,它与PC端的Python代理脚本和Web前端共同构成一个完整的监控系统。
3.1 整体架构图
下图展示了系统的三个主要部分(嵌入式设备、中间代理、用户端)以及它们之间的数据流和交互关系。
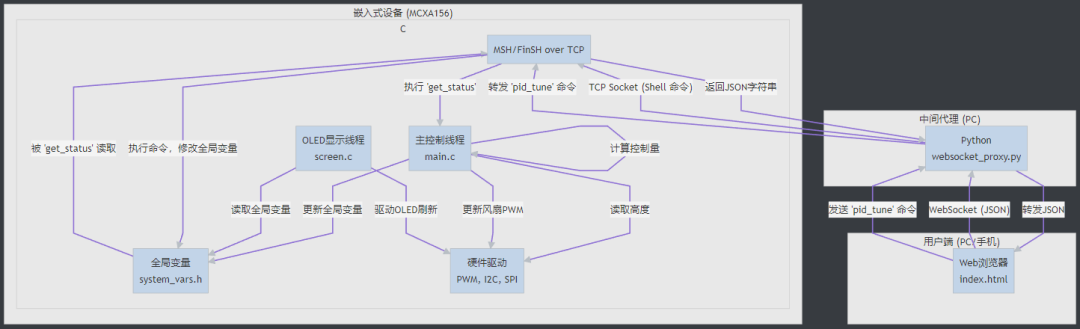
3.2 工作流程详解
数据采集与控制 (主控制线程): 系统核心,该线程以20ms的周期运行,在每个周期内:
通过I2C总线读取VL53L0X传感器的高度数据。
根据当前高度和斜坡化的目标高度,执行PID + 前馈 + 增益调度算法,计算出最终的风扇PWM占空比(转速)。
调用PWM驱动,更新风扇转速。
将当前高度、目标高度等状态信息写入全局变量,供其他线程使用。
本地显示 (OLED显示线程): 该线程独立于主控制循环,它定期从全局变量中读取最新的系统状态,并将其格式化后显示在SSD1306屏幕上。
远程通信 (Websocket代理):
PC上运行的websocket_proxy.py脚本一方面通过TCP连接到设备的TCP服务器,另一方面启动一个WebSocket服务等待Web浏览器的连接。代理脚本定期向设备发送get_status命令,设备执行该命令后,会返回一个包含所有状态信息的JSON字符串。脚本解析此字符串,并通过WebSocket将其推送给前
4 VL53L0X配置
可以直接使用vl53l0x这个软件包
4.1 软件包的启用与配置
启用软件包:在 RT-Thread online packages ---> peripheral libraries and drivers ---> sensors drivers ---> 中,勾选[*] VL53L0X Time of flight(TOF) sensor.。
sensor_v1驱动:勾选[*] Enable sensor_v1 divce framework 并启用sample。
配置I2C总线:使用软件I2C,配置如下

修改一下sample:
MSH_CMD_EXPORT(read_distance_sample, read distance sample);staticintrt_hw_vl53l0x_port(void){ structrt_sensor_configcfg; cfg.intf.dev_name="i2c1"; /* i2c bus */ cfg.intf.user_data= (void*)0x29; /* i2c slave addr */ rt_hw_vl53l0x_init("vl53l0x", &cfg,64);/* xshutdown ctrl pin */ returnRT_EOK;}INIT_COMPONENT_EXPORT(rt_hw_vl53l0x_port);// 在vl53l0x_sensor_v1.c中#define VL53L0X_I2C_BUS "i2c1" /* i2c linked */
4.2 应用层调用
配置完成后,VL53L0X传感器就被注册为RT-Thread系统中一个名为tof_vl53l0x的标准设备(要把RT_NAME_MAX改大一点才能显示完全)。在main.c中,我们只需通过标准设备接口即可与之交互,代码非常简洁:
/* --- main.c --- */// 1. 查找并打开设备rt_device_ttof_dev =rt_device_find("tof_vl53l0x");rt_device_open(tof_dev, RT_DEVICE_FLAG_RDONLY);// 2. 在主循环中读取数据structrt_sensor_datasensor_data;rt_size_tres =rt_device_read(tof_dev,0, &sensor_data,1);// 3. 获取毫米为单位的距离值current_height = sensor_data.data.proximity;
5 风扇控制 (PWM)
参考Servo_sg90库,改一改就能用,当然也可以直接操作pwm
5.1 引脚配置
MSH_CMD_EXPORT(read_distance_sample, read distance sample);staticintrt_hw_vl53l0x_port(void){ structrt_sensor_configcfg; cfg.intf.dev_name="i2c1"; /* i2c bus */ cfg.intf.user_data= (void*)0x29; /* i2c slave addr */ rt_hw_vl53l0x_init("vl53l0x", &cfg,64);/* xshutdown ctrl pin */ returnRT_EOK;}INIT_COMPONENT_EXPORT(rt_hw_vl53l0x_port);// 在vl53l0x_sensor_v1.c中#define VL53L0X_I2C_BUS "i2c1" /* i2c linked */
5.2 核心实现
驱动的核心在于ys4028b12h_set_speed函数:
/* --- applications/fan/YS4028B12H.c --- */rt_err_tys4028b12h_set_speed(ys4028b12h_cfg_tcfg,floatspeed){ // ... 省略参数检查 ... // 核心逻辑:根据速度百分比计算脉冲宽度值 cfg->pulse = (int)(cfg->period * speed); // 调用RT-Thread底层PWM API进行设置 rt_pwm_set(cfg->name, cfg->channel, cfg->period, cfg->pulse); returnRT_EOK;}
在main.c的主控制循环中,只需调用这个高层API即可:
/* --- main.c --- */// ... PID计算之后 ...floatfinal_fan_speed = ff_speed + pid_output;// ... 限幅之后 ...ys4028b12h_set_speed(cfg, final_fan_speed);
便于维护和拓展
6 控制算法
考虑到风洞系统是一个典型的非线性系统(在不同高度,维持悬浮所需的风力变化并非线性),单一的PID控制器难以在整个高度范围(50mm ~ 450mm)内都取得良好效果。因此,本项目采用了一套简单的复合控制策略。
6.1 复合控制策略概览
我们的控制算法主要由以下四个部分组成,它们在 main.c 的主控制循环中协同工作:
设定值斜坡 (Ramped Setpoint):变更高度时让目标高度缓慢变化,避免目标高度突变带来的系统剧烈震荡。
增益调度 (Gain Scheduling):根据当前目标高度,动态调整PID参数(Kp, Ki, Kd),以适应系统的非线性。
前馈控制 (Feed-forward):引入一个基础风速,作为PID控制的“预补偿”,加快系统响应。
PID闭环控制:经典的比例-积分-微分控制器,用于消除系统的稳态误差。
6.2 代码实现
设定值斜坡
当用户设置一个新的target_height时,不直接将其作为PID控制器的目标,而是引入一个中间变量ramped_height,让它以固定的步长RAMP_STEP逐渐逼近最终目标。
/* --- main.c --- */// 每一次变化的步长#defineRAMP_STEP 0.5f// 最终目标值floattarget_height =250.0f;// PID控制器当前追踪的、平滑变化的目标floatramped_height =250.0f;// 在主循环中if(FABS(ramped_height - target_height) > RAMP_STEP) { if(ramped_height < target_height) ramped_height += RAMP_STEP; else ramped_height -= RAMP_STEP; // 当追踪目标变化时,需要同步更新PID增益 update_pid_gains_by_target(ramped_height);} else { ramped_height = target_height;}
这样做可以有效防止因目标值瞬间变化过大而导致的超调和震荡。
增益调度与前馈
增益调度和前馈都基于预先测定好的查找表。在main.c中,我们定义了gain_schedule_table 和 ff_table。
gain_schedule_table: 存储了不同高度下,经过优化的PID参数组。
ff_table: 存储了不同高度下,一个大致能让球悬浮的基础风速(事实上,很难找,找到一个缓慢上升的速度就可以了)。
update_pid_gains_by_target()和get_feedforward_speed()函数会根据当前的ramped_height,通过线性插值的方式,从查找表中计算出最合适的Kp, Ki, Kd和基础风速ff_speed。
/* --- main.c: update_pid_gains_by_target() 伪代码 --- */// 1. 找到目标高度所在的区间lower_bound = find_closest_lower_entry(target);upper_bound = find_closest_upper_entry(target);// 2. 计算插值比例ratio = (target - lower_bound.height) / (upper_bound.height - lower_bound.height);// 3. 线性插值计算出当前高度对应的Kp, Ki, KdKP = lower_bound.kp + ratio * (upper_bound.kp - lower_bound.kp);KI = lower_bound.ki + ratio * (upper_bound.ki - lower_bound.ki);KD = lower_bound.kd + ratio * (upper_bound.kd - lower_bound.kd);
PID核心计算与输出
最后,将前馈控制量与PID控制器的输出量相加,得到最终的风扇速度。
/* --- main.c: 主控制循环核心 --- */// PID 控制器核心计算floaterror= ramped_height - (float)current_height;integral_error +=error;float derivative_error =error- previous_error;float pid_output = (KP *error) + (KI * integral_error) + (KD * derivative_error);previous_error =error;// 前馈与PID输出合并float ff_speed = get_feedforward_speed(ramped_height);float final_fan_speed = ff_speed + pid_output;// 输出限幅与积分抗饱和if(final_fan_speed >1.0f) { final_fan_speed =1.0f; integral_error -=error;// 抗饱和:当输出饱和时,减去本次积分量}if(final_fan_speed < 0.0f) { final_fan_speed = 0.0f; integral_error -= error; // 抗饱和}// 设置风扇速度ys4028b12h_set_speed(cfg, final_fan_speed);
当计算出的final_fan_speed超出物理限制(>1.0或<0.0)时,我们会从积分项integral_error中减去(或加上)本次的误差。这可以防止积分项在输出饱和期间无限制地累积,从而避免了在系统恢复时可能出现的巨大超调。
7 远程监控
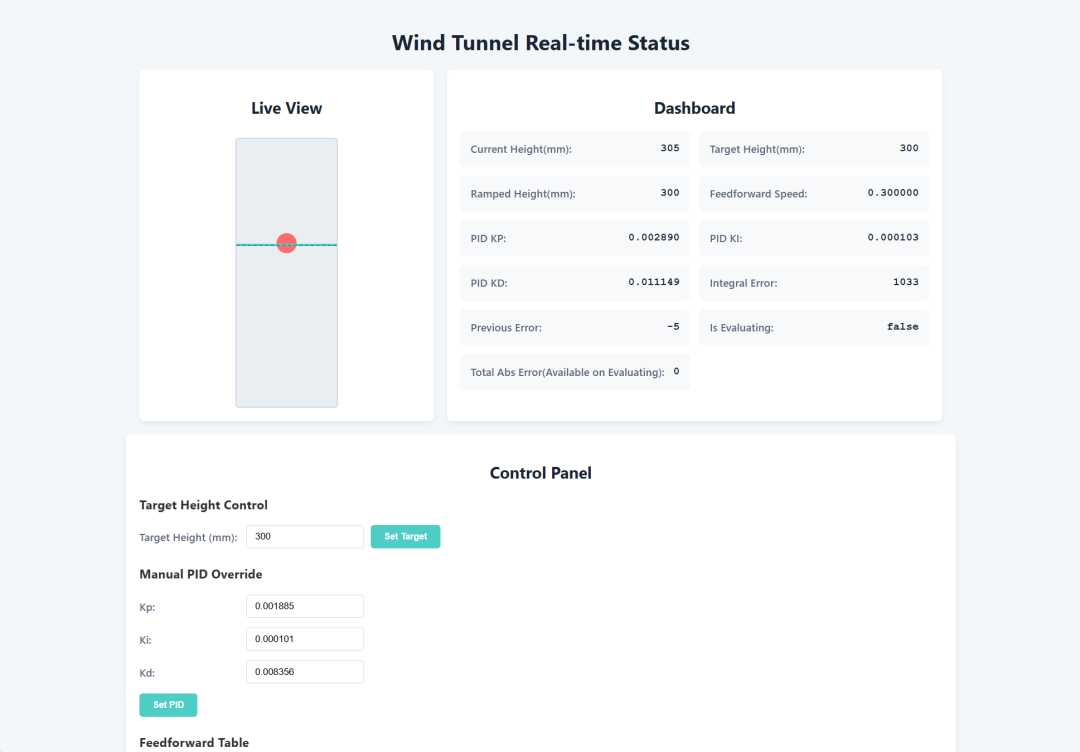
为了让控制过程可视化,并能远程干预,本项目设计了一套基于Web的远程监控系统。其核心思想是:在设备端运行一个自定义的TCP应用层协议服务器,并通过一个PC端的Python脚本作为代理,将TCP协议转换成Web前端通用的WebSocket协议。
7.1 设备端:自定义TCP服务器 (remote.c)
参考network_samples,我在设备端实现了一个简单的TCP服务器(applications/remote/remote.c),它监听在5000端口。这个服务器的功能非常专一,只响应两个核心命令:
get_status: 当收到此命令时,服务器会立即读取系统中所有相关的全局变量(如当前高度、目标高度、PID参数等),将它们打包成一个JSON字符串,然后发送给客户端。
pid_tune: 当收到此命令(例如pid_tune -t 300)时,服务器会直接调用已有的pid_tune()MSH函数,从而实现对系统参数的修改。
/* --- applications/remote/remote.c: 命令分发伪代码 --- */// ... 接收并解析命令 ...if(strcmp(argv[0],"get_status")==0){// 打包JSON并发送sprintf(send_buf,"{"current_height":%ld, ... }", current_height,...); send(connected, send_buf,...);}elseif (strcmp(argv[0],"pid_tune")==0){// 直接调用MSH函数 pid_tune(argc, argv); send(connected,"OK\r\n",...);}
这里复用了为串口命令行调试而编写的pid_tune函数,因为只需要执行修改不需要回显,系统的实时信息由get_status完成。
7.2 中间代理:WebSocket协议转换器 (websocket_proxy.py)
它使用Python的asyncio和websockets库,同时维护两类连接:
1.一个到设备TCP服务器的持久连接:
它会定期(每100ms)自动发送get_status命令来拉取最新数据。
当从TCP连接收到设备返回的JSON数据后,它会立即将这些数据广播给所有连接到它的WebSocket客户端。
多个来自Web浏览器的WebSocket连接:
当从任何一个WebSocket客户端收到命令时(如用户在网页上调整了目标高度),它会将这条命令原封不动地通过TCP连接转发给设备。
# --- applications/remote/websocket_proxy.py: 核心逻辑伪代码 ---# 任务一:定期请求状态asyncdefrequest_status_periodically(): whileTrue: tcp_writer.write(b"get_status\r\n") awaitasyncio.sleep(0.1)# 任务二:处理TCP收到的数据asyncdeftcp_communication_manager(): whileTrue: message =awaittcp_reader.read() # 如果是JSON数据 ifis_json(message): # 广播给所有WebSocket客户端 forclientinclients: awaitclient.send(message)# 任务三:处理WebSocket客户端发来的命令asyncdefhandle_websocket_client(websocket): asyncforcommandinwebsocket: # 直接转发给TCP服务器 tcp_writer.write(command.encode())
8 OLED数据显示
除了远程监控,本项目还集成了一块 SSD1306 OLED屏幕,用于在设备端实时显示关键信息。
8.1 显示线程
为了不影响核心控制逻辑的实时性,要将OLED的刷新任务放在一个独立的线程中。
/* --- main.c --- */screen_thread =rt_thread_create("ScreenUpdate", screen_on,RT_NULL,1280,11,20);rt_thread_startup(screen_thread);
screen_on函数(位于applications/OLED/screen.c)是这个线程的实体。它与主控制线程是并发执行的。
8.2 通过全局变量进行线程间通信
我创建了一个头文件applications/system_vars.h,在其中使用 extern 关键字声明了所有需要在线程间共享的变量。
/* --- applications/system_vars.h --- */#ifndefSYSTEM_VARS_H#defineSYSTEM_VARS_H// ...externint32_tcurrent_height;externfloat target_height;// ...#endif
主控制线程作为生产者,在每次循环的最后,会更新这些全局变量的值。
OLED显示线程作为消费者,它只需包含system_vars.h这个头文件,就可以直接访问这些变量的最新值。
/* --- applications/OLED/screen.c --- */#include// 包含全局变量声明voidscreen_on(){ // ... u8g2初始化 ... while(1) { // 直接读取全局变量 sprintf(buf,"Current: %d", current_height); u8g2_DrawStr(&u8g2,10,18, buf); sprintf(buf,"Target: %d", (int)target_height); u8g2_DrawStr(&u8g2,10,36, buf); u8g2_SendBuffer(&u8g2); rt_thread_mdelay(500);// 降低刷新率,避免闪烁 }}
这种“生产者-消费者”模式,通过共享内存(全局变量)进行通信,是一种简单高效的线程间数据交换方式。对于本项目这种数据关系简单、实时性要求不极端的场景来说,是一个非常合适的选择。
9 有待改进的地方
传感器的I2C问题:VL53L0X传感器在连接到MCXA156的硬件I2C总线时,始终无法被正确初始化,会卡在一个叫VL53L0X_device_read_strobe的函数上,尝试次数超过2000,然后返回错误。排查了连线问题,也确认了I2C引脚配置了(SSD1306可以正常使用),找不出来,发现使用软件i2c没问题就摆了。
控制精度:因为控制算法比较简单,而且PWM风扇对PWM占空比的响应也不是完全线性的(阶梯式的),加之管道内的风流比较复杂,所以小球在悬浮时最大会有10mm左右的上下波动,无法做到让小球精确的悬浮在指定的高度。
控制算法优化:目前的PID参数和前馈表是通过手动试凑和简单的评估脚本(贝叶斯优化)得到的。未来可以引入更高级的系统辨识方法(如基于MATLAB的System Identification Toolbox)来建立更精确的数学模型,或采用在线自动整定算法(如Ziegler-Nichols或继电反馈法)来自动优化参数。
增加鲁棒性:可以增加对传感器数据异常值的滤波处理(如卡尔曼滤波),以应对乒乓球快速晃动或偶尔的测量噪声。
风扇驱动:暂时只写了set_speed,还有通过pwm读取当前转速的功能没有做。
希望本文的分享,能为同样走在嵌入式开发道路上的朋友们提供一些有价值的参考。
10 项目源码
GitHub仓库地址:https://github.com/Cylopsis/Little-Wind-Tunnel
欢迎大家提出宝贵的意见和建议。
11 直播回放
微信视频号直播讲解回放:
RT-Thread Github 开源仓库,欢迎撒个星(Star)支持,更期待你的代码贡献:https://github.com/RT-Thread/rt-thread
-
开发板
+关注
关注
25文章
6144浏览量
113833 -
实时操作系统
+关注
关注
1文章
206浏览量
31819 -
RT-Thread
+关注
关注
32文章
1545浏览量
44319
发布评论请先 登录
RT-Thread编程指南
RT-Thread全球技术大会:RT-Thread开源重塑软件发展新生态
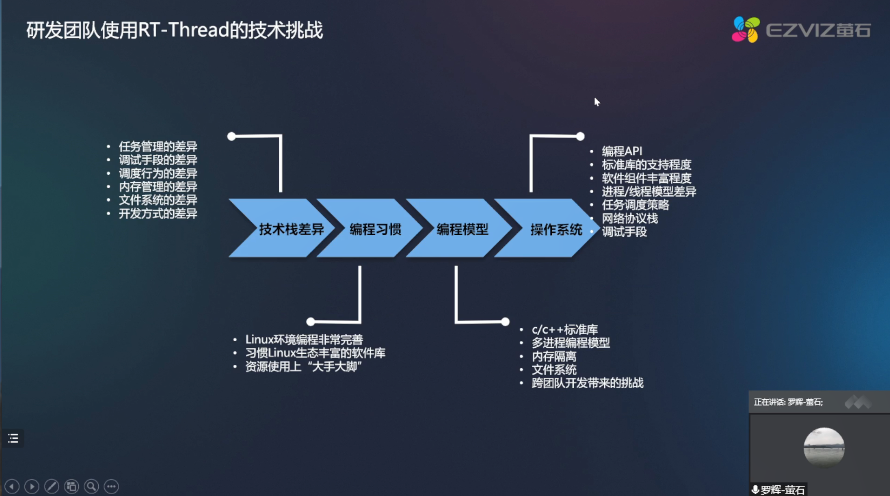
RT-Thread全球技术大会:萤石研发团队使用RT-Thread的技术挑战
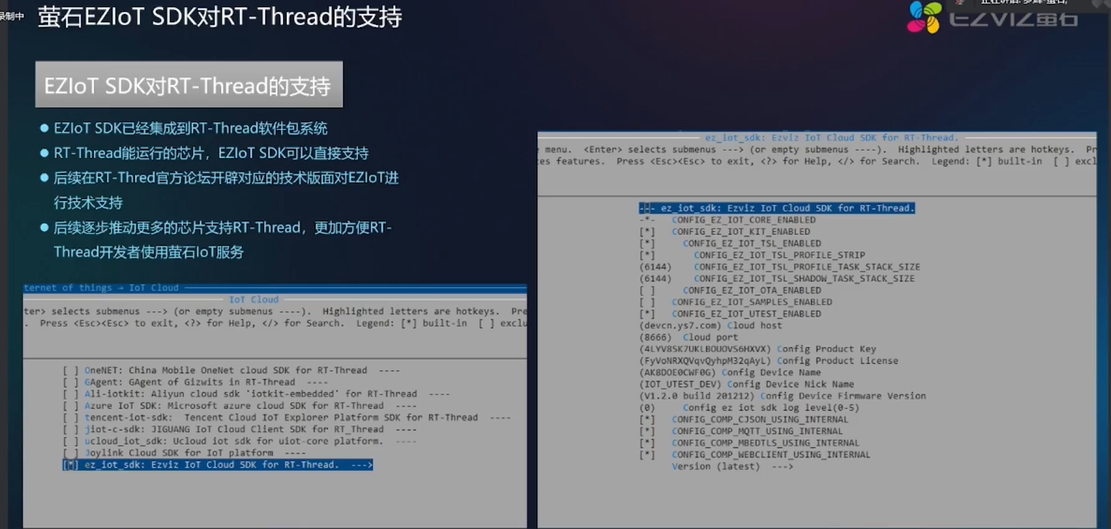
2022 RT-Thread全球技术大会:萤石EZIOT SDK对RT-Thread的支持
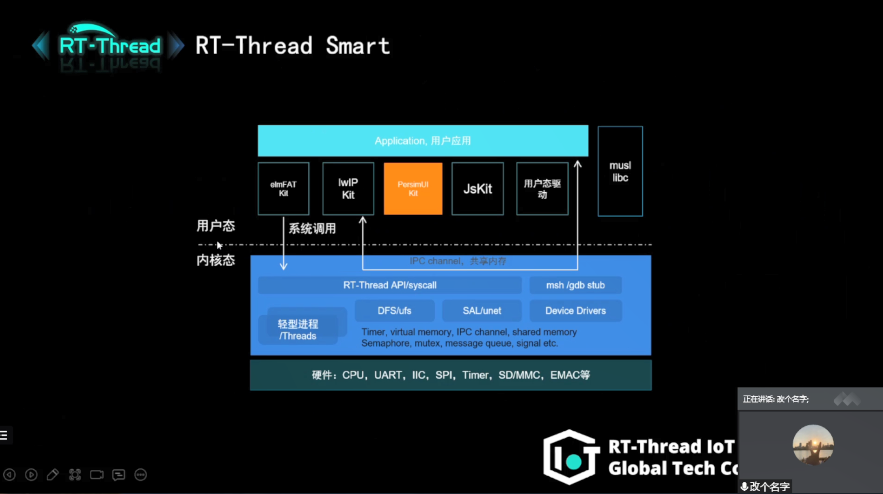
RT-Thread全球技术大会:RT-Thread Smart更好的兼容Linux生态
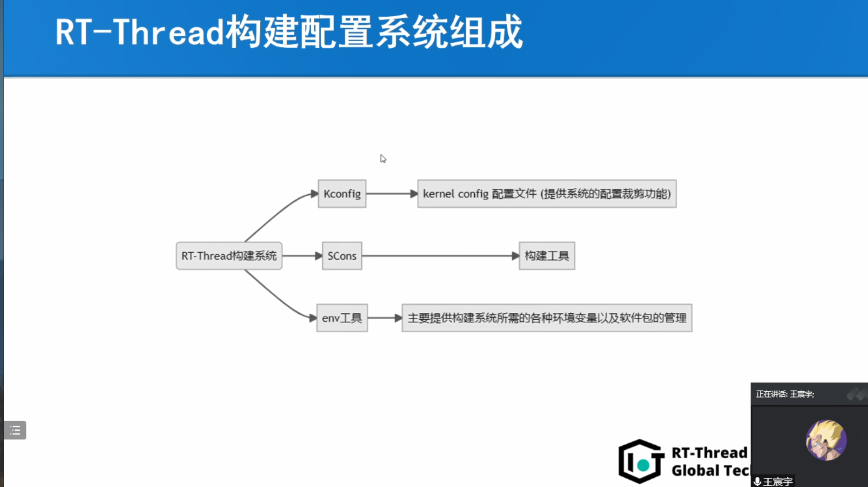
RT-Thread全球技术大会:Kconfig在RT-Thread中的工作机制
RT-Thread全球技术大会:在RT-Thread上编写测试用例
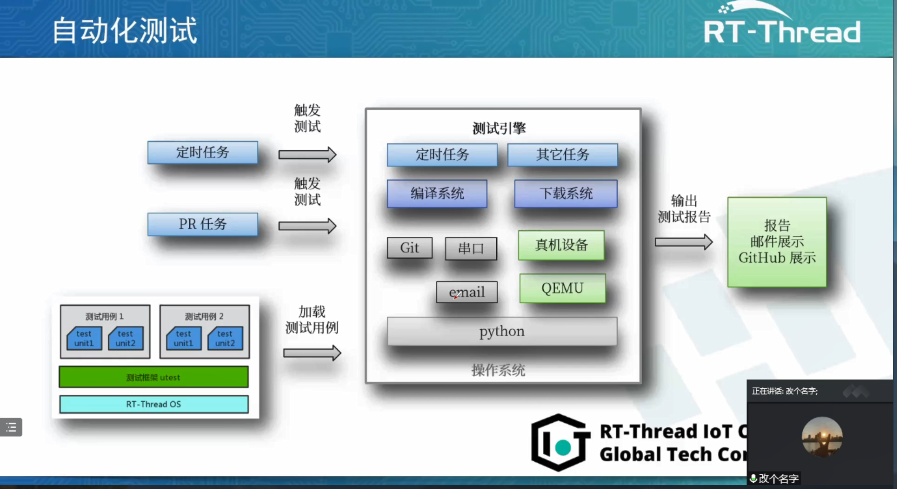
RT-Thread全球技术大会:RT-Thread测试用例集合案例
RT-Thread全球技术大会:RT-Thread对POSIX的实现情况介绍

免费申请 | FRDM-MCXA156评测活动发布!

《恩智浦FRDM-MCXA156开发实践指南》上线啦
CherryUSB-HID设备实践 | 技术集结
明晚!基于RT-Thread 的 PID 控制实践,从驱动到算法到监控,一次学会!| 问学直播






 工商网监
工商网监
评论