 电子齿轮比越大速度越快吗
电子齿轮比越大速度越快吗

在工业自动化领域,伺服系统的电子齿轮比是一个关键参数,它直接影响电机的运动性能。关于"电子齿轮比越大速度越快"这一观点,需要从工作原理、系统配置和实际应用三个维度进行深入分析,才能得出科学结论。
一、电子齿轮比的基础原理
电子齿轮比本质上是编码器反馈脉冲与指令脉冲之间的比例关系。当设定电子齿轮比时,实际上是在调整伺服驱动器对位置指令的响应灵敏度。以安川伺服系统为例,其电子齿轮比计算公式为:电子齿轮比=(编码器分辨率×机械减速比)/(丝杠导程×指令单位)。这个比值决定了电机每接收一个脉冲时所转过的实际角度。值得注意的是,电子川Σ-V系列伺服驱动器的默认分辨率为17位(131072脉冲/转),这意味着即使不改变机械结构,仅通过调整电子参数就能实现运动特性的变化。
二、速度与电子齿轮比的非线性关系
从运动学公式v=ω×r来看,线速度确实与角速度成正比。但电子齿轮比的调整存在多重限制:首先,所有伺服电机都有额定转速限制,如松下的MINAS A6系列伺服电机最高转速为3000rpm,超过这个值就会触发过速保护。其次,当电子齿轮比设置过大时,虽然理论上单个脉冲对应的位移量增大,但系统可能因脉冲频率限制(通常PLC最高输出频率为500kHz)而无法达到预期速度。某汽车焊装线的实际案例显示,当电子齿轮比从11后,理论速度应提升4倍,但由于控制器输出频率限制,实际速度仅提升2.8倍。
三、系统匹配的黄金法则
优秀的运动控制系统设计需要遵循"三位一体"原则:
1. 机械传动比是基础:某数控机床制造商测试数据显示,当机械减速比为10:1时,电子齿轮比从1调整为5可使定位时间缩短40%,但继续增大到8反而因振动导致精度下降15%。
2. 控制器性能是关键:三菱FX5U PLC的脉冲输出频率最高可达200kHz,这意味着当电子齿轮比为10:1时,最大理论转速会受限于333rpm(假设编码器分辨率为131072)。
3. 负载特性是边界条件:注塑机合模机构测试表明,对于高惯性负载,电子齿轮比超过3:1会导致电机转矩波动增加30%,反而降低有效速度。
四、工程实践中的优化策略
在富士康的机器人装配线升级项目中,工程师们总结出电子齿轮比设置的"三步优化法":
1. 计算理论值:根据机械传动参数和编码器分辨率确定基础比值。
2. 动态调试:通过示波器观察指令脉冲与实际位置反馈的相位差,微调比值。
3. 极限测试:逐步提高比值直至出现跟随误差报警,然后回退20%作为安全余量。
该方案使SCARA机器人的循环时间从4.2秒缩短到3.5秒,同时将振动幅度控制在±0.01mm范围内。
五、现代伺服系统的发展趋势
随着总线式伺服(如EtherCAT)的普及,电子齿轮比的概念正在被"虚拟主轴"等更先进的控制方式替代。倍福的AX8000驱动器支持电子齿轮比实时动态调整功能,在包装生产线上实现了±1μs的同步精度。这种自适应控制策略比固定齿轮比方案提升效率达15-20%,代表着未来发展方向。
总之,电子齿轮比与速度的关系并非简单正比,而是存在最优解的非线性函数。合理的设置应该综合考虑机械特性、控制性能和负载工况,通常建议通过伺服调试软件的"频响分析"功能确定最佳比值。记住:在自动化领域,追求单一参数的极致往往适得其反,系统级的协调优化才是提升性能的关键。
-
工业自动化
+关注
关注
17文章
3223浏览量
70048 -
电子齿轮
+关注
关注
1文章
7浏览量
7554
发布评论请先 登录
行星齿轮减速机非标定制如何把控精度?

电子凸轮和电子齿轮的区别
航空燃油齿轮泵润滑与磨损机理分析及基于主动学习的全载荷轴承寿命分布预测

选购超级电容越大越好?别被忽悠了!
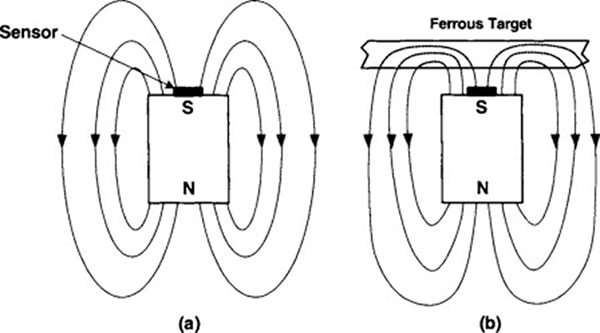
探索SSH - G01霍尔效应齿轮齿速与方向传感器:电子工程师的理想之选
MADDT1205A21驱动器有哪些参数设置?

在越野赛车中使用齿轮传感器
长行程直线传动的理想方案——飞创齿轮齿条模组案例分享
LED芯片越亮,发热量越大,还是芯片越暗,发热量越大?

奥松电子齿轮流量计的优势和应用
从开关速度看MOSFET在高频应用中的性能表现




评论