 装修电销获客艰辛,回访力不从心,是时候让电销机器人出马了
装修电销获客艰辛,回访力不从心,是时候让电销机器人出马了

小可是G装修公司的电销主管,那天在交流如何做电话回访时,小可说:“员工不太愿意去做这件事,有时候应付差事一样打了,语气很生硬,没说两句,顾客就挂了电话。”
“另外,有时候嘛,打电话给顾客,顾客不太乐意,也有一些顾客不接,有的接了说在忙,也有一部分顾客是非常感谢的,但是总体来说有点难!”
小可给小编展示一份前几天打电话的名单,注明了接与未接,有约1/3的是没有接的,在名单边上,是一份“标准话术”,即打电话给顾客时应该怎样说,小编想,这位员工在打电话的时候,可能就是照着标准话术念给顾客听的,而这并不是我们所想要的!
针对装修,电话回访意向客户是可行且简便的一种方式,但是却忽略了这里面潜在的问题。
我们看到小可的难处,其原因在这样几点:
一、 回访客户名单缺少
电销业的意向客户客户基本都是通过海量外呼获客,筛选的意向客户再由人工进行回访。小可现在的问题就是专业电销人员少,流失率大,每日呼出量少,可供回访的客户少。
小编建议小可可以使用Yeta电销机器人帮助获客,全新人工智能落地产品,自主外呼,人机交流,每天1000通电话,超高效率,始终100%热情工作,效果好。
二、员工电话回访心态
Yeta电销机器人筛选的客户,交给人工回访,但是部分员工并不乐于回访,只是完成交差就好了,所以,打了,没人接,那就不是自己的事;打了,顾客不高兴,那也不是自己的事;打了,与顾客聊不到一块,也不是自己的事。
而电话回访的目的是为了跟进客户,旨在成单,没有很好的积极性,效果就另当别论了。
三、电话回访技巧缺失
电话沟通,是需要较多的技巧的,包括怎样通过声音来了解顾客,怎样传递自己的善意,怎样在电话取得顾客的信任,这些都是需要一些技巧培训才能实现的。
四、标准话术是否可行
电话沟通已经有一道天然屏障——看不见,再加上生硬的话术,更会让人觉得“奇怪”。
在与同事们进一步交流后,大家纷纷说出了一些建设性意见,整理如下:
1、用方言,像平常说话一样聊
这是被大家普遍认可的一种方法,打电话给顾客时,话语自然,先聊一聊,套套近乎,说一下客户购买的房子什么价格,地址位置在哪,之后再说一下专业的装修建议,这样很自然的话题,更容易被顾客接受。
如果是本地人用方言沟通,自然更好!
2、培训沟通技巧
这里,一是要注意时间的控制,员工在打电话时,对时间要有掌控意识,不能漫无边际,同时,对整个电话沟通的思路要很清晰。
在沟通中,不要着急,如果顾客正在忙,要理解,不能为了完成自己回访任务而匆忙说几句,可以换时间再打。
另外,一次性打电话不宜过多,因为一个人的精力也是有限的,打多了,耳朵也会疼,再说回访重在坚持,而不是一时兴起。
有了Yeta电销机器人的帮助,以及大家中肯的回访建议,一段时间以后,小可的业绩得到的质的提升,小编也由衷的为他感到高兴。
发布评论请先 登录
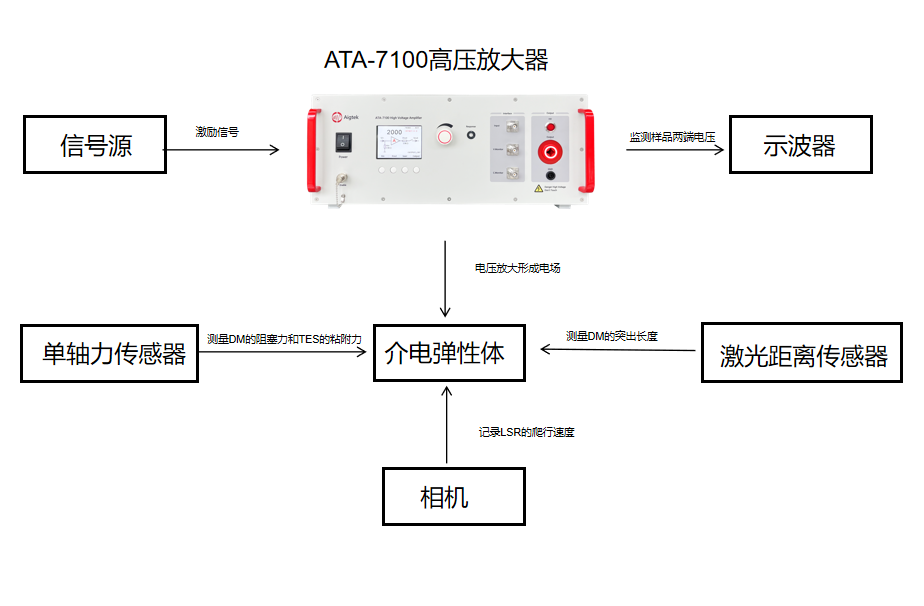
高压放大器在介电弹性体制成的软机器人研究中的应用
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
医疗术野新突破:MODBUS转CANOPEN网关打造高性能手术机器人通信骨架

介电弹性体软机器人研究:高压放大器的应用实践

工业机器人的特点
优必选中标近亿大单,自主换电人形机器人助力行业变革

盘点#机器人开发平台
凝心聚力 同行致远 | ZTMI致远仪器2025年分销会议圆满落幕






 工商网监
工商网监
评论