 第十五届松山湖中国IC创新高峰论坛圆满落幕
第十五届松山湖中国IC创新高峰论坛圆满落幕

近日,第十五届松山湖中国IC创新高峰论坛(以下简称“松山湖论坛”) 在东莞市松山湖凯悦酒店顺利召开。本届论坛由中国半导体行业协会集成电路设计分会和芯原股份联合主办,以“面向‘具身智慧机器人’的创新IC新品推介”为主题,发布了10款代表中国IC先进设计水平,与具身智慧机器人需求密切结合的本土IC新品。
松山湖论坛致力于打造国内最具影响力的中国IC新品集中发布平台,推动芯片设计企业与系统厂商和投资机构的对接。本次论坛邀请了130多位来自IC企业、软件及系统公司、投资机构、政府、协会及研究机构的决策者和专业媒体出席,同时超过18,000人观看了线上直播。论坛当天的媒体原创报道数超过80篇。
中国半导体行业协会集成电路设计分会副理事长,芯原股份创始人、董事长兼总裁戴伟民博士首先回顾了2024年推介的十款芯片产品的市场表现情况,他表示,松山湖论坛已经连续举办15届,每年推介约10款国产芯片。过去的14年,松山湖论坛共推介了86家本土IC企业的118款国产IC产品,推介产品的总量产率达到了94%。这些企业在参加松山湖论坛之后上市的比率达到19.8%,还有4家正在上市进程中。未来,松山湖论坛将继续为集成电路产业搭建高效的资源对接平台,帮助优秀的国产IC发展壮大。
中国半导体行业协会集成电路设计分会理事长魏少军,东莞市人民政府顾问、东莞市生物技术产业发展有限公司董事长宋涛,松山湖党工委委员、管委会总工程师冯瑜平分别为本届论坛开幕致辞,高度肯定了松山湖论坛在促进产业交流与技术创新方面的积极作用,并表达了对论坛的支持与期待。
在产品推介环节,来自芯驰科技、爱芯元智、万有引力等十家本土IC企业的嘉宾分别进行了精彩宣讲,现场推介了十款面向“具身智慧机器人”的创新IC新品。
01D9-Max:面向具身智能应用的高性能边缘AI SoC
北京芯驰半导体科技股份有限公司CTO孙鸣乐
D9-Max是一款符合车规标准,面向具身智能应用的高性能、高可靠性SoC。其采用多核异构计算架构,集成了高性能CPU、GPU、NPU、DSP、ISP、视频处理单元,并内置MCU,具备丰富的通信接口。D9-Max可支持运动控制、路径规划、感知、语音交互、传感器数据处理、数据采集、人机交互等功能,可满足具身智能在复杂场景下的多样化需求。
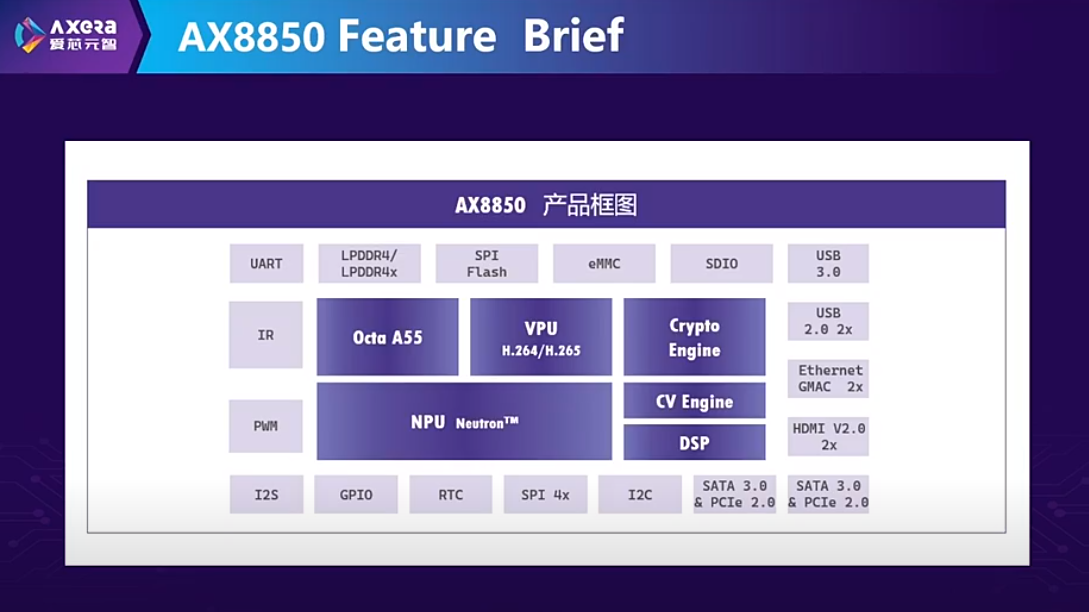
02AX8850:以边缘算力,让具身智能触手可及
爱芯元智半导体股份有限公司联合创始人、副总裁刘建伟
AX8850是一款具备高算力和高能效比的数字芯片,集成了八核Arm Cortex-A55 CPU,24TOPS@INT8高算力的NPU,支持H.264/265编解码、64位LPDDR4x、eMMC v5.1/ SPI Flash,提供2路Ethernet、1路USB 3.0、2路USB 2.0及2路HDMI输出等丰富接口,能够广泛应用于消费电子产品的智能化升级,充分释放边缘计算的性能潜力。
03EB100:面向机器人/XR应用的低功耗空间渲染和显示专用芯片
万有引力 (宁波) 电子科技有限公司市场营销总监张武龙
EB100是万有引力自研的12nm低功耗空间渲染和显示专用芯片,支持3D模型实时重建与驱动、多视角平行渲染、光场显示图像处理与增强,以及多图层空间混叠的核心功能。该芯片能够在三维空间中以逼真、生动的方式呈现实时互动的面容,可广泛应用于具身智能、AI助手、陪伴机器人和远程替身等场景,显著提升设备的亲和力与沉浸感。
04VS859:面向具身智能的高性能“感算控”一体化芯片
上海为旌科技有限公司市场总监黄智
VS859是一款面向高端视觉计算与应用场景的SoC,具备高度集成、多模态接入、高性能计算和低时延等特性,能够满足未来边端侧大模型部署的需求,广泛适用于智慧城市、智能机器人等多种应用场景。
05HPM6E8Y:先楫实时控制芯片驱动的机器人关节“芯”时代
上海先楫半导体科技有限公司嵌入式专家及产品总监费振东
HPM6E8Y系列MCU内置RISC-V双核处理器,集成2个以太网PHY收发器,支持EtherCAT从控制器和多达3个外部端口的时间敏感网络千兆以太网交换机。同时,其还拥有32通道高分辨率PWM输出和∑-∆数字滤波器。这款芯片专为机器人关节的高精度运动控制设计,具备高性能、高集成、小封装及简便易用等优势。
06G32R501:面向具身机器人的高性能、高安全实时控制MCU/DSP
珠海极海半导体有限公司实时控制MCU/DSP产品线高级产品经理卢鹏升
G32R501是全球首款基于双核Arm Cortex-M52的高端实时控制MCU,采用Arm v8.1-M架构,支持Arm HeliumTM矢量扩展,并内置极海自研的紫电数学指令扩展单元,能够大幅提升算法执行效率,降低CPU访问时延。该芯片基于40nm eFlash工艺,集成了高性能感知模块、丰富控制外设和灵活互联系统,广泛适用于新能源光伏、工业自动化、商业电源、新能源汽车等中高端应用。
07M7000:机器人关节的高性能实时处理器到控制算法的生态闭环
广东匠芯创科技有限公司市场总监徐勇
M7000系列是六款专为工业控制、光伏能源与数字电源等行业应用设计的高性能DSP实时处理器,基于国产自主高算力的RISC-V内核,主频高达552MHz,具备强大的处理性能与高效的运行能力。该系列还提供大容量内存及丰富的外设接口,能够应对各类实时数据处理与控制需求,适用于多种工业应用场景,广泛覆盖泛工业等关键领域。
08SC533HGS:赋能高端机器视觉的高性能全局快门图像传感器
思特威 (上海) 电子科技股份有限公司高级销售总监宗翔
SC533HGS基于思特威SmartGS-2 Plus技术平台,具备高感度、高动态范围、高帧率等多重性能优势,其出色的成像效果可满足多类型智能机器人在避障识别与3D定位感知等场景中的需求,助力实现更精准的环境交互。
09KTM5900:高精度智能磁性传感器芯片赋能机器人与自动化
泉州昆泰芯微电子科技有限公司CEO武建峰
KTM59系列是一款基于隧道磁阻效应 (TMR) 的高速高精度磁性编码器芯片,专为工业自动化和精密控制设计,具备高灵敏度和稳定性。其支持单对极磁铁实现超高分辨率角度测量,具备超高精度、高速响应和自适应校准能力。
10TS-PON Gen2:面向人形机器人的通感控一体全光网芯片
鹏瞰集成电路 (杭州) 有限公司首席市场营销官江晓峰
TS-PON Gen2是一款面向人形机器人内部网络的全光网芯片,融合感知、通信与控制于一体,全面满足高带宽视觉传输、低时延伺服控制以及全网时钟同步等关键需求,有效简化机器人内部复杂的线速架构,提升系统集成度、可靠性和灵活性。
在压轴的圆桌论坛环节,戴博士与乐聚(深圳)机器人技术有限公司算法总监何治成,上海昱感微电子科技有限公司CEO蒋宏,演讲嘉宾江晓峰、刘建伟,以及乌镇智库理事长张晓东围绕“具身智慧机器人的产业化之路”,共同探讨了具身智慧机器人的发展路径及难点、落地过程中的关键障碍与突破方向、机器人关节芯片的设计挑战,以及人形机器人落地的应用场景等话题。台下的嘉宾也踊跃参与投票,表达了自己的观点,与台上嘉宾进行了实时互动。
以下为圆桌论坛部分嘉宾观点及
现场投票结果
问题一:“具身+智慧”是机器人公司让机器人设备变得智能化;“智慧+具身”是AI公司把大模型具身化,例如OpenAI和Google自己做机器人或投资机器人公司的方式。如何看待这两种方式的产业化路径?
部分嘉宾观点:
张晓东:当前存在两种路径,一是以“具身+智慧”为导向,如马斯克所倡导,优先追求通用场景,目标是通过降低使用门槛实现广泛应用;二是“智慧+具身”,代表传统工业机器人路线,或是在大语言模型发展驱动下,尝试将其植入机器人系统。从技术演进经验来看,专用场景更可能率先落地,但通用方案在大模型推动下展现出长期潜力,值得持续观察。
刘建伟:从数据的可获得性和经济性来看,通用路线更具优势。人形机器人的物理数据采集成本可分摊,且其所依赖的通用算力与硬件具备规模化效应,与人工智能的发展路径类似。
投票:下述哪种发展路径,更容易实现商业化落地?(单选)
65%以上的现场嘉宾认为机器人企业+智慧,面向场景应用更容易实现商业化落地
问题二:当前具身智慧机器人落地过程中的关键障碍是“大脑”的能力不足,还是“小脑”的能力不足,还是机器人本体不够好?应该从哪个环节开始突破,为什么?
部分嘉宾观点:
何治成:当前业界对“大脑智能”(如大模型、规划算法) 关注较多,但真正制约具身智能机器人落地的,是“小脑能力”的缺位——也就是复杂运动的实时控制、协调与执行。人形机器人本体结构复杂,动作控制缺乏统一标准,导致算法迁移难、泛化差;与此同时,产业链上下游尚未建立稳定协同机制,制约了场景落地与成本优化。
投票:您认为具身智慧机器人产业化最大的难点是?(选三项)
现场嘉宾投票选出的前三项分别为:跨场景/任务泛化迁移难、可泛化高精准操作技能学习难、缺乏真实刚需场景验证
问题三:目前,新能源车企积极布局机器人产业,并最大程度复用智驾芯片、传感器、动力系统,以及工厂等资源。从边缘AI芯片供应商角度来看,智慧汽车和具身智慧机器人对AI芯片有哪些差异化需求?面向具身智慧机器人应用的AI芯片应该主要关注哪些性能指标?
部分嘉宾观点:
刘建伟:车与机器人在技术上一脉相承,均依赖算力的支撑,但机器人更强调通用算力和数据驱动。差异化需求在于机器人需适应多样化的应用场景,特别强调算力的性价比、能效比和实时性 (如快速决策与控制能力),同时需要支持多模态融合 (如视觉、触觉等) 的处理能力。
投票:支持具身智慧机器人的AI芯片应优先优化哪类指标?(选三项)
现场嘉宾投票选出的前三项分别为:实时处理能力 (低延迟)、传感器接入与边缘推理能力、模型兼容性与迁移性
问题四:高精度感知是否一定要求高成本传感器?针对“感知-推理-行为”协同优化的方案,目前成熟度如何?存在哪些发展困境,如何突破?
部分嘉宾观点:
蒋宏:高精度感知未必依赖高成本传感器,例如激光雷达已降至几百元,多传感器融合已进入发展风口。当前的技术挑战在于突破“模态墙”(统一语义空间)、“符号墙”(神经网络转符号知识) 和“因果墙”(统计转因果推理)。感知层技术正快速推进 (如多模态融合),但推理与因果理解仍需突破。结合大语言模型与深度学习,将有助于提升物理因果推理能力。
投票:具身智慧机器人的传感系统优化,应优先考虑哪类方向?(单选)
近七成的现场嘉宾投票选择多模态融合 (视觉+惯性导航系统+力觉)
问题五:用于机器人关节的芯片有哪些设计挑战?
部分嘉宾观点:
费振东:关节的设计需要小型化、轻量化,且对芯片集成度、低功耗和实时控制能力有较高要求。不同厂商的技术路线多样,通信协议复杂 (如以太网、工业自动化协议),并且需要支持异构网络与多传感器融合。同时,产业标准化不足,需产业链各方协作优化控制算法与硬件协同设计。
问题六:具身智慧机器人需要底层的基础设施——网络的支持,近几年光纤上车也在验证和布局中。针对机器人应用的网络通信系统和芯片有什么痛点和特殊需求?从芯片的角度,应该重点关注哪些指标?
部分嘉宾观点:
江晓峰:机器人应用的痛点主要集中在数据的高实时性和低延时传输 (例如动作控制指令),需要避免信号干扰并减轻线束重量。在此基础上,特殊需求还包括确定性网络 (确保关键数据优先传输)、高可靠性 (特别是在工业场景的应用),以及轻量化 (通过光纤替代铜线)。因此,芯片设计应重点关注低延时、高带宽、抗干扰能力,并具备支持异构网络的兼容性。
投票:针对具身智慧机器人的网络通信系统和芯片,哪些指标更为重要?(选三项)
现场嘉宾投票选出的前三项分别为:实时传输能力 (低延迟和确定性)、线束的简化和统一、高带宽图像传输能力
问题七:未来3年内,人形机器人最先落地的应用场景是什么?
部分嘉宾观点:
张晓东:农业采摘 (场景成熟,无安全压力)、高危环境作业 (如核电厂巡检)、长者陪护 (老龄化刚需)。
何治成:工业场景搬运 (通用性强,适合替代枯燥劳动)、长者陪护、高危环境作业 (安全需求迫切)。
刘建伟:高危环境作业 (解放人力)、农业采摘 (类制造业场景)、家庭清洁和餐饮加工 (枯燥体力劳动)。
蒋宏:仓储与物流搬运 (AGV技术成熟)、高危环境作业、长者陪护 (情感与数据监测价值)。
费振东:仓储与物流搬运、工业流水线协作、安防与巡检 (商业化落地快,成本可控)。
江晓峰:安防与巡检 (技术可行)、工业流水线协作 (柔性化需求)、零售服务 (场景适配性强)。
投票:未来3年内,人形机器人最先落地的应用场景是什么?(选三项)
现场嘉宾投票选出的前三项分别为:仓储与物流搬运、高危环境作业、安防与巡检
此外,多家企业在论坛现场设置了展台,展示了他们在具身智慧机器人领域的相关技术成果。
-
集成电路
+关注
关注
5446文章
12468浏览量
372687 -
机器人
+关注
关注
213文章
30581浏览量
219592 -
IC
+关注
关注
36文章
6263浏览量
184248 -
芯原
+关注
关注
0文章
127浏览量
11794
原文标题:第十五届松山湖中国IC创新高峰论坛圆满落幕
文章出处:【微信号:VeriSilicon,微信公众号:芯原VeriSilicon】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
雷曼光电硬核科技助力第十五届全国运动会

国产“HPM芯”赋能机器人关节,先楫半导体亮相松山湖IC创新论坛

三款高性能芯片亮相,面向具身智慧机器人应用
爱芯元智AX8850:以边缘算力,让具身智能触手可及

思特威SC533HGS:赋能高端机器视觉的高性能全局快门图像传感器

第十五届松山湖中国IC创新高峰论坛 “具身智能”国产芯片集体亮相

迅镭激光亮相第十五届钢结构行业发展论坛
洲明科技显示技术助力第十五届全运会场馆焕新
龙腾半导体第十五届亚洲电源技术发展论坛精彩回顾
深度参与,共话未来 —— 吹田电气亮相第十五届亚洲电源技术发展论坛





 工商网监
工商网监
评论