 借助3D数字孪生进行自动驾驶仿真
借助3D数字孪生进行自动驾驶仿真

*本文内容采用了机器翻译
近 200 名大二学生聚集在早稻田大学宽阔的教室里。学生们准备好笔记本电脑,参加基于项目的学习高级讲座系列,这是机械工程系的一门必修课程,通过项目作业教授专门的解决问题的技能,以提高能力。
草鹿仁教授在环境与出行部分展示了使用 Simulink 和 RoadRunner 为串联混合动力电动汽车 (SHEV) 创建的驾驶员模型。SHEV 是一种带有内燃机和电池供电电动机的电动汽车,该车辆正在大学附近绕行。学生学习如何操作集成模型并进行仿真以获得燃油经济性评级。随后他们与同学们讨论如何提高燃油效率。
“当车辆仿真输出的数字只是简单地以图表形式呈现时,大多数学生无法想象驾驶汽车的感觉。”草鹿教授说道。“我们试图激发他们的想象力。”
草鹿教授是著名的机械工程教授,领导早稻田大学下一代汽车研究机构(https://www.waseda.jp/inst/nextgv/en/about/overview),在日本汽车界颇具影响力。他在日本汽车工程师学会担任技术总监和副总裁。在早稻田大学读研究生期间,他与丰田汽车公司总裁佐藤恒治一起进行甲醇发动机的研究。
草鹿教授在系列讲座中挑战学生们像汽车工程师一样思考,专注于优化燃油经济性和电力成本。其目标是让学生为汽车行业的职业生涯做好准备,早稻田大学与汽车行业保持着密切的联系。几家日本主要汽车制造商的总部都在附近,校友包括丰田、日产和五十铃等跨国公司的高管。
“我们与汽车公司、汽车相关公司、重工业、政府机构以及汽车内燃机技术研究协会(AICE)合作开展研究项目,”草鹿教授说道。他的实验室与 AICE 有一个联合绿色创新项目,开发使用电子燃料的混合动力汽车的催化剂。这个国家组织致力于促进学术界、政府和工业界之间的合作。他还为地方和国家政府委员会提供排放和燃油经济性方面的建议。
“从环境保护的角度来看,全球的排放和燃油经济性法规变得越来越严格,”草鹿教授说。“汽车公司需要生产符合这些法规的汽车。”
考虑到这一点,草鹿教授和原田空樹(草鹿实验室进行汽车动力系统研究的二年级硕士生)在系列讲座中使用了早稻田的 MathWorks Campus-Wide License,并选择了 Simulink 和 RoadRunner,因为它们具有先进的功能和易用性。
实验室团队首先驾驶一辆 2016 款 Nissan Note e-POWER 在大学附近预定路线上行驶。原田将这些道路测试中的交通信号和地图数据以及其他关键公共信息(例如道路海拔和速度限制)拉入 Simulink 驾驶员模型中。他使用 RoadRunner 复制街景。原田、助教 (TA) 和 MathWorks 员工教学生操作集成模型并运行仿真。学生可以有效地重现真实的道路和交通环境来确定燃油经济性等级。
“学生们在课堂上实现了多个目标,”草鹿教授回忆道。“他们的想法之所以能够实现,是因为他们可以通过 RoadRunner 动画看到车辆实际行驶的景象。”
严格的真实世界测试
在课堂之外,此类仿真对于评估新型乘用车的燃油经济性和电力成本具有巨大的前景,有可能为汽车制造商节省大量 R&D 时间和成本。汽车工程师在计算燃油经济性时会考虑现实世界的道路状况。重要因素包括车辆重量、加速度、减速度、坡度阻力和滚动阻力。随着车速的增加,空气阻力也会变得更大。
草鹿教授的研究在底盘测功机上将新兴的实际驾驶排放 (RDE) 测试与传统的全球统一轻型汽车测试程序 (WLTP) 进行了比较。RDE 测试旨在补充实验室测试,通过公共道路上行驶的乘用车上的便携式实时监测设备测量一氧化碳、未燃烧的碳氢化合物、氮氧化物和颗粒物。测试在不同的环境、不同的温度范围、速度限制、交通水平和高度下进行。
草鹿教授指出:“传统底盘发电机测试和实际驾驶中的废气和燃油效率存在差异。”“可以更精确测量的 RDE 变得越来越重要。”
在日本等强制要求新车必须具备 RDE 功能的国家,符合系数(CF)表示实际道路行驶过程中的废气值与台架试验测得的废气值之间的差异。监管机构设定了 CF 限制,汽车公司必须证明实际道路上的废气值不超过该限制。
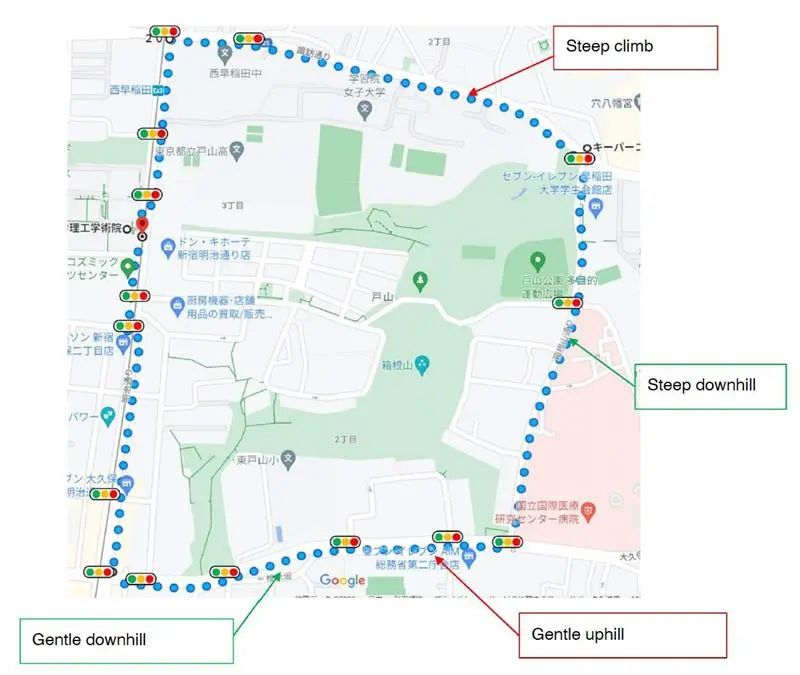
绘制车辆测试路线。(图片来源:早稻田大学)
“在 90 至 120 分钟的实际道路驾驶过程中,车辆必须按照一定比例在城市道路、乡村道路和高速公路上行驶。还有其他限制,例如温度、高度和最大速度的上限,”草鹿教授解释道。“昂贵的重新测试并不罕见。”
草鹿教授继续说道,使用 Simulink 和 RoadRunner 进行仿真可以提前预测性能,无需购买昂贵的专用测量设备并在实际车辆上进行测试。此外,找到与 RDE 测试具有相同道路、温度和海拔的地点是不可能的。
他说道:“基于模型的设计的 RDE 仿真非常容易实现。”他的课堂即将证明这一点。
3D 数字孪生
草鹿教授选择了 2016 款日产 Note e-POWER,因为已经开发出了高度精确的模型,而且他认为学生可以理解 SHEV 的简单结构。位于大学附近新宿区的测试路线为一条长约 2.7 公里(1.7 英里)的环路,有不同程度的上坡和下坡。
驾驶测试于凌晨 1 点进行,以尽量减少其他车辆和行人,实验室团队有意没有将其纳入 RoadRunner Scenario 和 Simulink 协同仿真中。初始充电状态设定为 60.0%。每位驾驶员在测试前都对车辆进行 20 分钟的预热,以确保发动机处于热机状态。车载 GoPro 获取 GPS 信息,而诊断工具收集车辆基本数据。
原田在 Simulink 中创建了一个驾驶员模型,使用自动驾驶算法来仿真人类在路线上加速和减速的方式。
他从经济产业省主导的项目创建并发布的模型中获得了 SHEV 信息。然后,他上传了日产 Note 组件的实际效率和控制流数据。
他从带有时间戳的测试路线视频中将所有 16 个交通信号灯的数据添加到 Simulink 中。计算会自动确定哪个灯位于虚拟车辆前方以及距离最短,类似于人类驾驶员观察最近的灯的方式。他构建了两种可能的刹车控制场景:恒定减速或突然停止。
仿真中的交通灯只能是红色或绿色。视频中的黄灯时间被划分为一半,一半分配给绿灯,另一半分配给红灯。原田在 RoadRunner 中设计了逼真的 3D 街景。
“我从 OpenStreetMap 获取了该地区的地图数据以及日本地理空间信息管理局提供的坡度数据,”他说。“将其上传到 RoadRunner 后,我仅提取道路就创建了 3D 数字孪生。在可视化界面中工作非常直观。”
学生们从大学云端下载了组合驾驶模型。回到教室,原田、助教和 MathWorks 团队回答了有关 3D 数字孪生的问题。然后轮到学生了:他们的任务是根据他们唯一的学生证号码的最后三位数字,以鸟瞰摄像机位置制作整个驾驶仿真的视频。例如,123 表示摄像机距离 12 米,高度 3 米。
他说,此前,草鹿教授的学生依靠计算出的充电状态图,有些学生难以将计算结果与实际车辆驾驶联系起来。这一次他们能够看到结果了。
提高效率
通过 3D 数字孪生仿真,学生们了解了通过改变初始充电量与 SHEV 高压电池充电深度相关的动力系统控制。之后,他们可以比较插电式和串联混合动力电动汽车的成本和 CO2 排放。
“与真实车辆测试不同,基于模型的设计可以轻松测试车辆差异。上这门课的学生亲眼目睹了如何利用插电式混合动力汽车来改善燃料消耗。”草鹿教授说道。“能够将这项练习分配给二年级本科生班级真是太棒了。”
草鹿教授注意到,与前几年相比,学生们使用 Simulink 和 RoadRunner 的数据分析和解释能力有所提高。他们确定改变滚动阻力、改变空气阻力和提高发动机的热效率是热能转换效率的因素。一些人还提出了一些有关发动机控制的先进想法。
原田说:“利用基于模型的设计和 Simulink,学生们探索了如果热效率提高到 50% 或实施插电式混合动力系统对燃油效率的影响。”
研究小组发现,将发动机运行区域的热效率提高到 50% 左右可以将燃料消耗降低到 21.52 兆焦耳,比基线降低 37%。学生们获得了可以在现实世界中应用的汽车知识。
“懂得如何使用基于模型的设计进行汽车研发的工程专业毕业生将可以立即开始工作,”K原田说道。毕业后,原田将加入丰田汽车公司,他期待利用基于模型的设计和设备测试来开发汽车,并直接借鉴
他在实验室的经验。
最近,草鹿教授实验室开始了在冷启动期间通过提前预热发动机来提高插电式混合动力汽车的热效率和废气排放的研究。RDE 测试支持比 WLTP 测试更宽的温度范围,因此冬季启动可能会产生连锁反应。该团队还计划扩展系列讲座的驾驶员模型,以纳入加速和减速对燃油效率的影响。加速和减速时考虑的因素包括行人、其他车辆和弯道。
研究人员预计他们的行业合作伙伴将从 Simulink 和 RoadRunner 中受益匪浅。
草鹿教授表示:“如果汽车的所有部件都用汽车制造商和供应商处理的通用模型来表示,那么预测零件发生变化时的性能就会变得更容易。”“我们相信基于模型的设计及其对车辆开发和 RDE 测试的仿真将大大有助于降低汽车公司的成本。”
全球 6,500 多所高校使用 MATLAB 和 Simulink 广泛开展各类工程和科学学科的教学与研究。目前,有 2,300 多所大学(包括全球 300 所顶尖大学中的 89%)可通过 Campus-Wide License 无限制访问所有 MathWorks 产品。
-
matlab
+关注
关注
189文章
3033浏览量
239520 -
自动驾驶
+关注
关注
795文章
15056浏览量
181991 -
数字孪生
+关注
关注
4文章
1704浏览量
14071
原文标题:在早稻田大学 × MATLAB:学生使用 3D 数字孪生进行自动驾驶仿真
文章出处:【微信号:MATLAB,微信公众号:MATLAB】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录


自动驾驶仿真测试场景生成方法:从技术突破到工程落地的全维度解析
自动驾驶场景生成方法及优选方案:康谋aiSim 3DGS方案重塑行业标准
高校自动驾驶研究新基建:“实测 - 仿真” 一体化数据采集与验证平台

aiSim领衔!国内外自动驾驶仿真软件大全:热门推荐与选择指南
自动驾驶仿真软件推荐:康谋aiSim——ISO 26262 ASIL-D 认证的高保真选择

端到端智驾仿真软件推荐:全球首款ASIL-D认证平台助您突破自动驾驶测试瓶颈
立体视觉和激光雷达在3D智驾感知领域的差异分析

自动驾驶中端到端仿真与基于规则的仿真有什么区别?
讲讲如何闭环自动驾驶仿真场景,从重建到可用?

生成式 AI 重塑自动驾驶仿真:4D 场景生成技术的突破与实践

浅析4D-bev标注技术在自动驾驶领域的重要性
搭建完整的ADAS测试链路,推动自动驾驶技术的安全发展



评论