 针对涂胶,ABB机器人有专门的dispense软件
针对涂胶,ABB机器人有专门的dispense软件

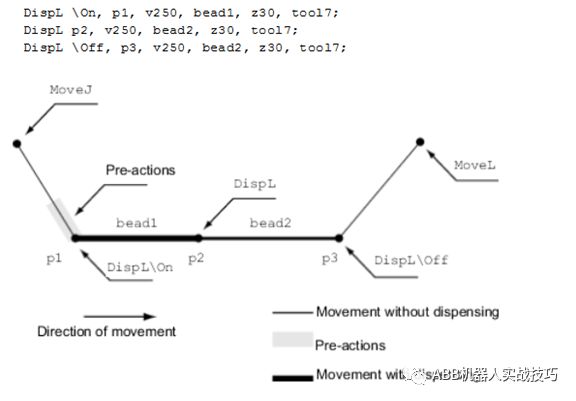
1)针对涂胶,ABB机器人有专门的dispense软件,也有对应的指令
2)主要指令有DispL和DispC,其中DispL为走直线,DispC为走圆弧
3)上述为
1)机器人走到p1点开始涂胶
2)P1到p2之间使用bead1涂胶参数
3)P2到p3使用bead2涂胶参数
4)到p3后关闭涂胶
4)Bead1参数如下
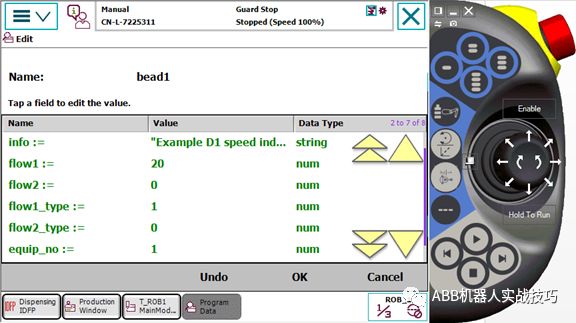
Flow1为流量,flow1_type为流量形式,其中1为 与速度无关(即机器人速度不论快慢,出胶量不变),2为与速度有关,即机器人出胶量会随着机器人运动速度快加大,速度慢减小
5)对应还有一个参数为equipdata
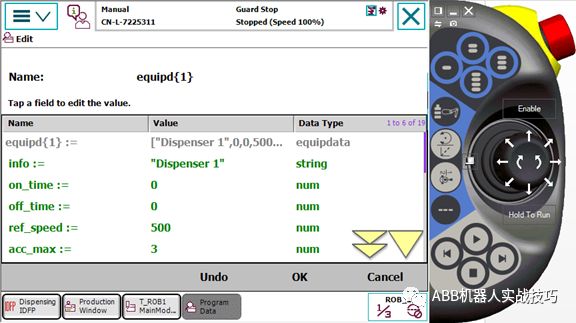
其中,ref_speed即为机器人参考速度。
如果bead数据里的flow1_type选择2,和速度有关。那么如果ref_speed为500,机器人速度实际也为500,出胶量就为设置的20.如果机器人实际速度为250(ref_speed的50%),出胶量就为实际的50%,即10。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31439浏览量
223626 -
指令
+关注
关注
1文章
624浏览量
37664 -
ABB
+关注
关注
26文章
573浏览量
57376
原文标题:干货 | ABB机器人涂胶指令与数据简介
文章出处:【微信号:GKB1508,微信公众号:工控帮】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
ABB IRB5400-喷涂工业机器人
` 本帖最后由 京五环以外 于 2015-1-14 11:17 编辑
ABB机器人IRB 5400是一个喷涂机器人家族,拥有喷涂精确、正常运行时间长、漆料耗用省、工作节拍短以及有效集成涂装设备等
发表于 01-14 11:16
ABB焊接机器人问题
我的ABB机器人做焊接用。机器人给焊机的doweldon信号正常,也与机器人内部的weldon信号映射过,但是在使用编程指令arcl /arclstart arclend等指令时不能工
发表于 10-16 23:07
ABB机器人维修保养指南
普遍需要在运行6000小时后进行一次保养,特别是针对在恶劣工况与长时间在负载极限或运行极限下工作的库卡机器人,则需要每年进行一次***ABB机器人保养。
发表于 08-19 10:32
ABB机器人驱动器相关故障维修型号有哪些?
ABB机器人驱动器相关故障维修型号有哪些?苏州吉海机电设备有限公司提供机器人售后服务(产业用机器人的保养、维护、维修等)、技术咨询等相关工作
发表于 10-10 16:02
ZNL-Z07多功能机器人实训工作站介绍
工艺、抛光打磨工艺、装配工艺等工业机器人*典型应用,不仅满足了职业院校不同专业学生针对工业机器人的操作和编程的教学需求,完全来源于工业应用现场的特征也使该工作站更加适合于作为职业技能竞赛平台。工作站深度集成了离线编程技术,
发表于 07-01 12:24
RobotStudio的介绍以及ABB机器人的位置及速度概述
RobotStudio是ABB机器人的离线仿真调试软件,还可支持VR体验。
今天就来好好介绍一下这款ABB机器人的专属强大
ABB的协作机器人强势登场
在今年春晚上潇洒挥毫的协作机器人——“阿福”,想必机器人界都不陌生。这款机器人是abb机器人于2015年推出的YuMi®协作
ABB机器人线速度_青岛ABB机器人发生电源故障维修
青岛ABB机器人发生电源故障维修工具:检查ABB机器人DSQC604故障指示灯LED已经亮起时,则表示ABB
发表于 01-11 13:32
•12次下载

abb工业机器人的编程语言是什么
ABB工业机器人的编程语言主要是RAPID(Robot Application Programming Interface for Development),它是一种高级编程语言,专门为工业机
abb机器人的基本配置包括哪些
ABB机器人是一种广泛应用于工业自动化领域的智能设备。它具有高度的灵活性、可靠性和精确性,可以完成各种复杂的任务。为了实现这些功能,ABB机器人需要进行基本配置。以下是



评论