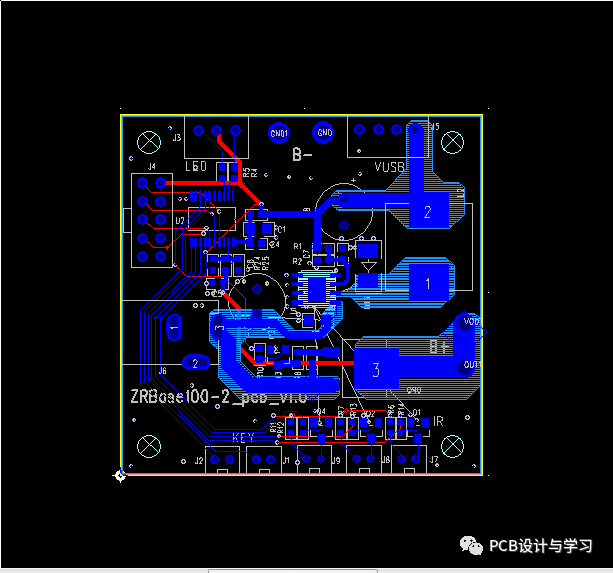
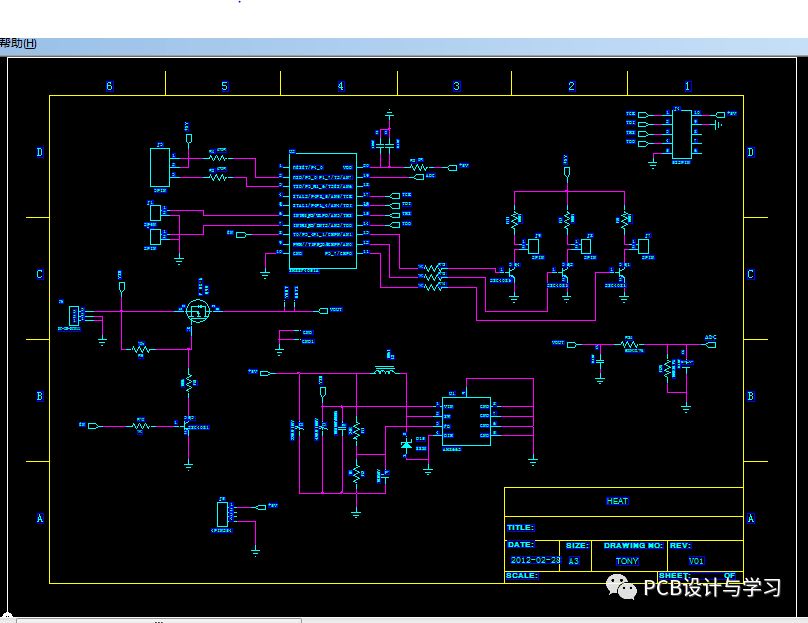
 机器人自主充电座PCB图和自主充电原理图
机器人自主充电座PCB图和自主充电原理图

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
pcb
+关注
关注
4417文章
23973浏览量
426269 -
机器人
+关注
关注
213文章
31481浏览量
223724 -
自主充电
+关注
关注
0文章
2浏览量
2709
原文标题:机器人自主充电座PCB和原理图
文章出处:【微信号:gh_eb821dd72e77,微信公众号:PCB和原理图设计与共享】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
深度解析|机器人自主移动的秘密(三)
作为最早出现在消费市场的服务机器人之一,它需要的路径规划算法更为复杂。一般来说,扫地机需要这么几个规划能力:贴边打扫、折返的工字形清扫以及没电时候自主充电。单单依靠前面介绍的D*这类算法,无法满足
发表于 08-01 13:50
机器人想要实现智能移动,必须具备超强的自主定位导航能力
预期; 自主寻路导航与运动控制带有多种导航和运动控制算法,轻松实现机器人虚拟墙、虚拟轨道、自主导航和障碍物规避等功能;采用特色的D*路径规划系统,实现边行走边建图;支持多传感器融合支持
发表于 01-03 11:41
服务机器人是如何实现自主定位导航的?
服务机器人想要自由行走,实现自主定位导航是关键,自主定位导航包括定位、建图与路径规划。SLAM作为机器人定位导航的核心技术,正不断获得行业内
发表于 10-10 16:29
嵌入式模拟智能为机器人提供了新的自主水平
`机器人不仅需要人工智能(AI)才能实现自主。他们还需要大量传感器,传感器融合以及边缘的实时推理。之前我们已经尝到了深度卷积神经网络的好处,如今来自激光雷达的更高数据处理的需求正在推动神经网络到
发表于 04-16 10:07
微信控制的家庭智能机器人(附语音聊天、人脸检测、自主巡航等)
,或者微信对机器人进行一个部署。并且会报警处理一些事情,例如降温功能,人脸检测报警等。当用户在家时,机器人可以为用户播放音乐、电影、语音识别聊天等,而且还会抓取网络新闻、发送微博、邮件、生成扫描二维码、文字提取等功能都已经可以实现。另外该
发表于 09-30 14:33
什么是服务机器人
问:什么是服务机器人?答:根据国际机器人联合会(InternationalFederationofRobotics,IRF)的定义,服务机器人是一种半自主或全
发表于 09-17 07:49
嵌入式模拟智能为机器人提供了新的自主水平
机器人不仅需要人工智能(AI)才能实现自主。他们还需要大量传感器,传感器融合以及边缘的实时推理。之前我们已经尝到了深度卷积神经网络的好处,如今来自激光雷达的更高数据处理的需求正在推动神经网络到新拓扑
发表于 12-20 06:16
DIY一个友好型自主机器人
描述ISLA 自主机器人ISLA 项目是一个 DIY 友好型自主机器人,主要使用通孔组件,使得这种设计对于任何有钱、Raspberry Pi Pico 和烙铁的人来说都非常容易实现。我决定做这个
发表于 07-13 06:18
毫米波技术如何为自主机器人提供边缘智能
本文讨论毫米波技术如何为自主机器人提供边缘智能,使传感器能够做出实时决策,以减缓或停止机器人,并确保其在工业机器人应用中的持续性能。 TI毫米波传感器可用于旨在帮助工业机器人避免碰撞的
发表于 11-09 08:08
什么是自主巡检机器人,它的作用是什么
自主巡检机器人主要通过自主充电、路径规划、自主导航定位、图像识别分析、环境感知等高新科技技术实现巡检任务的设备,无需人工干预,为企业提供设备
发表于 09-24 15:11
•3110次阅读




评论