 雅特力AT32F435:240MHz多轴伺服控制成本最优解
雅特力AT32F435:240MHz多轴伺服控制成本最优解

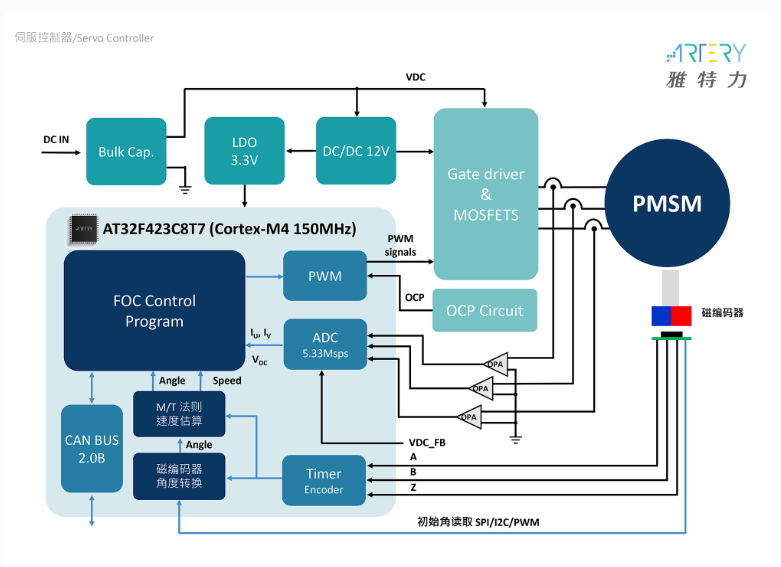
伺服控制系统的技术演进与核心需求
伺服控制器作为工业自动化领域的关键组件,正从基础运动控制向高精度、智能化方向演进。传统方案在应对高速响应(>650krpm/s加减速)、纳米级位置精度等需求时面临计算能力瓶颈。雅特力科技(Artery)推出的AT32系列MCU,通过Cortex-M4/M7内核+FPU+DSP指令集的异构架构,实现单周期乘加运算与硬件三角函数加速,将位置环控制周期压缩至10μs以内,满足工业伺服系统对实时性的严苛要求。
AT32 MCU的三大核心伺服控制优势
- 高精度信号链整合
- 集成5.33Msps 12-bit高速ADC(较传统1Msps ADC提升5倍采样率),配合可编程过采样滤波器,实现电流检测误差<0.5%;
- 支持霍尔传感器/磁编码器双模式角度反馈,内置磁编角度偏差自学习算法(补偿精度±0.1°),消除机械安装误差。
- 实时控制架构革新
- 通过M/T法速度估算器与自适应观测器,在零速至额定转速全范围内保持转矩波动<2%;
- 硬件触发ADC采样与PWM输出同步误差<5ns,确保SVPWM调制死区时间精准控制。
- 智能调参与通信融合
伺服专用功能模块深度解析
- 强健控制技术
负载惯量辨识精度达95%,结合前馈补偿算法,抑制阶跃扰动响应时间<50ms;
振动抑制功能可消除200Hz以内机械共振,提升设备寿命40%。
- 安全监控机制
三重保护电路:堵转检测(响应<1ms)、过流保护(±5%精度)、直流母线电压监控;
支持ISO 13849 PLc级安全认证,故障覆盖率>99%。
推荐型号与性能对比:
型号 | 内核 | 主频 | ADC通道 | CAN FD | 适用场景 |
AT32F423 | Cortex-M4F | 150MHz | 24×12-bit | 2×CAN 2.0 | 中小功率伺服(≤5kW) |
AT32F435 | Cortex-M4F | 240MHz | 32×12-bit | 2×CAN FD | 多轴联动控制系统 |
AT32F437 | Cortex-M7 | 480MHz | 32×12-bit | 3×CAN FD | 高速机器人关节控制 |
开发支持生态
- 硬件设计资源
- 软件算法库
- 开源FOC 5.0控制库(含MTPA/MTPF算法)
- 支持IAR/Keil环境下的一键电机参数辨识工具
行业应用拓展
该方案已成功部署于:
在“中国制造2025”推动下,雅特力AT32系列以“纳米级控制精度、微秒级响应速度、全栈式开发生态”三重优势,正重新定义下一代伺服控制系统的性能边界。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
单片机
+关注
关注
6078文章
45569浏览量
673302 -
MCU主板
+关注
关注
0文章
44浏览量
2319 -
雅特力
+关注
关注
1文章
195浏览量
9467
发布评论请先 登录
相关推荐
热点推荐
话说有没有大神用过雅特力单片机,看到介绍听说AT32F403A能跑到240M
话说有没有大神用过雅特力单片机,看到介绍听说AT32F403A能跑到240M下面的话摘自雅
发表于 11-10 22:07
「ICCAD 2020」雅特力即将参展中国集成电路设计业2020年会
,带来无与伦比的效能与丰富外设体验;● AT32F407: 同为240MHz高速CPU主频,集成兼容IEEE-802.3 10/100Mbps以太网口控制器并适用于物联网应用;2、终端产品应用此次展会,
发表于 12-01 17:58
FAQ0090 雅特力AT32F4xx系列独立PWM输出数量
FAQ0090 雅特力AT32F4xx系列独立PWM输出数量Questions: AT32F4xx 系列不同封装型号可以输出最多独立 PWM
发表于 05-11 19:44
AT32F435/437时钟配置
AT32F435/437时钟配置主要介绍两部分内容:1、基于雅特力提供的V2.x.x 的板级支持包来进行时钟源码的配置及修改2、如何使用配套的时钟配置工具来进行时钟路径及参数的设定,生
发表于 10-25 06:18
如何提升AT32F435/437性能
AT32F435/437 Performance Improvement描述了如何通过软件方法改善AT32F435_437的运行效能。
发表于 10-25 07:37
雅特力AT32F435/437 OTGFS应用笔记
AT32F435/437包含2个独立的OTGFS,编号OTGFS1和OTGFS2,本章将描述OTGFS支持的一些基本功能。 OTGFS1和OTGFS2特性完全相同。

雅特力推出全新开发软件工具,打造更完善的AT32 MCU开发生态
升级版BSP、Pack、ICP、ISP、ISPMulti-Port,相比于之前版本,新增支持雅特力新推出的AT32F435、AT32F437

出道即颠峰!雅特力发布超高性能AT32F435/437系列Cortex® -M4 MCU
12月1日,雅特力科技正式推出两款主频高达288MHz的AT32F435与AT32F437超高性
雅特力AT-SURF-F437全功能体验板,加速应用开发及产品量产
2021年年底,雅特力推出了AT32F435/437系列超高性能MCU,因其丰富的片上资源分配、高集成及高性价比特征,一经推出便受到广大工程师朋友的关注。为了让用户完整体验AT32F4

喜讯!雅特力AT32F435/437获选EE Awards Asia「亚洲区—年度最佳MCU/Driver IC产品奖」
领域工程师评选出最优秀的品牌和产品。今年雅特力AT32F435/437荣幸获选「亚洲区—年度最佳MCU/DriverIC产品奖」,得到亚洲区
AT32讲堂047 | 雅特力AT32F435/437 OTGFS应用笔记
OTGFS介绍AT32F435/437包含2个独立的OTGFS,编号OTGFS1和OTGFS2,本章将描述OTGFS支持的一些基本功能。OTGFS1和OTGFS2特性完全相同。图1OTGFS框图
雅特力AT32F435/F437入门使用指南
搭建AT32开发环境一、调试工具及开发板目前AT32F435/F437开发板都自带AT-Link-EZ调试工具,AT-Link-EZ如下图左边红框所示,它也可拆开后单独搭配其他电路板使用,支持IDE在线调试、在线烧录、USB转串口等功能。图1.AT-




评论