 Toshiba东芝TB67S109AFNAG炒菜机器人的应用体验
Toshiba东芝TB67S109AFNAG炒菜机器人的应用体验

最近我们在开发一款炒菜机器人,电机驱动部分选用了东芝的TB67S109AFNAG芯片。用下来感觉非常不错,特意来分享一下实际使用中的几个亮点:
高精度微步进控制
芯片支持最高1/32 步进,配合 PWM 恒流驱动,使得搅拌动作非常平滑,几乎没有顿挫感。这对于炒菜过程中需要细腻控制的场合(如慢速搅拌、精准投料)非常有用。
低发热、高效率
采用 BiCD 工艺,上下桥 MOS 总内阻只有0.49Ω,发热控制得很好。我们连续运行半小时,电机驱动部分温度依然可控,不需要额外加散热片,省了不少空间和成本。
灵活的电流控制
通过 VREF 引脚外接电阻即可设定输出电流,方便适配不同扭矩的电机。我们用的是 24V 供电,最大电流调到 3A,推动搅拌电机绰绰有余。
丰富的保护功能
芯片自带过热保护(TSD)和过流保护(ISD),还有电源复位(POR)功能。在实际调试中,偶尔因为机械卡顿导致电机堵转,芯片能快速切断输出,避免烧电机或驱动电路。
CLK 脉冲控制,接口简单
直接用 MCU 的 GPIO 发脉冲就能控制步进量和方向,不需要复杂的通信协议,节省了代码资源和开发时间。
多细分选择,适应性强
支持全步、半步、1/4、1/8、1/16、1/32 等多种细分模式,我们根据不同的炒菜阶段(如快速翻炒 vs. 慢速搅拌)动态切换细分模式,效果很好。
总结一下:
TB67S109AFNAG 是一款非常扎实的步进电机驱动芯片,特别适合需要高精度、高可靠性电机控制的场合。我们在炒菜机器人项目中用下来,稳定性、控制精度和发热表现都超出预期。
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
30643浏览量
219847 -
步进电机驱动
+关注
关注
1文章
47浏览量
15256
发布评论请先 登录
相关推荐
热点推荐
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
瑞芯微RK3576 AIoT处理器处理器凭借其卓越的多屏异显与8路摄像头接入能力,为机器人领域带来革新。米尔电子MYD-LR3576开发板实测数据显示,在高负载下CPU占用仅34%,完美实现多路视觉
发表于 10-29 16:41
小萝卜机器人的故事
经过我的申请,
马老师发放了,
小萝卜机器人的,
开发权限,
原来的小萝卜公司,
因为经营不善倒闭,
作为科研产品,
几个技术对此惋惜,
自掏腰包,
要让小萝卜机器人,
再生,
每次听到小萝卜说
发表于 10-23 05:24
自制巡线解迷宫机器人(上)
为原理验证机且为了提高项目整体的开发速度,机器人的所有元器件均采用TB上的现有模块,并使用洞洞板直接焊接的方式来构建其机械结构和电气连接。
在软件层面上,该机器人内部集成有经典的PID闭环控制算法,可根据
发表于 10-20 10:39
什么是机器人?追溯机器人技术的演变和未来
作者: Aswin S Babu 什么是机器人? 在日常生活里,“机器人”一词我们都不陌生,日常交谈中也常常脱口而出。但大家可曾细想过,这个词的真正含义究竟为何?接下来,不妨花些时间,深入探究

聊聊东芝TB67S109AFTG芯片在钓鱼设备上的应用体验
最近几个客户在研究自动钓鱼器和遥控钓鱼船的电机驱动方案,试用了东芝的TB67S109AFTG这款步进电机驱动芯片,感觉有些特点值得和大家分享交流。 芯片基本情况 TB67S109AFTG是一款两相双
工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22
华数机器人全新推出70kg负载机器人HSR-JR670-2100
华数机器人全新推出70kg负载机器人HSR-JR670-2100,该产品基于"高速、高精、高稳定"三大核心技术优势,配备全机身IP67防护等级+定制防爆设计,让机器人在粉尘、水汽、甚至
盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-
发表于 05-13 15:02
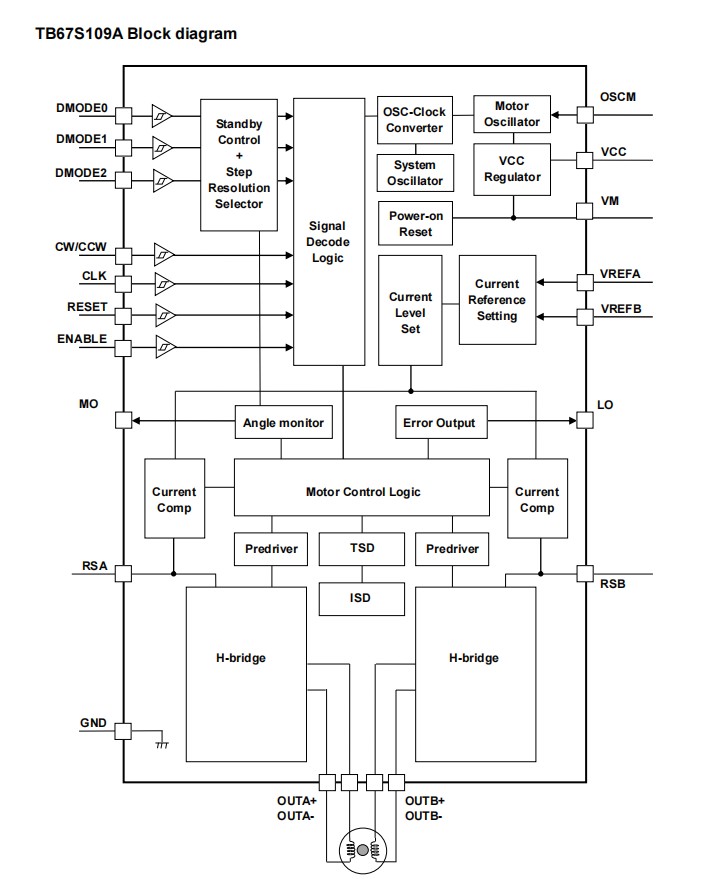
TB67S109AFTG, TB67S109AFNG是一款采用PWM斩波器的两相双极步进电机驱动器内置有时钟输入解码器。采用BiCD工艺制造
TB67S109A是一款两相双极步进电机驱动器,采用PWM斩波器。解码器的时钟是内置的。采用BiCD工艺制造,额定值为50V/4.0A。
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
ROS的全称:Robot Operating System 机器人操作系统
ROS的 目的 :ROS支持通用库,是通信总线,协调多个传感器
为了解决机器人里各厂商模块不通用的问题,让机器人快速开发
发表于 04-30 01:05
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
具身智能机器人的基础模块,这个是本书的第二部分内容,主要分为四个部分:机器人计算系统,自主机器人的感知系统,自主机器人的定位系统,自主机器人
发表于 01-04 19:22
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
近年来,人工智能领域的大模型技术在多个方向上取得了突破性的进展,特别是在机器人控制领域展现出了巨大的潜力。在“具身智能机器人大模型”部分,作者研究并探讨了大模型如何提升机器人的能力,大模型存在
发表于 12-29 23:04
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
感谢
感谢电子发烧友网社区给予《具身智能机器人系统》试读机会。在这知识的盛宴中,我感受到社区的关怀与支持。定不负期望,认真研读,分享所学,回馈社区。
一、本书大纲
《具身智能机器人系统》是一本
发表于 12-28 21:12
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》 一书由甘一鸣、俞波、万梓燊、刘少山老师共同编写,其封面如图1所示。
本书共由5部分组成,其结构和内容如图2所示。
该书可作为高校和科研机构的教材,为学生和研究人员提供系统
发表于 12-20 19:17





 工商网监
工商网监
评论