 工业智能网关接入埃斯顿机器人实现远程监控与在线管理
工业智能网关接入埃斯顿机器人实现远程监控与在线管理

在当今制造业的宏大版图中,工业机器人已成为无可争议的中流砥柱,发挥着不可替代的重要作用。从生产效率层面来看,工业机器人堪称提升产能的强力引擎。它们能够以极高的速度和精度,不知疲倦地执行各类复杂任务,无论是在汽车制造中精准的焊接、喷漆作业,还是电子设备生产里对微小零部件的精细装配,都不在话下。与人工相比,机器人不会因疲劳、情绪波动等因素而影响工作状态,可长时间稳定作业,极大地缩短了生产周期,提高了单位时间内的产出量 。
因此,人的工作往往由生产逐步过渡到管理,要求运用智能化、数字化手段去加强工作效率与管理水平,既要保障设备运行安全稳定,也能实现产能质量的不断提升。对此,物通博联提供接入埃斯顿、雅马哈、安川、发那科、现代、ABB等工业机器人,实时采集设备参数并对接到MES系统或ERP系统中,实现远程监控、故障告警、在线管理、数据分析等功能,为工业生产管理提供各种灵活可靠的应用。
工业智能网关采集埃斯顿机器人的配置操作
一、添加设备
登录网关管理界面,点击数采->数采配置->添加设备。
输入设备名称(任意),设备序号(设备序号不能重复),通信协议(ROBOT ESTUN),设备IP地址以及设备端口号,采集周期根据自身需求设置。

二、添加变量
点击 数采—数采配置—添加变量
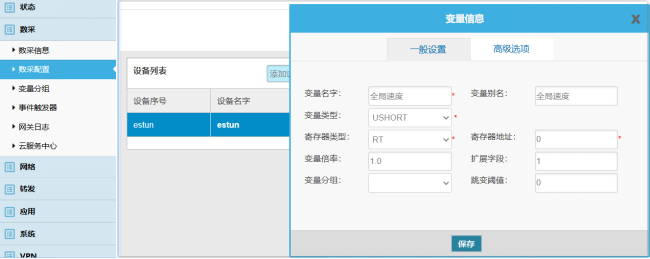
填写变量名(任意),变量别名(任意),变量类型(根据点位数据类型选择),寄存器类型(RT),寄存器地址(根据寄存器点位表 填写),然后点击保存。
添加之后,点击重启采集程序——点击确认后 提示成功生效
三、查看数据
点击“数采信息”->“变量数据”,即可在“变量数值”查看采集结果

采集的数据值为“NULL”,请核对数采配置中设备参数与变量参数信息是否和PLC参数一致及接线的正常。
采集的数据值不正确,请核对变量数据类型是否正确、是否需要调整倍率。
寄存器点位表:全局速度、手动、自动、远程、使能状态、运行状态、错误状态、机器人运行状态、机器人动作、加载工程名等等。
审核编辑 黄宇
-
机器人
+关注
关注
214文章
31651浏览量
224570 -
智能网关
+关注
关注
6文章
957浏览量
51971
发布评论请先 登录
基于RT-Thread的数字焊机与工业机器人通信网关设计|实战案例

海上光伏远程监控运维管理系统方案

巡检机器人联网监控在线管理系统方案

工业组态云平台实现多设备远程监控与数据可视化


全远程化运维管理的工业智能网关有哪些功能
如何实现FANUC/埃斯顿/汇川机器人与西门子PLC实时数据互传?
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
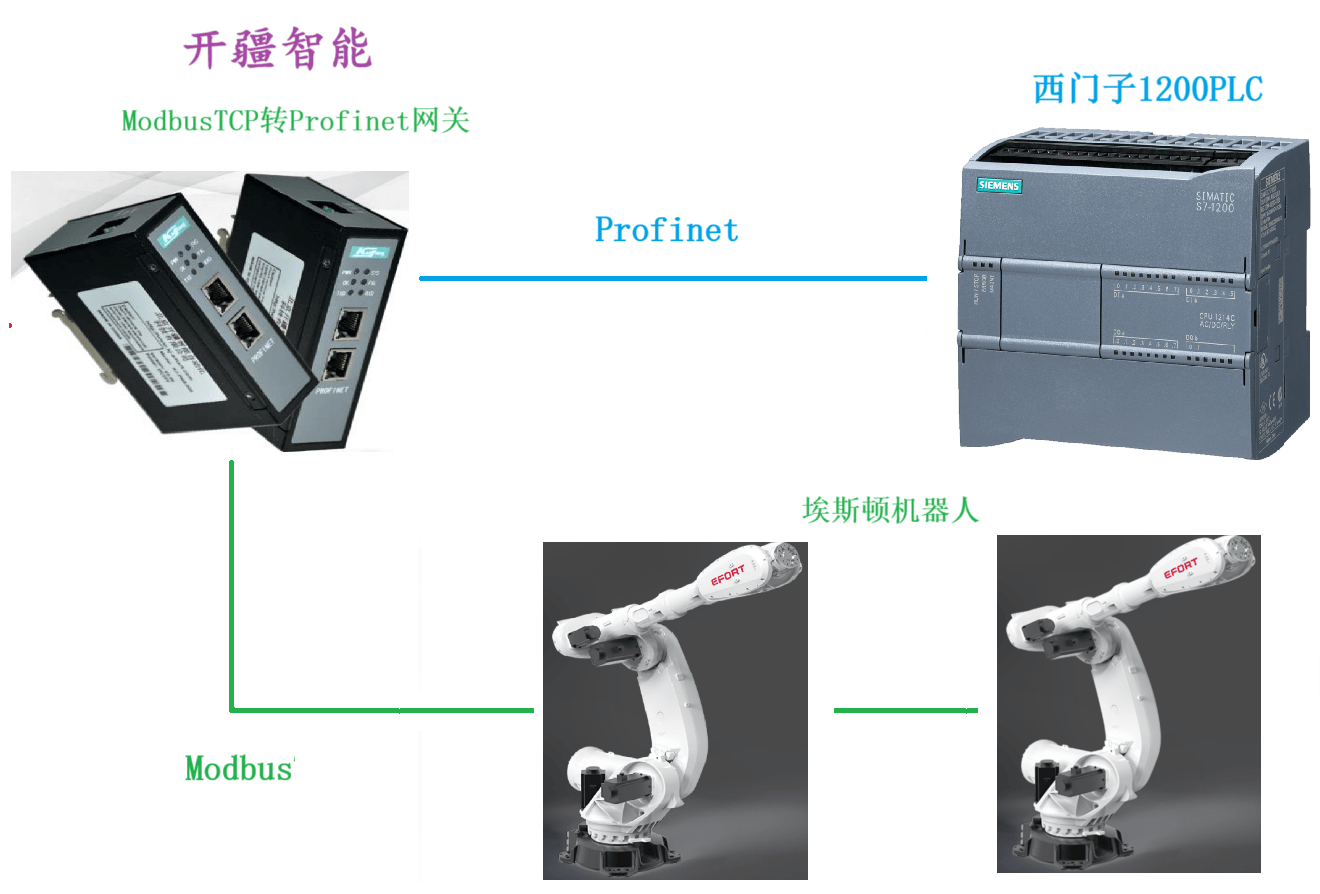
开疆智能ModbusTCP转Profient网关连接ER机器人配置案例
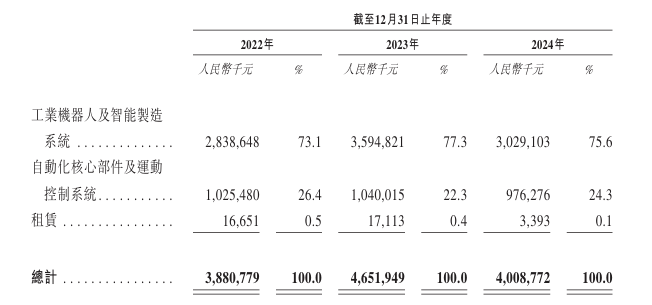
埃斯顿赴港IPO!境外收入超30%,Q1营收大涨93%
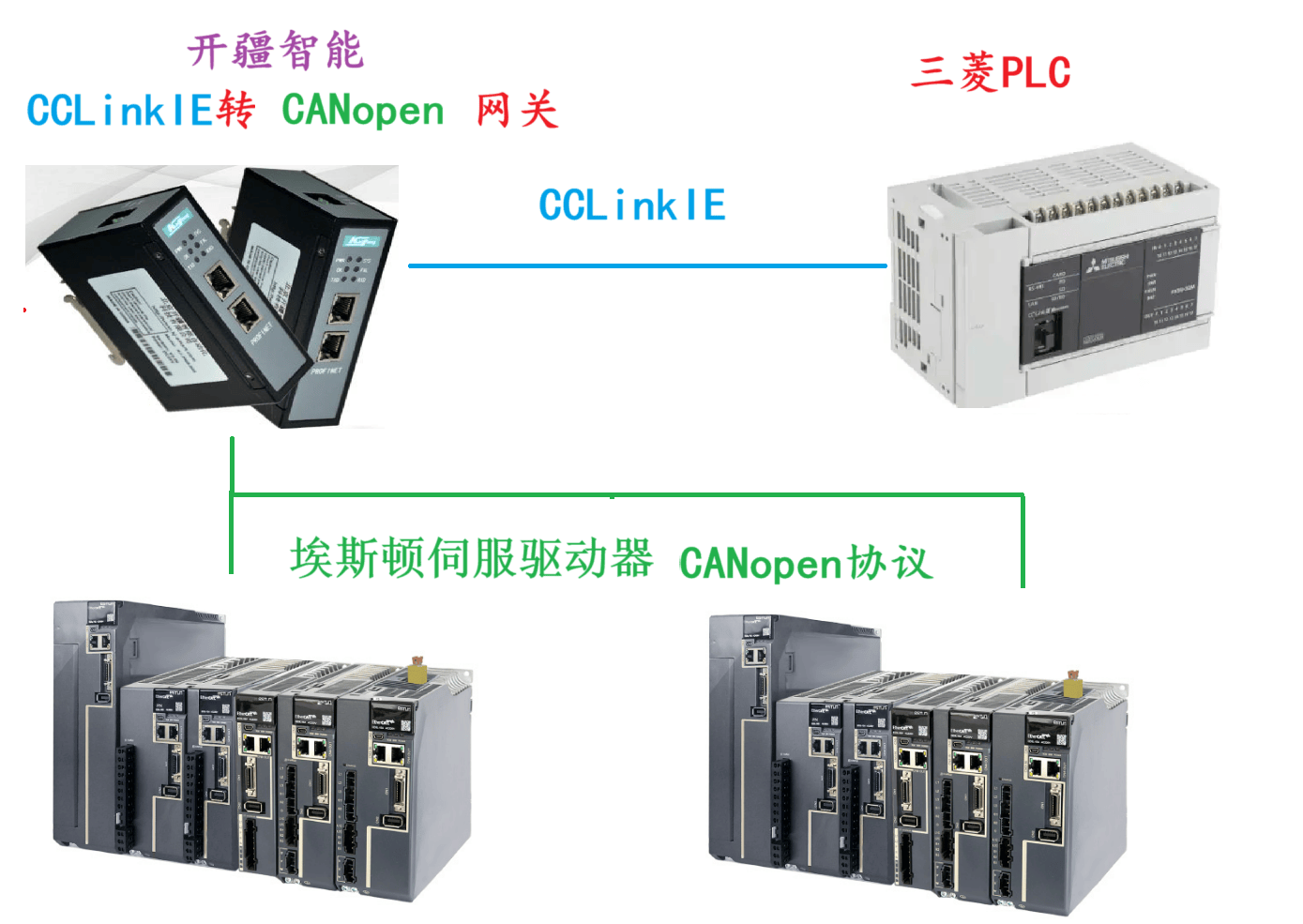
开疆智能CANopen转CCLinkIE网关连接埃斯顿伺服系统配置案例



评论