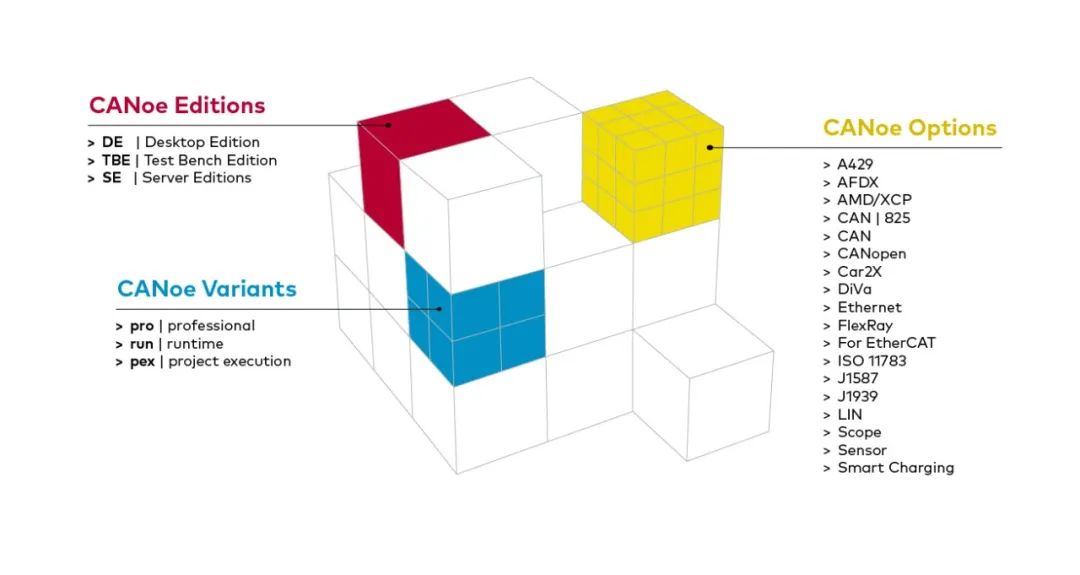
 CANoe产品体系19版本新特性及新增Option(上)
CANoe产品体系19版本新特性及新增Option(上)

新版本持续助力当前车辆E/E架构中ECU开发验证,同时赋能后续智能网联电动车型预研验证。新版本CANoe产品体系新增数据驱动的DDS、车辆互联服务和高效电机模型库,进一步支持CAN XL、10BASE-T1S和CAN FD Light赋能当下预研工作,全面综合增强全球充电系统的仿真和验证有效支撑新能源车出海,全新的V2X设备满足车联网测试验证,满足SOA架构下透传协议DLT、CMP和IEEE1722。更多编程与IDE实时代码补全、HIL/SIL、CI/CT与DevOps相关新功能详见:CANoe产品体系19新功能(下) - 基础功能与XIL测试。
01
CANoe新增DDS插件
基于vCDL配置数据类型、Topic和QoS,支持IDL转换为vCDL功能,支持使用VS Code插件开发DDS通信所需的数据库;
通信支持数据发布与订阅DDS Topic,支持放在Participant和Domain,支持OMG DDS标准定义的所有QoS设置;
支持所有复杂数据类型,包括结构体、联合、和嵌套数组等;
DDS监控分析扩展可用的Topic、Reader和Writer匹配关系、序列化失败等;
支持RPC扩展和Security,可直接集成ROS2环境,兼容RTI Connext、FastDDS、Cyclone DDS等;
无需转换可直接使用汽车以太网1000/100BASE-T1硬件,支持底层以太网报文在Trace和Protocol Monitor中可视化。

02
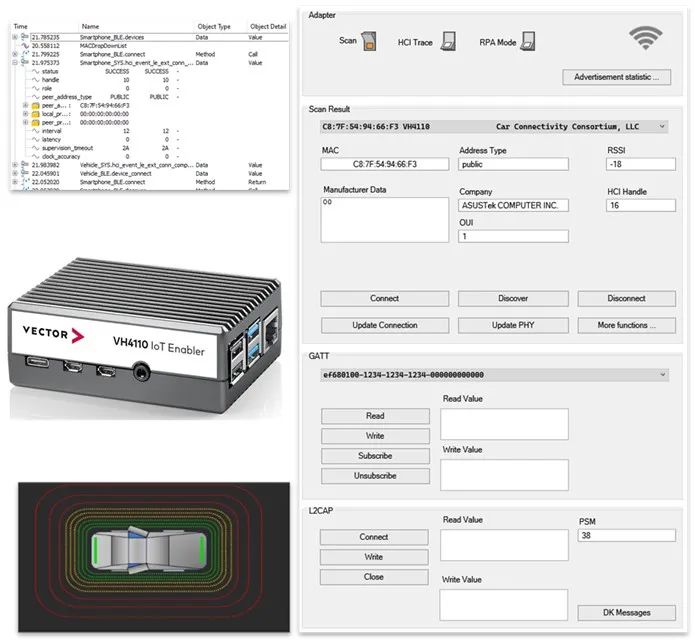
CANoe新增Connectivity插件
无需专业协议细节即可通过vCDL定义应用数据,通过CAPL、Python和C#实现互联服务配置;
支持MQTT(支持客户端和Broker模式,包括MQTT故障测试)、HTTP(客户端和服务器模式)、Modbus/TCP(支持客户端、服务器和网关模式)、gRPC(支持客户端模式和Unary请求通信);
VN系列Ethernet总线硬件接口卡可用于MQTT、HTTP和Modbus系统通信;
MQTT、HTTP和gRPC序列化支持JSON、Protocol Buffer或纯文本;
搭配IoT设备支持WiFi(支持接入点和站点模式)、蓝牙/低功耗蓝牙(支持中心和外设模式、配对、HCI跟踪和注入)、NFC(支持ISO 7816 APDU规范的读卡器和卡/标签模式)和UWB(支持通用控制接口UCI中的启动者和响应者模式)。

03
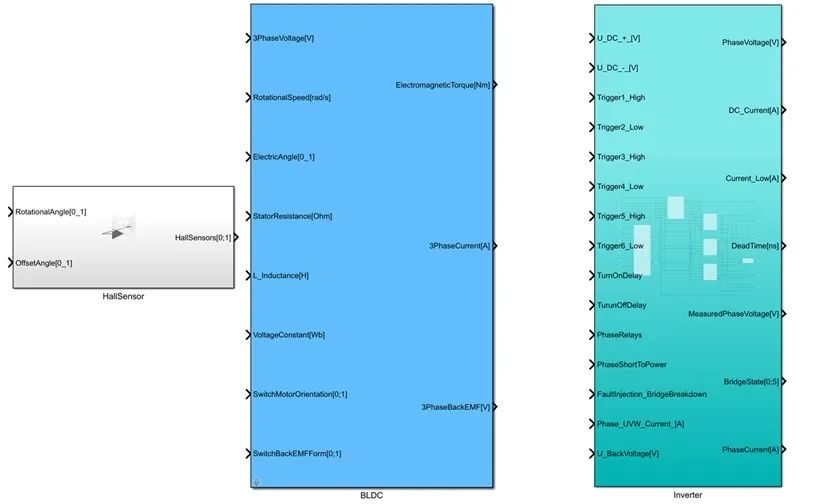
CANoe新增电机模型插件
Model Option Electric Motor提供“Ready-to-Use”的永磁同步电机(PMSM)和无刷直流电机(BLDC)模型,模型仅需通过CANoe FPGA Manager即可直接刷写到电机板卡VT5838上,直接满足电机HIL;
可通过电机模板提供的参数,直接通过系统变量修改电机参数,而无需额外工具。
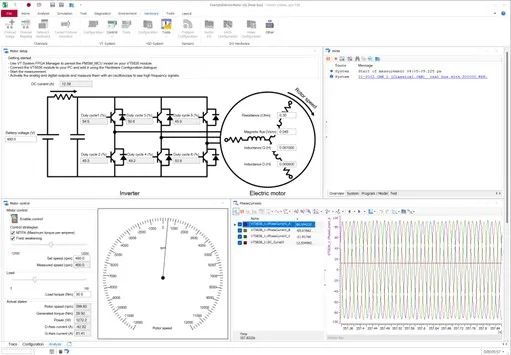
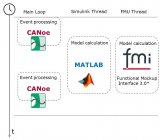
同时提供高度开放的Simulink模型库,耦合MATLAB/Simulink和FPGA工具链,实现项目所需,更好满足电驱、TCU和线控转向等HIL测试。
04
以太网新增功能与升级
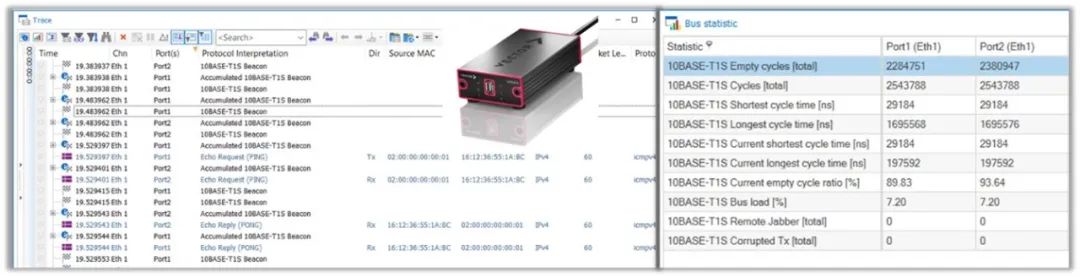
全新的10BASE-T1S总线统计功能,支持总线负载率、空闲Cycle和最大/最小周期等统计信息,Trace窗口新增Beacon可视化选项,面向10BASE-T1S通信提供2通道紧凑型通信接口卡VN5614;
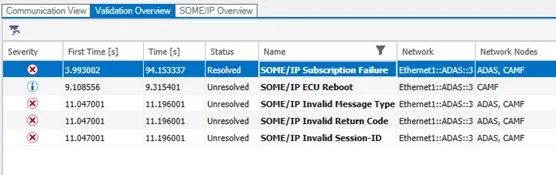
扩展SOME/IP功能:新增用于等待SOME/IP服务发现和报文的CAPL测试函数,新增用于处理SOME/IP和SOME/IP SD的CAPL回调,支持最大4MB的SOME/IP报文分析,SOME/IP交互层API支持为同一服务实例模拟多个消费服务实例;
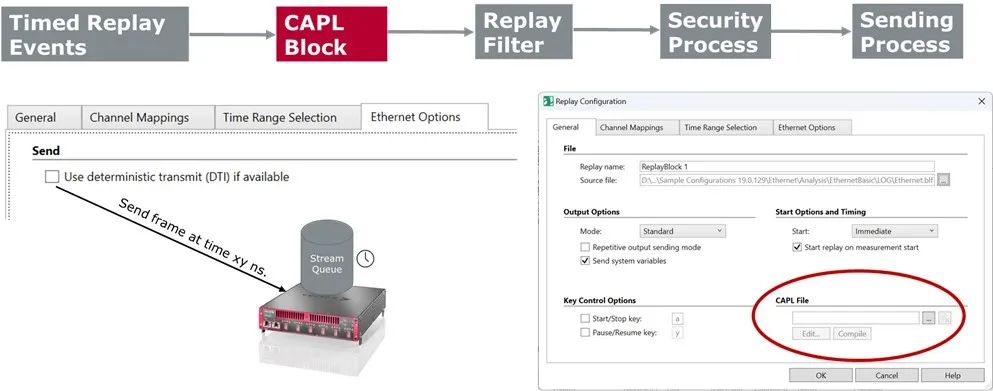
完善并优化Ethernet在线回放功能,用于回放期间操作回放报文中的数据,如创建过滤或数据更新频率等,可以与确定性传输接口结合使用来满足激光雷达回放;
协议监控器Protocol Monitor更快速分析Ethernet:与其它分析窗口可同步时间戳分析,支持更多分类过滤分析功能,SOME/IP动态运行过程中的深层次失效原因说明;
区域控制器下AVB/TSN增强:AVB IL函数和控制格式支持发送方和接收方的AVTP,并支持CAN、LIN和FlexRay报文封装,改进AVB API错误处理机制以更好提示错误、无效音频通道检测以及更详细的回调说明;
DoIP优化内容:诊断配置缺失或配置错误适配器时的优化,支持诊断使用下级ECU地址进行非请求的诊断响应配置,支持ISO 13400-2:2019/Amd1中Payload类型0x8004和0x9001的内置诊断通道以及API接口。
05
更全面支持CAN技术 - CAN FD Light和CAN XL
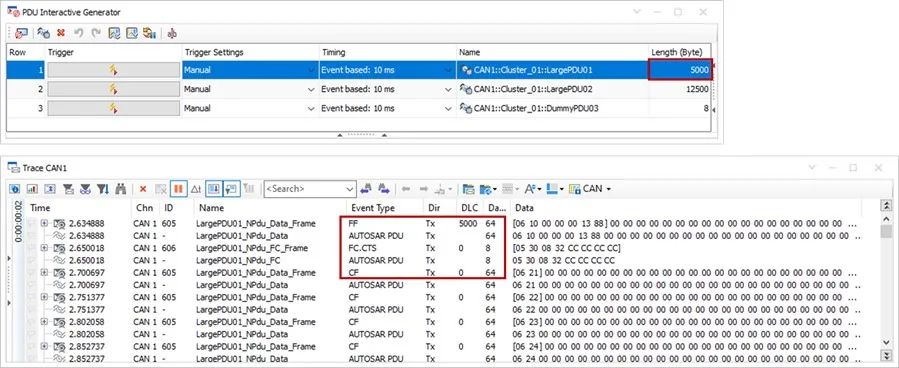
CAN XL数据记录支持*.blf格式;
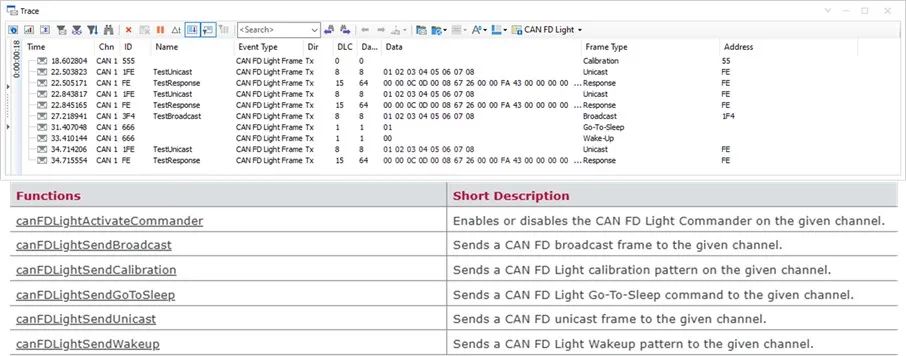
支持最新版本ISO11898规范定义的轻量级CAN FD Light协议,满足传感器和执行器通过请求与响应的方式进行CAN FD Light通信系统的仿真与分析,并提供相关CAPL API;
NET 8编程支持CAN报文和访问AUTOSAR 4.2数据库中的原始报文。
06
智能CCS/NACS协议分析器,更多充电功能支持“加电”与“出海”
充电插件新增支持OppCharge、SAE J3105、VDA261 Ed1和GB/T 27930-2023(A类系统)等协议;
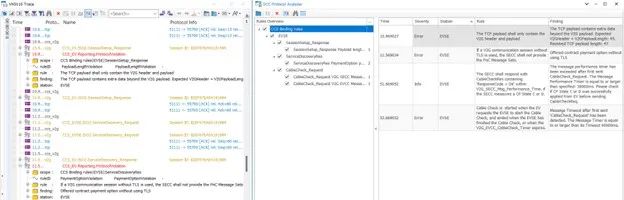
Security Manager接通Hubject证书平台到CANoe中,更好满足ISO 15118中PnC互操作性和安全测试;
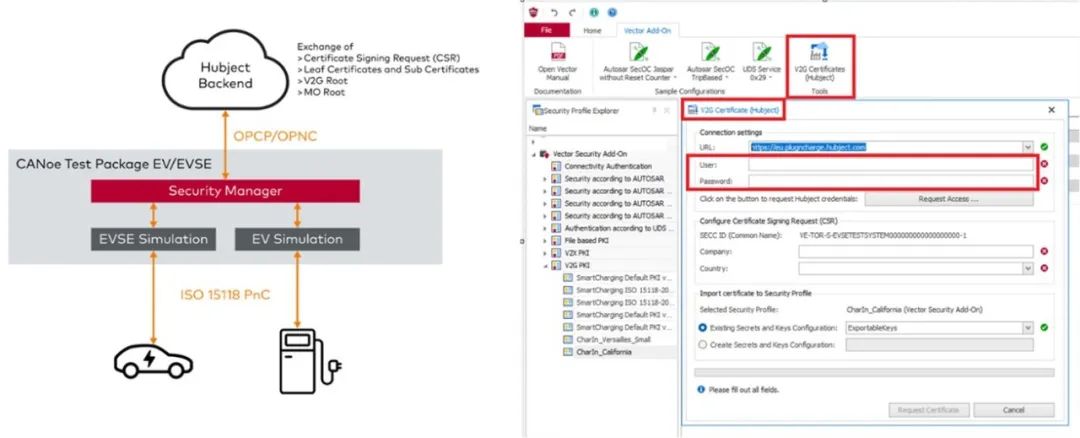
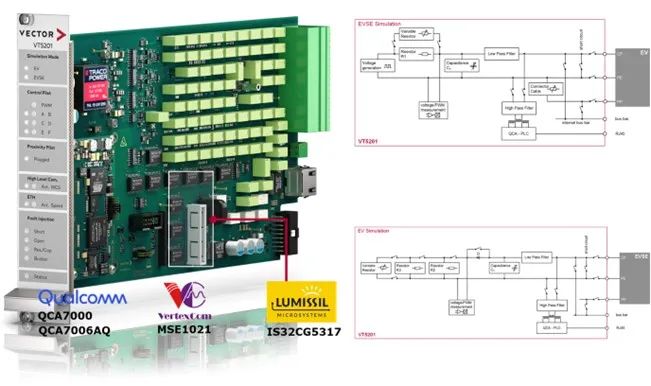
支持欧美标充电测试新板卡VT5201发布,提供可选的不同Green PHY PLC芯片以满足互操作测试,搭配全新的充电协议一致性测试Package确保充电系统质量。
07
Sensor、AMD/XCP、CANopen、EtherCAT和Car2X功能新增与改善
SENT搭配VT2710支持配置13个Nibble;
运行版本CANoe支持XCP设备的创建与删除,并支持改变配置参数表,YAML导出时支持结构体参数,改善XCP on TCP连接,CANoe的AUTOSAR DLT插件扩展支持Verbose Mode;
CANopen在数据库生成时通信参数对象用作PDO,以便Trace分析窗口显示具体描述信息,网络管理服务LSS支持模拟未配置节点ID;
EtherCAT支持在所有NDIS驱动的网卡上运行Master设备和Slave设备;
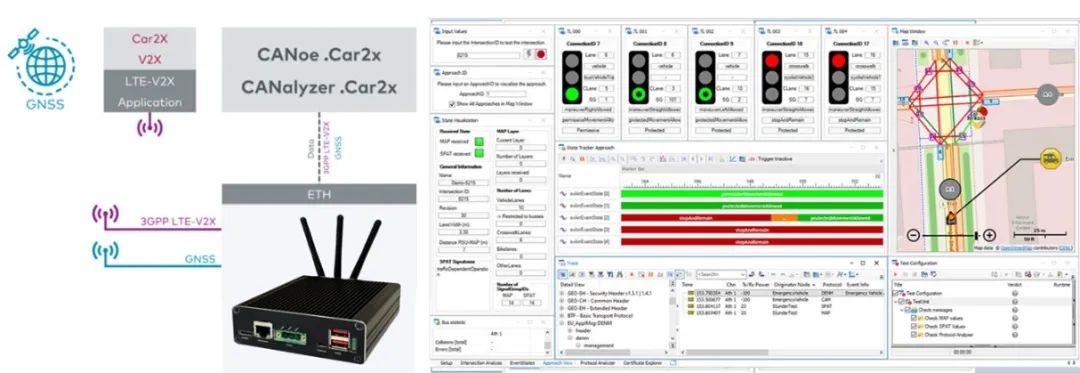
提供满足3GPP LTE-V2X PC5直连硬件用于V2X开发测试和场地测试,Car2X协议分析仪增加额外检测项。Security Manager增强与V2X PKI服务器后台通信的注册证书,ECT L0、L1和L2可用于签名和SSP位校验。场景测试增强独立运行多个场景功能,V2X事件和属性可根据距离或时间定义。携手生态伙伴提供欧盟V2X合规性测试,在确保详细验证时通过Car2X Protocol Analyzer提供验证失败的根本原因分析。
08
J1939和ISO 11783更好支持商用车和农业机械
J1939全新的通信统计窗口,增强功能安全E2E自动计算。全新的GNSS交互层,支持便捷的CAPL接口轻松实现轨迹描绘(如直线、圆弧和曲线等),生成轨迹在物理上是正确的并显示方向、速度和偏航率的连续变化,通过Map窗口可使用鼠标交互定义新轨迹且支持可视化,并可计算因未安装在车辆中心点导致偏移的GNSS接收到的轨迹信息。全新的ISO 11783模板支持拖拉机装备管理TIM的便捷分析,新增任务控制TC窗口便捷的过滤与分析功能,支持TIM中挂钩和顶杆连接的所有功能。
-
IDE
+关注
关注
0文章
368浏览量
49232 -
ecu
+关注
关注
14文章
995浏览量
57518 -
CANoe
+关注
关注
4文章
88浏览量
9927
发布评论请先 登录
用S32K310进行Canoe自带LIN一致性测试时,遇到的两个问题求解
蓝牙核心规范6.2版本新增的功能特性

索尼更新相机遥控软件开发包2.01版本
西门子PCB DFM分析工具Valor NPI 2510版本的新增功能
AMD Vivado Design Suite 2025.2版本现已发布
IvorySQL开源社区正式发布IvorySQL 5.0版本

CANoe.Diva典型使用问题五则

Quartus Prime Pro 25.1版本的安装和使用

AMD Vivado设计套件2025.1版本的功能特性

github 上的 nano版本已经更新到了4.1.1,是否能提供4.1.1版本的mdk pack包?
CANoe中ADAS功能集介绍

【文章转载】CANoe产品体系19版本新功能(下) - 基础功能与XIL测试
CANoe产品体系19版本新功能(下)




评论