 中国科学院:超低噪声准二维隧穿传感器应用于精细触觉识别研究取得进展
中国科学院:超低噪声准二维隧穿传感器应用于精细触觉识别研究取得进展

智能机器人执行超精细操作任务时,如何在复杂环境中通过触觉辨别细微压力(如流体环境)是一项亟待解决的技术瓶颈。尽管高灵敏度柔性触觉传感器已有大量研究报告,但由于柔性传感器易受到本征噪声的限制,在实际应用中的压力分辨率水平仍难以满足需求。
近日,中国科学院重庆绿色智能技术研究院研究团队受人体指尖默克尔细胞启发,提出一种共形石墨烯纳米墙-六方氮化硼-石墨烯(CGNWs-hBN-Gr)准二维垂直隧穿触觉传感器,利用hBN隧穿通道模拟PZ蛋白的生物机械门控离子通道,通过微纳米多尺度力敏界面实现了原子层间隧穿电流的宏观调控。
此外,hBN盖层和隧穿效应可有效抑制陷阱电荷,从而降低器件1/f噪声。实验数据显示,该传感器灵敏度高达1.99×106kPa-1,在10 Hz频率下的噪声功率谱密度仅为2.2×10-24A2/Hz,噪声等效压力(NEPr)低至7.96×10-3Pa,信噪比高达68.76 dB。研究团队建立了机器人指尖液体识别系统,通过对比COMSOL仿真与实际测试数据,捕捉到液体接触过程中的微动态特征,配合过渡感知上下文注意力网络(TacAtNet)模型,实现不同溶液甚至同一溶液的不同浓度的识别,在不同浓度的酒精(0%、25%、50%、75% 和 99%)中识别率高达98.1%。
该项技术增强了机器人在复杂环境中的感知能力,为下一代机器人的先进应用提供了保障。
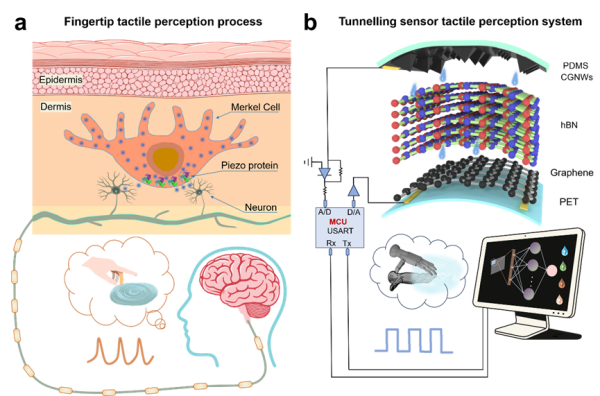
仿生触觉传感结构和感知过程
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2578文章
55862浏览量
795621
发布评论请先 登录
相关推荐
热点推荐
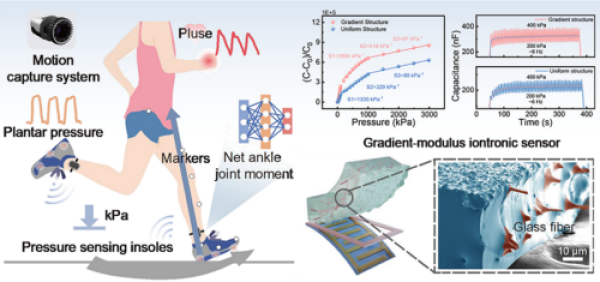
北京理工大学与中国科学院:研究自适应模量压力传感器阵列,赋能无线触觉可视化
。然而,因各层材料模量存在差异,传感器多层结构间产生的力学失配问题,始终是研发具备可靠界面稳定性的高性能触觉 / 压力传感器的一大挑战。 北京理工大学沈国震教授 、化麒麟教授 与中国科学院

中国科学院长春光机所首次亮相SEMICON China 2026
2026年3月25日,SEMICON China 2026(上海国际半导体展)在上海新国际博览中心隆重举行,会期三天。中国科学院长春光机所首次亮相该展会,另有2家长光企业以独立参展的形式参加本次展会。中国科学院长春光机所副所长李耀彬,副所长、党委副书记孙守红以及科研、管理
中国科学院西安光机所自研原位传感器 解锁深海移动观测新方式
近日,中国科学院西安光学精密机械研究所(西安光机所)吴国俊研究员团队牵头研制的多型国产海洋生物地球化学原位传感器,成功完成多平台、多场景深海应用验证,标志着我国在该领域实现从“跟跑”到
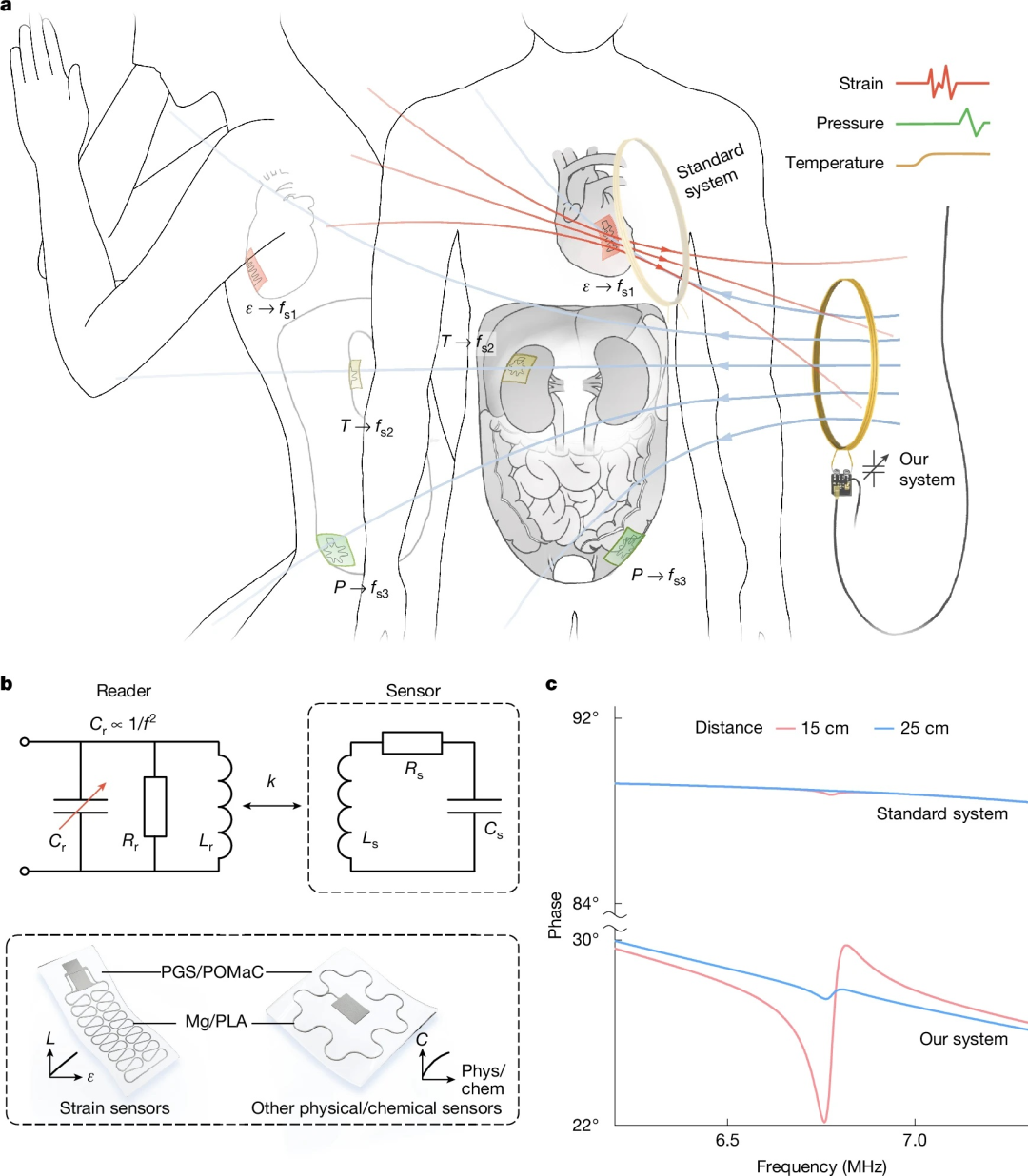
中国科学院与清华大学:在无线传感医疗植入物研究方面取得重要进展
2026 年 1 月 7 日,中国科学院力学所苏业旺研究员团队与清华大学生物力学所李爽博士和香港城市大学于欣格教授合作提出了一种柔性、可降解的无线传感平台,该平台可在远距离(例如 16 cm)下
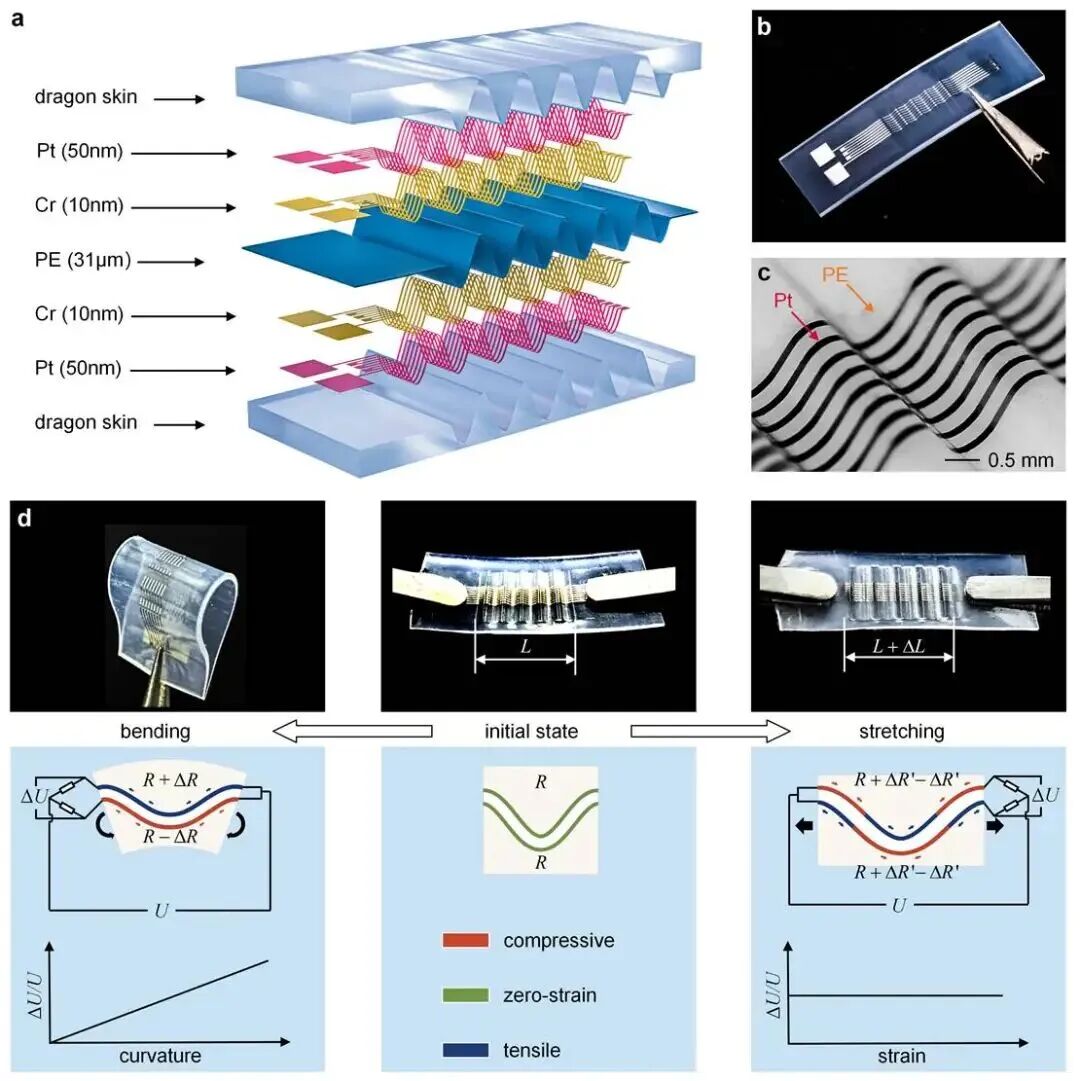
中国科学院:在可拉伸曲率传感器方面取得进展
动作识别与控制的重要基础。然而,现有曲率传感策略主要依赖可拉伸应变传感器或非拉伸型曲率传感器,前者在实际穿戴过程中易受摩擦与滑移干扰而产生不可校准误差,后者则因缺乏拉伸能力而难以满足柔
中国科学院自动化研究所一行莅临智行者考察调研
近日,中国科学院自动化研究所专家团队一行莅临智行者,考察无人驾驶技术及商业化应用方面的创新突破与市场实践。作为领先的“特种无人驾驶解决方案提供商”,智行者向专家团系统展示了智行者如何凭借深厚技术积累与场景理解,在多领域实现规模化商业落地。
上海光机所在飞秒激光可控操控二维纳米片运动方面取得进展
产生的光声信号。(d)飞秒激光精准操控纳米片在轨道内的运动。 近期,中国科学院上海光学精密机械研究所光电前沿交叉部王俊研究员团队在利用飞秒激光可控操控范德华界面上二维纳米片的运动方面

中国科学院金属研究所:柔性单通道多功能热电半导体传感器件研究取得重要新进展
近年来,微型化、柔性化、智能化等多功能集成电子器件在人工智能、生物医疗、集成电路等领域取得了显著的发展。其中,能够同时感知触觉和温度的柔性应力/应变-温度传感器,因其在电子皮肤、柔性传感器

中国科学院:高线性类皮肤柔性传感器研究取得系列进展
线性度是柔性传感技术的核心测量能力,线性不足不仅增加了系统标定与数据解耦的复杂度,更直接影响到信号的物理可比性与测量可追溯性。 中国科学院重庆绿色智能技术研究院提出基于皮肤启发的双机制离电传感
润和软件与中国科学院广州生物医药与健康研究院达成战略合作
近日,江苏润和软件股份有限公司(以下简称“润和软件”)与中国科学院广州生物医药与健康研究院正式签署战略合作协议。双方强强联合,将聚焦人类细胞谱系大科学研究设施场景,在国产操作系统、智能物联、大数

中国科学院院士王曦,递补为中央委员
、韦韬、邓亦武、邓修明、卢红为中央委员会委员。 公开资料显示,王曦,男,汉族,1966年8月生,江苏南通人,2001年4月加入中国共产党,1990年6月参加工作,中国科学院上海冶金研究所材料物理专业毕业,

中国科学院沈阳自动化研究所:研究基于石墨烯/PDMS封装的医用胶带柔性传感器,用于水下机器人运动检测
水下应用的需求仍是一项重大挑战。本文,中国科学院沈阳自动化研究所郭洪吉等研究人员在《ADVANCED MATERIALS TECHNOLOGIES》期刊发表名为“A Nanocrack-Based

恭贺 | 晟鹏创始人成会明院士当选欧洲科学院院士!
近日,欧洲科学院(AcademiaEuropaea)陆续公布2025年院士入选名单,经同行推荐、评审,中国科学院深圳先进技术研究院碳中和技术研究所所长、广东晟鹏材料技术有限公司(广东晟

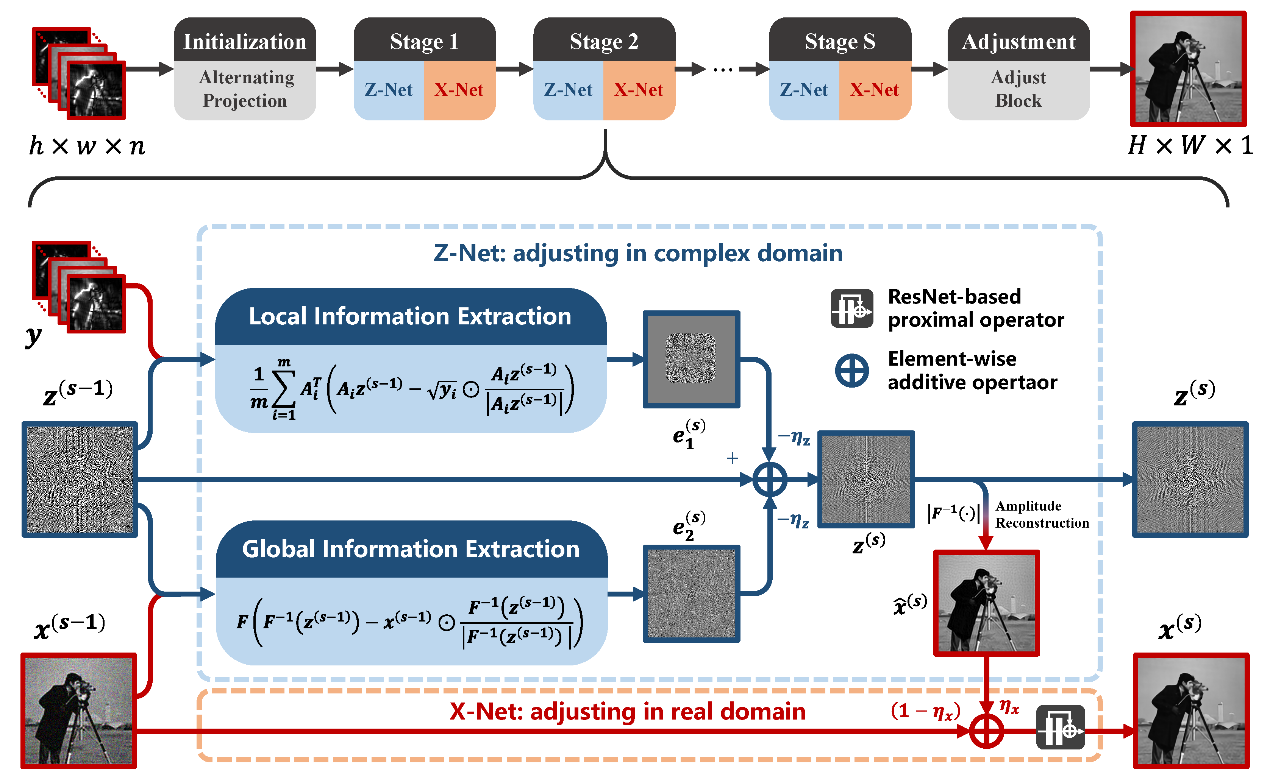
中国科学院西安光机所在计算成像可解释性深度学习重建方法取得进展
图1 MDFP-Net网络结构 近日,中国科学院西安光机所空间光学技术研究室在计算成像可解释性深度学习重建方法研究取得创新性进展。相关
澎峰科技亮相第六届中国科学院大学校友创新论坛
近日,第六届中国科学院大学校友创新论坛在北京成功举行。澎峰科技作为国内领先的算力基础软件与解决方案提供商,荣获本届论坛“未来之星校友企业奖”殊荣。公司创始人兼CEO张先轶博士受邀出席本次活动并领奖。




评论