 双手协调运动基于脑电如何解码更优?
双手协调运动基于脑电如何解码更优?

单手运动脑电解码概述
尽管当前基于脑电图的脑机接口在解码单手运动(如运动方向、速度)方面已取得显著进展,但其存在明显的功能局限性。这种单侧运动解码模式无法满足日常生活中普遍存在的双手协调任务(如搬运物体),从而限制了其在康复训练中实现完全功能恢复的效果。从神经机制上看,如图1(时间频率表征图)所示,单手运动主要引发对侧大脑半球的的事件相关去同步化活动,而同侧激活较弱,这种不对称的脑激活模式无法模拟和促进双侧脑半球协作这一对于双手协调功能至关重要的神经过程,因此不利于实现全面的上肢康复。
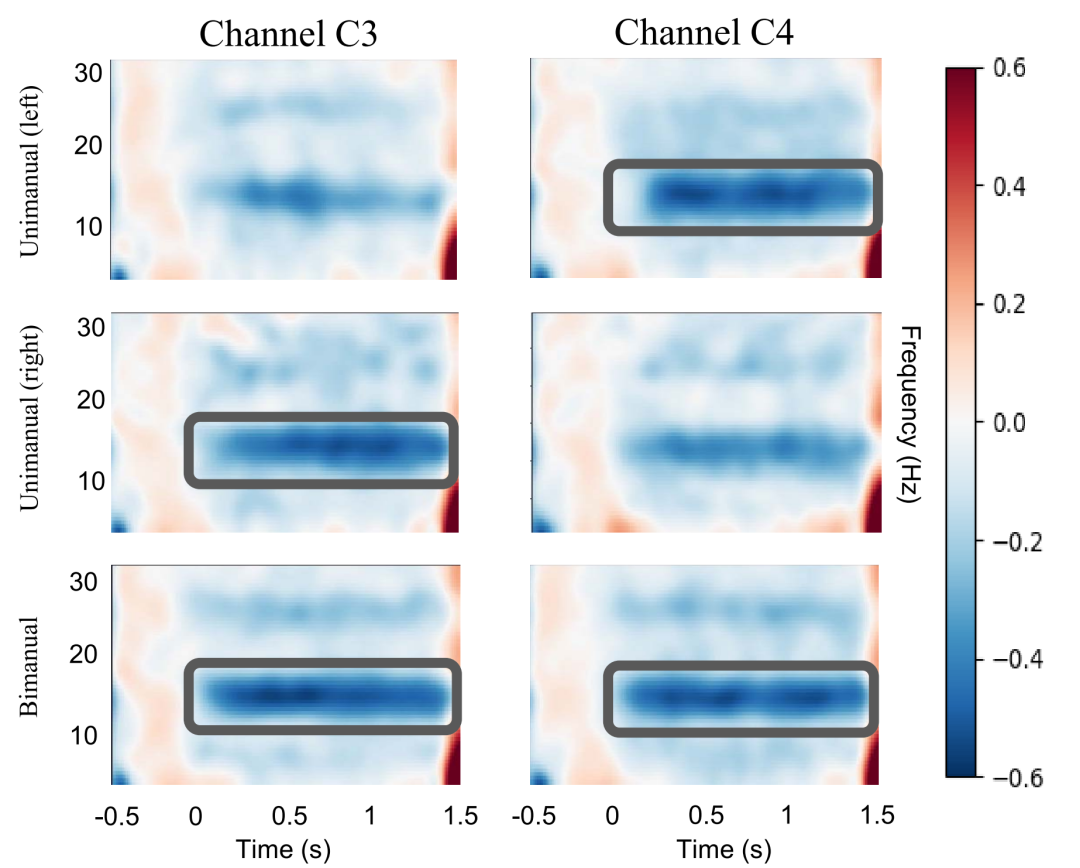
图1:单双手运动时间频率分析图(C3/C4通道)
图1从振荡神经活动的角度,揭示了单手与双手运动在执行时大脑激活模式的根本差异。单手运动(如左手动):在对侧脑区(即右手动在C3,左手动在C4)观察到强烈的ERD(蓝色区域),同时在同侧脑区有较弱的ERD。这完美符合神经科学的经典理论。双手运动:在双侧脑区(C3和C4)均观察到显著且对称的ERD。这表明双手协调运动需要两个大脑半球的协同激活,为“双手运动可能提供更丰富、更易解码的脑电信号”这一核心论点提供了关键的神经生理学证据。
HUIYING
双手协调运动脑电如何解码更优?
本研究的核心创新在于首次从非侵入性脑电图信号中成功解码了任务导向的双手协调运动方向,为康复机器人控制提供了新范式。与非常规的非对称正交双手运动不同,本研究采用的对称空间中的平行运动模式更贴近真实生活任务。其关键优势在于,双手协调运动能诱发更显著且更具区分度的大脑活动。如图2(地形图)所示,双手运动时在双侧大脑半球均观察到明显的对称性激活,这与单手运动的对侧优势形成鲜明对比。这种更强的双侧协同激活为解码模型提供了更丰富的信息,使得双手运动方向的解码准确率(如左 vs 右达86.28%)显著高于单手运动,展现出其在实现更自然、高效的多维康复机器人控制方面的巨大潜力。
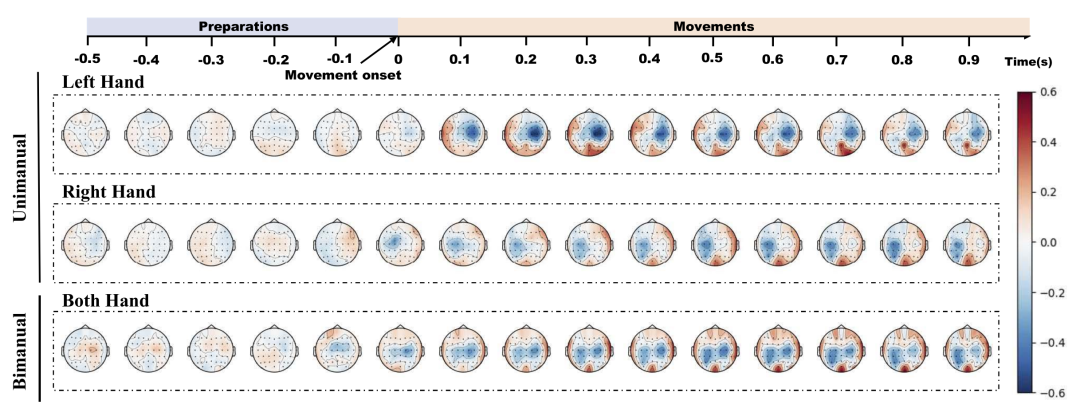
图2:运动起始前后脑电地形图序列
图2以动态空间视图的方式,展示了运动相关脑电活动的全脑拓扑分布。地图清晰地显示,在运动起始点(0秒)附近,脑电振幅发生明显变化。单手运动:激活主要集中在对侧大脑半球的中央区(C3/C4附近)。双手运动:激活模式呈现广泛的双侧对称性,覆盖了双侧的感觉运动皮层。此图从电位幅度(MRCP)的角度,与从振荡能量(ERD)角度的图1相互印证,共同证明了双手协调运动独特的、更强的双侧大脑激活模式。
HUIYING
任务导向的双手协调运动创新BCI范式
方法
实验设计:
如图3(实验设置与任务流程图) 所示,受试者需执行左、中、右三个方向的双手目标到达任务,同时作为对比,也执行左、右方向的单手任务。
图3(e)清晰展示了单次试验的时间线,包括准备、运动和休息等阶段,确保了实验流程的标准化。
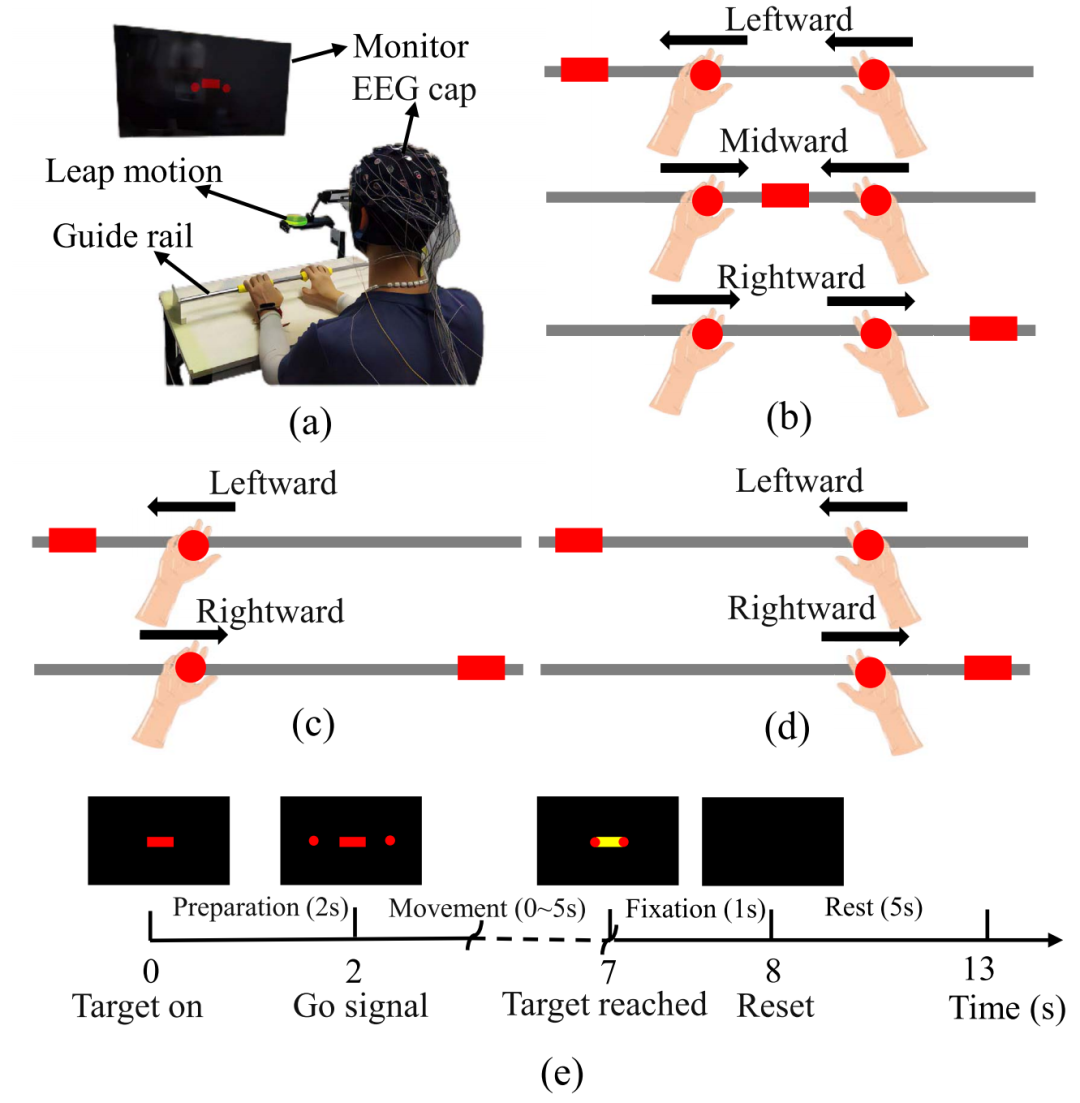
图3:实验设置与任务流程图
图3(a):实验场景实物图,此图证明了实验的严谨性和生态效度。它明确了实验是在受控的电磁屏蔽室内进行,确保了EEG信号的质量。导轨的使用保证了所有运动被限制在一维水平方向,简化了行为任务,便于与脑电信号对齐分析。
图3(b)-(d):任务视觉反馈示意图:这些子图清晰地定义了三种实验条件(双手左/中/右,单手左/右)。红色圆点代表实时手部位置,提供了即时的视觉反馈。这种设计巧妙地创造了任务导向的语境,即受试者的目标是“移动双手/单手,使圆点进入目标矩形”,而非执行抽象的肌肉收缩。
图3(e):单次试验时间线图:时间线是数据分段和分析的基础。它明确了“视觉提示出现”、“实际运动开始”(由Leap Motion定义)和“任务完成”等关键事件点,为后续EEG数据截取(如围绕运动起始点的-0.5秒到1.5秒)提供了精确依据。
数据采集:
使用64通道EEG系统记录脑电活动,采样率为256 Hz。
同时,使用Leap Motion控制器(图3a) 精确捕捉双手的实际运动位置和速度,为对齐脑电数据与行为数据提供基础。
解码模型:
提出了一个创新的CNN + BiLSTM混合深度学习模型。
图4(CNN-BiLSTM混合模型架构图) 详细展示了该模型的结构,它通过时序CNN块、空间CNN块和BiLSTM块,自动且高效地从EEG信号中提取时空特征。
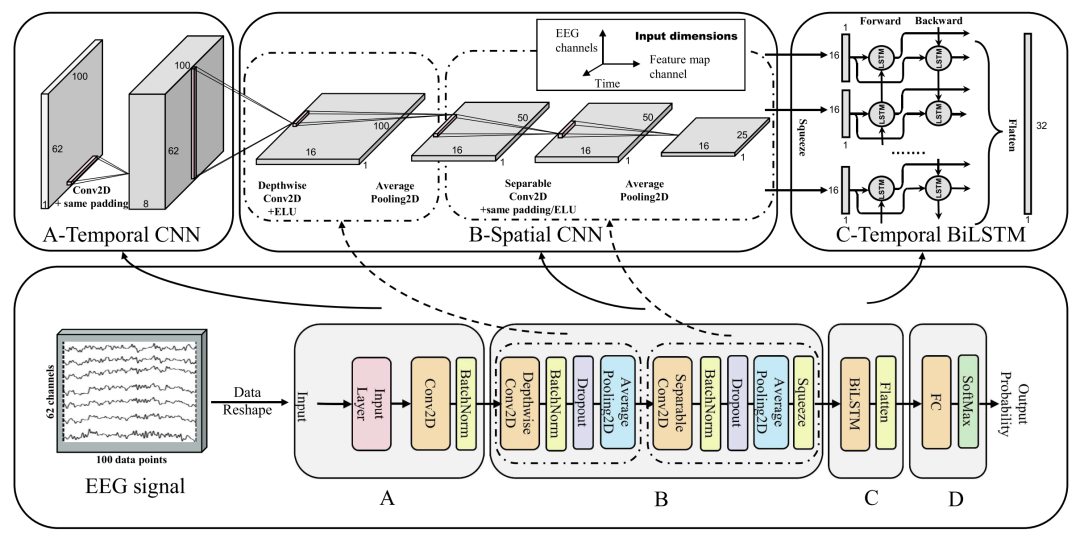
图4:CNN-BiLSTM混合模型架构图
图4形象地展示了模型如何自动、端到端地从原始EEG信号中学习。它结合了CNN擅长提取局部时空特征和BiLSTM善于建模长时程依赖的双重优势,避免了传统方法依赖人工特征工程的局限性,是该研究实现高解码精度的技术核心。
数据预处理:
流程包括带宽滤波(0.1-30 Hz)、坏道识别与插值、ICA去除眼电伪影、以及使用ASR算法去除运动伪影。
一个关键步骤是:利用Leap Motion数据确定每个试验的实际运动起始点,并将EEG数据与此点对齐。如图5(手部位置与视觉-运动反应时间示意图) 所示,这消除了个体反应时间差异的影响,确保了分析时间窗的准确性。
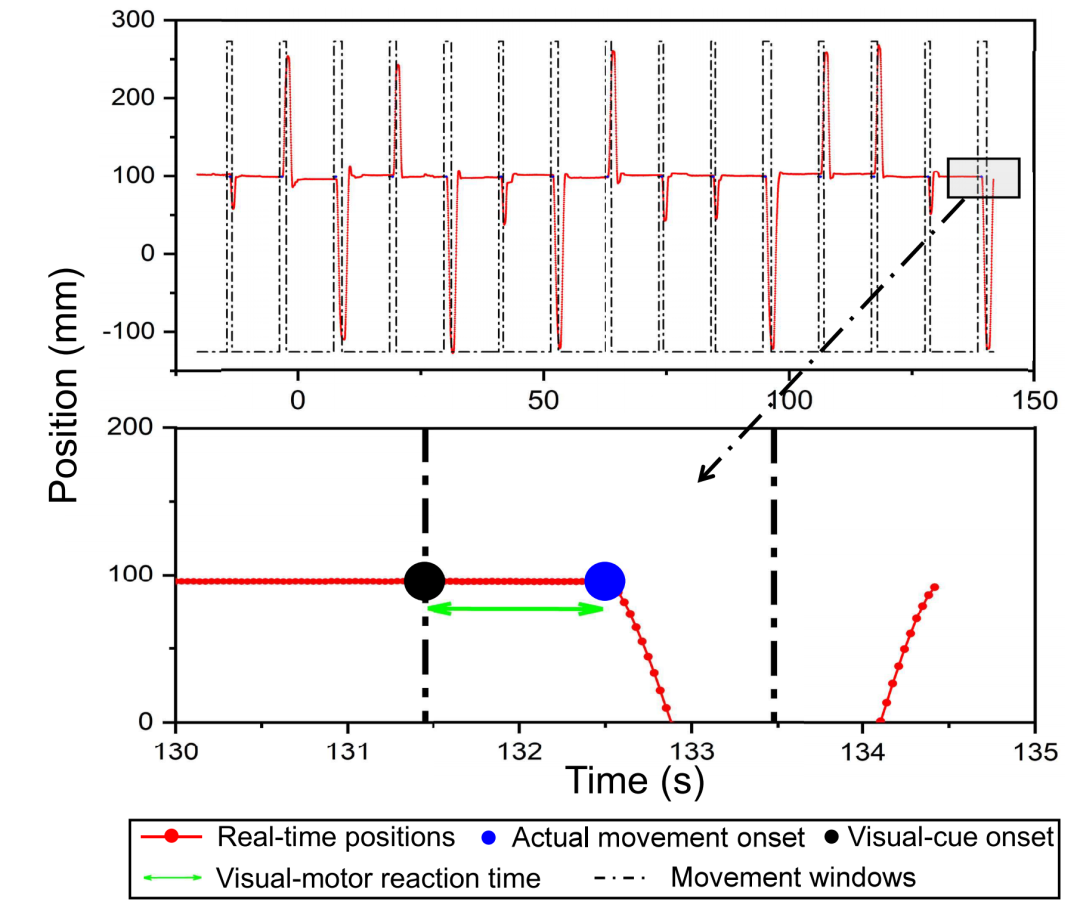
图5:手部位置与视觉-运动反应时间示意图
图5展示了在一次实验中,一位受试者左手位置的实时记录。垂直虚线分隔了不同的试验,每个试验中都有一个黑色的点(视觉提示出现)和一个蓝色的点(由算法判定的实际运动开始)。绿色的双箭头清晰地标示出了视觉-运动反应时间,即从看到指令到身体开始行动之间的延迟。这个延迟因人、因试验而异。图5有力地证明了,如果以视觉提示出现为基准对齐数据,那么运动相关的脑电信号(如MRCP)在不同试验中将会是“不同步”的。因此,使用Leap Motion确定实际运动起始点(蓝色点) 并对齐数据,是确保分析准确性的关键预处理步骤
结果
三分类解码性能:
对左、中、右三个协调方向进行多分类,平均峰值准确率达到 73.39% ± 6.35%,显著高于随机猜测水平。
二分类解码性能:
在双手运动内部进行两两方向的二分类,准确率分别为:
左 vs 中:80.24%
右 vs 中:82.62%
左 vs 右:86.28%
解码性能的时间动态:
图6(分类准确率随时间变化曲线图) 是关键结果的可视化。该图显示,解码准确率在实际运动发生之前(即视觉-运动反应时间内)就达到了峰值(图中红色与绿色圆点)。
这证明了解码模型能够从运动准备和执行早期阶段的脑电信号中成功解码出运动意图。
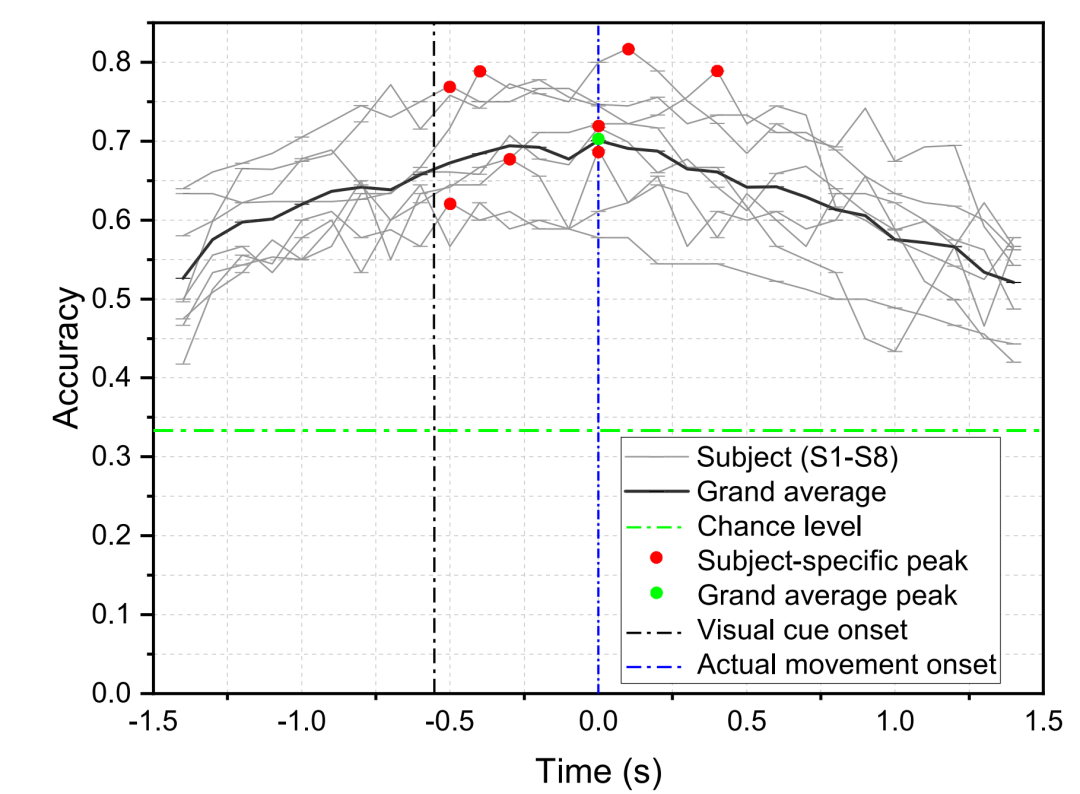
图6:分类准确率随时间变化曲线图
图6:本研究最重要的结果图之一,它揭示了解码性能与运动时间进程的动态关系,并确定了最佳解码时机。该图绘制了八位受试者及其平均(粗线)的分类准确率,这些准确率是基于一个1秒长的滑动时间窗计算得出的,时间窗的起点在横轴上从-1.4秒变化到1.4秒(以实际运动起始为0秒)。
红色圆点:每位受试者的个体峰值准确率及其出现的时间点。它们大多分布在0秒之前。
绿色圆点:基于固定时间窗(0-1秒)计算的总体平均峰值准确率。
关键发现:最高的解码准确率发生在实际运动发生之前和运动早期。这具有巨大的应用价值,因为它意味着BCI系统可以在用户刚刚开始执行动作甚至还在准备时就识别出其运动意图,从而实现前瞻性、低延迟的实时控制。
双手 vs. 单手解码性能对比:
对相同的左、右方向进行分类时,双手运动的解码准确率显著高于单手运动。
这一结论在图7(统计对比图) 中通过了严格的统计检验,证实了双手协调运动能为BCI解码提供更具判别性的神经信号。
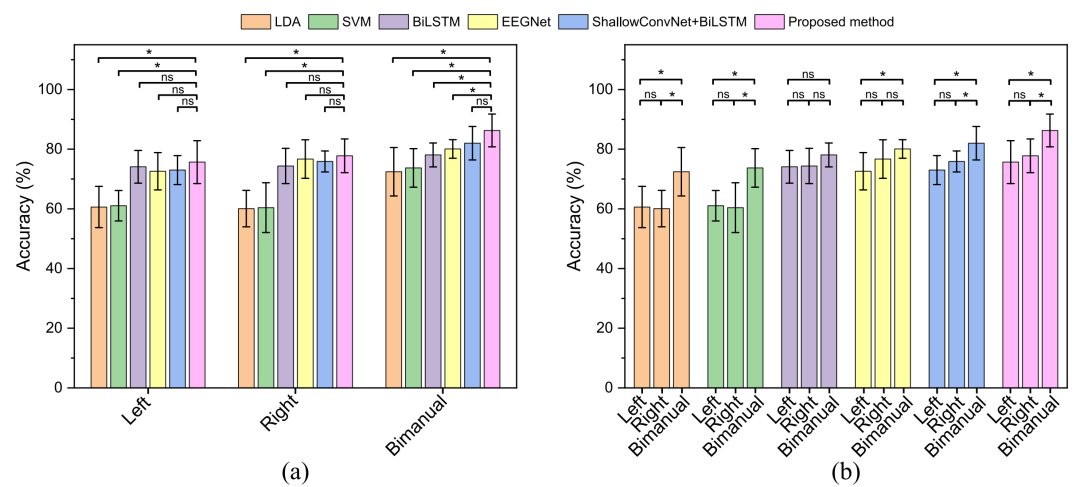
图7:不同模型与运动条件下解码性能统计对比图
图7从统计学上验证了本研究提出的模型相较于基线模型的优越性,以及双手运动相较于单手运动在解码上的优势。图7(a):不同模型性能对比,带有显著性标记(*)的图表明确显示,本研究提出的模型在几乎所有条件下都显著优于传统方法(LDA, SVM),并且在双手任务上显著优于其他深度学习模型。这直接证明了所提出的CNN-BiLSTM混合架构的有效性。图7(b):不同运动条件性能对比,带有显著性标记的图表明确显示,对于大多数模型(尤其是本研究提出的模型),双手运动的解码准确率显著高于任一种单手运动。这从统计学上坚实支撑了本研究的核心结论:解码双手协调运动不仅可行,而且比解码单手运动更具优势。
HUIYING
总结
本研究成功验证了从非侵入性脑电图信号中解码自然、任务导向的双手协调运动方向的可行性。所提出的CNN-BiLSTM混合模型表现优异,显著优于传统方法。更重要的是,研究发现双手运动比单手运动诱发了更显著的双侧脑激活,且解码准确率更高,这为开发新一代支持双侧协调训练的康复脑机接口系统提供了坚实的理论和实验依据,有望极大地推动上肢康复,特别是对于中风等需要恢复双侧功能患者的技术进步。补充:另外传统范式像是在做** gym 里的孤立肌肉训练**(例如,坐姿哑铃弯举),它针对性强,但动作单一,与实际生活中的推、拉、举等复合动作有差距。本研究的“任务导向”范式则像是在进行功能性训练或模拟真实工作(例如,搬运一个重物放到指定位置),它锻炼的是全身协调发力以及如何完成一个具体任务的能力。
HUIYING
回映产品
产品1:基于EEG/fNIRS便携无创脑脊接口设备(可ODM定制开发)
回映这款非侵入性脑脊接口整机设备是一个高度集成的闭环神经调控系统:
EEG脑电版本:其核心工作流程始于一个配备32个电极的便携式脑电帽,用于无创采集用户大脑感觉运动皮层的神经信号。这些信号被实时传输至内置的信号处理与计算单元,该单元运行着先进的机器学习算法(线性判别分析,LDA),能够从特定的脑电节律(μ波和β波)中持续解码出下肢的运动意图,并将其量化为一个实时的“运动概率”。一旦该概率值超过预设阈值,计算单元会即刻向经皮脊髓电刺激器发出触发指令。刺激器则通过精准贴附于使用者背部T10脊髓节段和腹部的电极,输送出与运动意图同步的、特定参数(如30Hz,10-15mA)的电刺激,以激活脊髓神经网络,辅助运动完成。整个系统通过统一的硬件同步机制,确保了从“意念识别”到“脊髓刺激”整个环路的时间精度,最终形成一个由“大脑意图驱动、脊髓刺激辅助”的一体化康复设备,旨在通过这种精准的闭环干预促进脊髓损伤患者的神经功能重塑与运动功能恢复。
fNIRS版本:通过精准布置于用户大脑感觉运动皮层的少数光学探头(光源与探测器),无创采集皮层活动引发的血红蛋白浓度变化信号。这些信号被实时传输至内置处理单元,该单元运行经过验证的专用算法,能够从特定的血液动力学响应中(如氧合血红蛋白的上升斜率与幅值)持续解码出下肢的运动意图,并将其量化为一个实时的“运动准备状态”指标。一旦该指标超过预设阈值,处理单元会即刻向经皮脊髓电刺激器发出触发指令。刺激器则通过贴附于使用者背部T11-L1脊髓节段的电极,输送出与运动意图同步的、特定参数的电刺激,以激活脊髓中枢模式发生器。整个系统通过硬件同步,确保了从“脑血氧信号识别”到“脊髓神经调控”环路的时间耦合,最终形成一个由“大脑运动皮层激活驱动、脊髓刺激执行辅助”的一体化康复设备,旨在通过这种与生理响应同步的闭环干预,促进脊髓损伤患者的神经功能重塑与运动环路重建。
产品2:单通道肌电/心电/呼吸采集设备
单通道肌电/心电/呼吸采集设备创新性地采用type-C转脑电电极以简单轻便的方式实现了单通道肌电/心电/呼吸采集,且基于结构与硬件的特殊设计,支持高原环境下进行采集。另外产品总体结构采用魔术贴设计,方便于全身佩戴。
适用领域:单通道生理参数采集
 单通道肌电/心电/呼吸采集设备
单通道肌电/心电/呼吸采集设备
产品3:基于干电极的32通道脑电采集仪
高质量脑电信号采集对于精准识别和分析非癫痫样异常(如弥漫性慢波、局灶性δ活动)至关重要。为此可以了解我们研发的一款32通道可穿戴脑电采集仪,采用高精度干电极采集脑电信号,无需导电膏即可快速佩戴,极大提升了受试者的舒适度和操作效率,特别适合长时间或动态环境下的数据采集。该设备不仅能通过全覆盖设计捕捉全脑电活动细节,还采用了type-C智能转接技术和抗干扰硬件架构,有效减少了运动噪声和电磁干扰对信号的影响,在高原或移动场景中也能稳定输出低噪声波形。
适用范围:多通道生理参数采集
产品4:便携式TI时域干涉经颅电刺激仪
便携式TI时域干涉经颅电刺激仪通过紧密接触于头皮的电极传导两路不同频率的高频脉冲电流(如:2000Hz和2010Hz),高频电流流经大脑表层和深部区域,并在脑深部干涉产生低频包络(如:10Hz),由于大脑神经元对高频(>1000Hz)电刺激不响应,所以位于大脑表层的高频电流并没有对大脑产生刺激效应位于脑深部的低频包络刺激大脑,实现无创地刺激大脑深部而不影响大脑皮层,即无创脑深部电刺激。
回映便携式时域干涉电刺激设备支持传统的tTIS时域干涉电刺激模式(基于正弦波),PWM-TI时域干涉电刺激模式(基于50%占空比方波),burst-TI时域干涉电刺激模式,细分为tTI-iTBS,tTI-cTBS两种模式(基于iTBS,cTBS).
适用范围:
能够应用于对老年痴呆、癫痫、帕金森、抑郁症等多种神经系统疾病治疗和神经科学研究的多个领域。
回映便携式TI时域干涉经颅电刺激仪设备示意图
-
医疗电子
+关注
关注
31文章
1465浏览量
92280 -
脑电
+关注
关注
0文章
22浏览量
7333
发布评论请先 登录
ADS1299为什么测量不到脑电信号?如何解决?
【TL6748 DSP申请】脑电放大器
什么是运动控制系统
如何更好地协调运行多电机同步系统
基于图像的NAO机器人松协调运动研究
VR和协调训练可以加强肌肉和大脑通路,发展运动能力和促进身体健康
脑机接口新技术:意念操控键盘,解放双手

脑电伪迹系列之脑电伪迹处理与技术剖析

脑电基础系列之脑电电极的分类与技术对比



评论