 基于RK3576开发板的多路网络摄像头取流方案
基于RK3576开发板的多路网络摄像头取流方案

1. 方案简介
方案示意图

2. 快速上手
如果您初次阅读此文档,请阅读:《入门指南/源码管理及编程介绍/源码工程管理》,按需管理自己工程源码(注:此文档必看,并建议采用【远程挂载管理】方式,否则有代码丢失风险!!!)。
2.1 源码工程下载
先在PC虚拟机定位到nfs服务目录,再在目录中创建存放源码仓库的管理目录:
cd ~/nfsroot mkdir GitHub cd GitHub
再通过git工具,在管理目录内克隆远程仓库(需要设备能对外网进行访问)
git clone https://github.com/EASY-EAI/EASY-EAI-Toolkit-3576.git
注:
* 此处可能会因网络原因造成卡顿,请耐心等待。
* 如果实在要在gitHub网页上下载,也要把整个仓库下载下来,不能单独下载本实例对应的目录。
2.2 开发环境搭建
通过adb shell进入板卡开发环境,如下图所示。
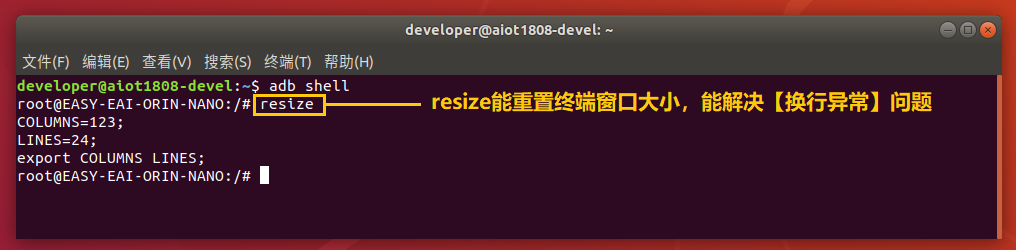
通过以下命令,把nfs目录挂载上nfs服务器。
mount -t nfs -o nolock < nfs server ip >:< nfs path in server > /home/orin-nano/Desktop/nfs/

2.3 例程编译
然后定位到nfs的挂载目录,再在目录中创建存放源码仓库的管理目录:
cd /home/orin-nano/Desktop/nfs/GitHub
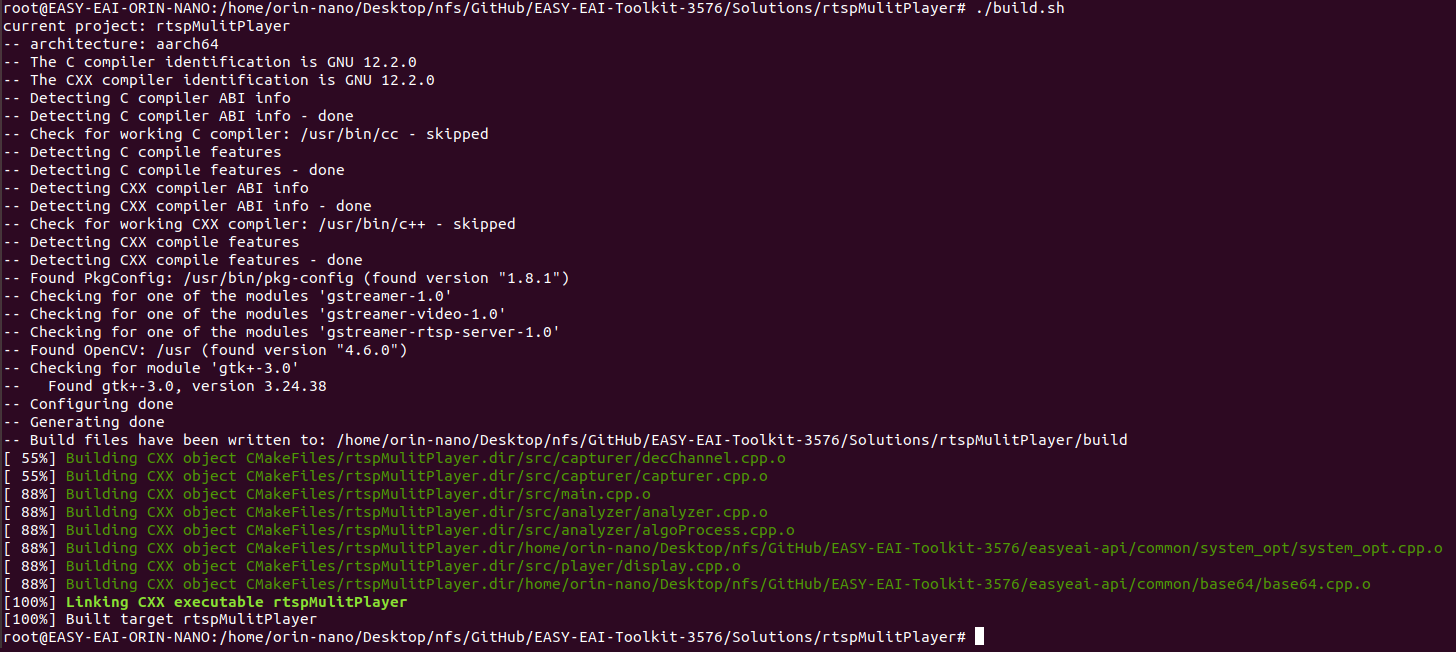
进入到对应的开发实例目录执行编译操作,具体命令如下所示:
cd EASY-EAI-Toolkit-3576/Solutions/rtspMulitPlayer/ ./build.sh
2.4 例程运行及效果
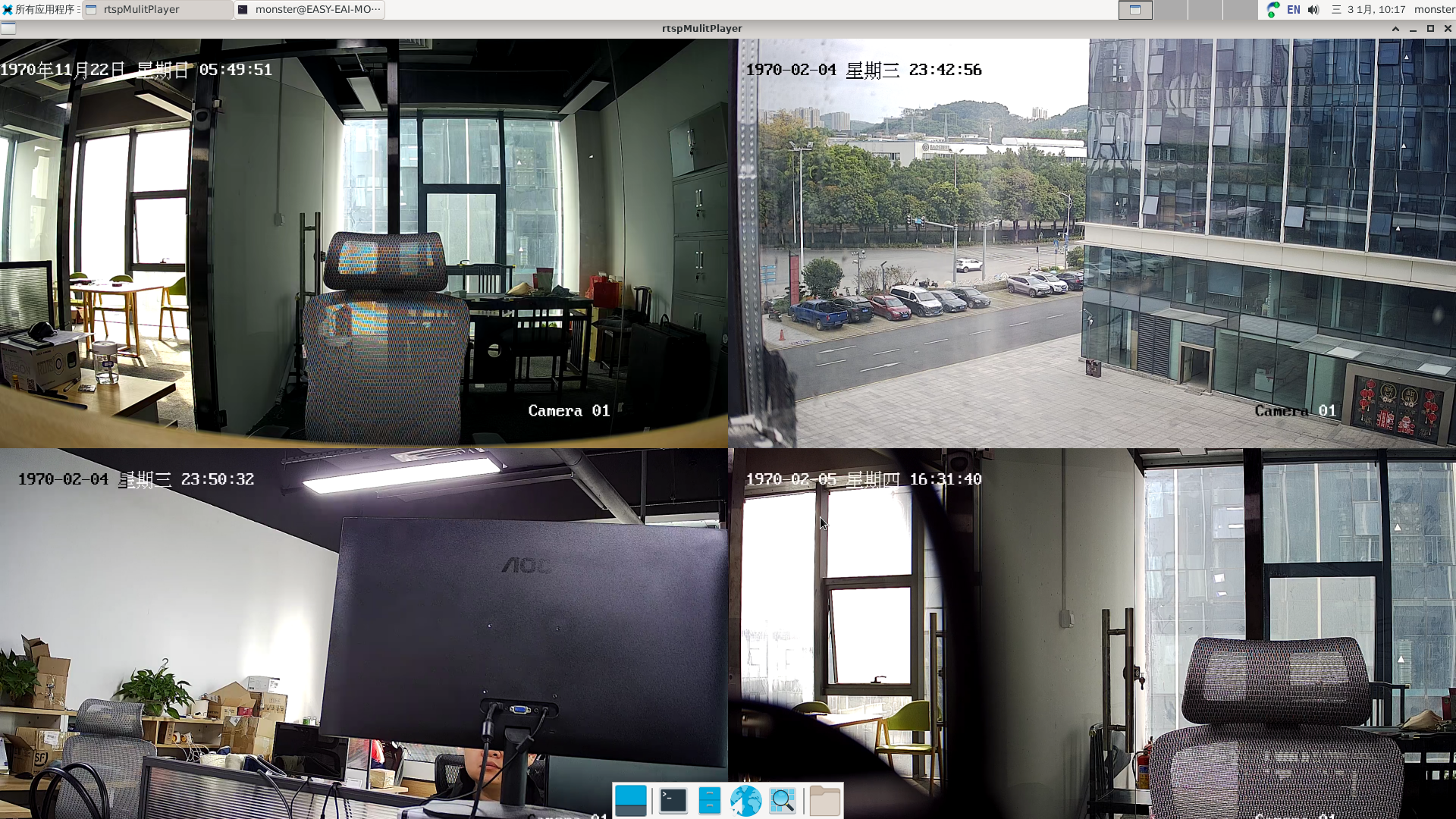
执行下方命令,运行示例程序:
./Release/rtspMulitPlayer
执行效果如下所示。
3. 设计说明
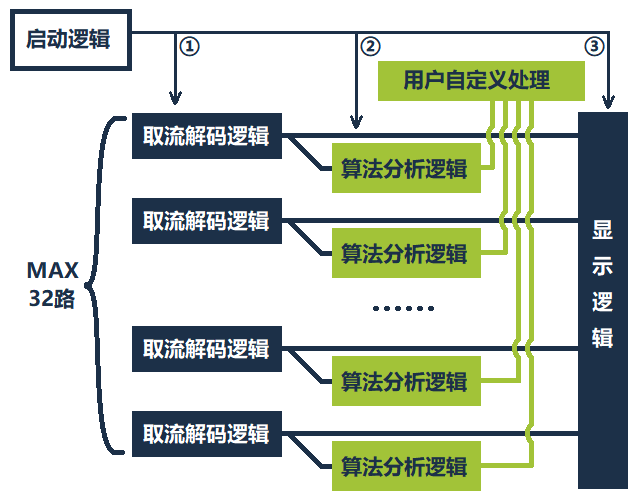
本开发实例由四大逻辑模块组成,分别是:启动逻辑、取流解码逻辑、算法分析逻辑、显示逻辑。
3.1 逻辑框图
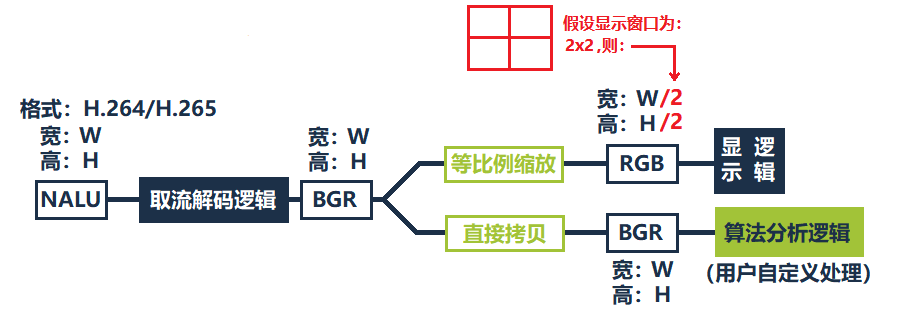
3.2 数据流图
3.3 代码组成
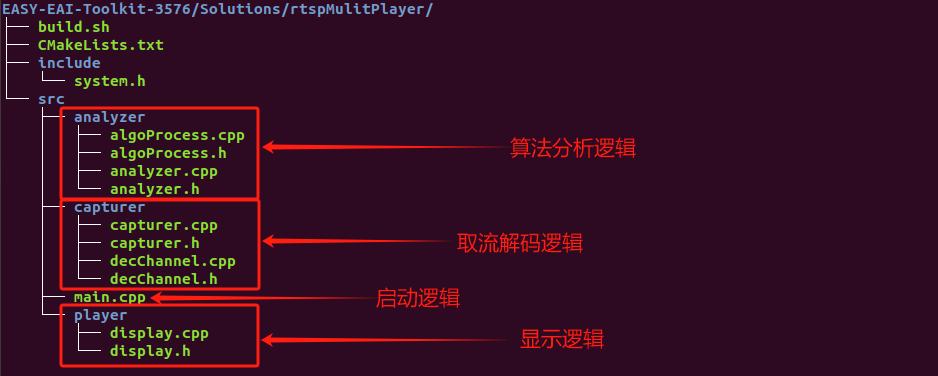
本开发实例相关的所有代码,均位于EASY-EAI-Toolkit-3576/Solutions/rtspMulitPlayer/中。其中:
启动逻辑位于:EASY-EAI-Toolkit-3576/Solutions/rtspMulitPlayer/src/main.cpp
取流解码逻辑位于:EASY-EAI-Toolkit-3576/Solutions/rtspMulitPlayer/src/capturer/
算法分析逻辑位于:EASY-EAI-Toolkit-3576/Solutions/rtspMulitPlayer/src/analyzer/
显示逻辑位于:EASY-EAI-Toolkit-3576/Solutions/rtspMulitPlayer/src/display/
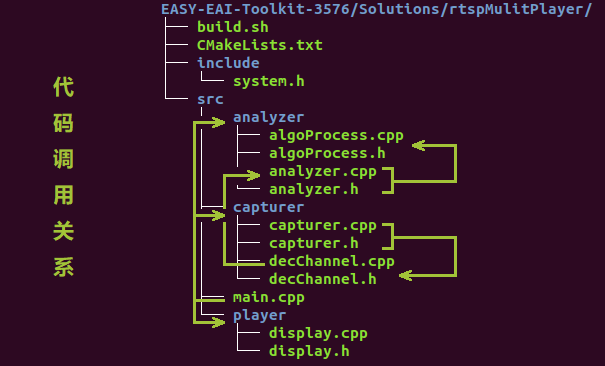
3.4 调用关系
4. 开发指南
4.1 Toolkit仓库介绍
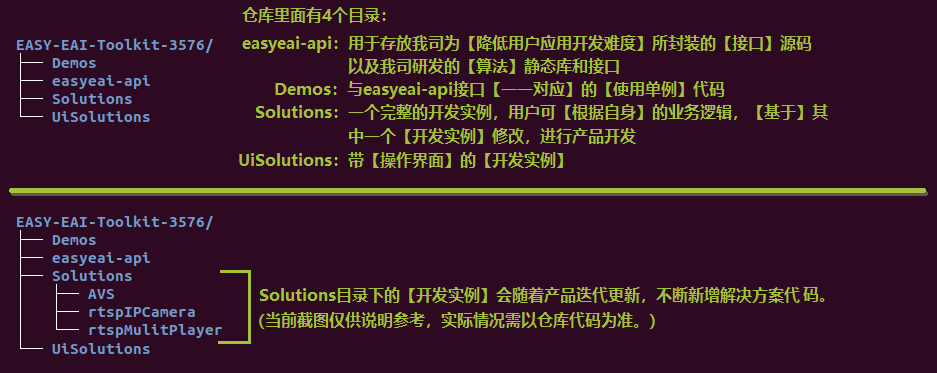
4.2 示例文件&目录结构
4.2.1 开发实例介绍
每个开发实例就是一个独立的项目,项目使用cmake构建自动编译部署。一个最简单的项目至少要包含以下元素:build.sh、CMakeLists.txt、main.c,如下所示。
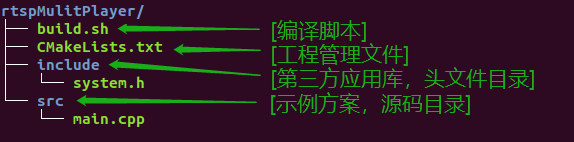
具体介绍如下所示。
| 组成部分 | 描述 |
| build.sh | 编译脚本,用于管理生成可执行文件后的部署准备工作,用户可自定义shell命令 |
| CMakeLists.txt | 工程管理文件,用于组织整个工程结构,指导cmake生成Makefile |
| include | 用于存放第三方应用库、头文件目录等 |
| src | 用于存放实现本方案需求的源代码 |
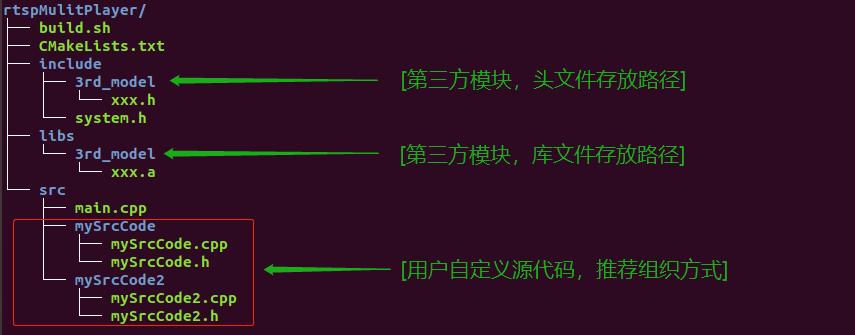
4.2.2 可拓展的目录
可拓展的目录是指:开发过程中增加某些功能模块,功能代码。增加模式分为两种:
增加已编译的第三方库,在include、libs目录内添加头文件和库文件;
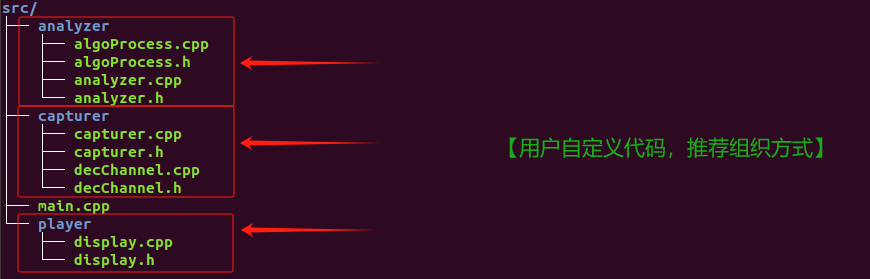
增加用户自定义的功能模块,推荐在src目录内增加;
具体情况如下所示,第三方模块相关的文件由include/3rd_model/xxx.h、libs/3rd_model/xxx.a。自定义的功能模块为src/mySrcCode、src/mySrcCode2。
4.3 CMakeLists.txt文件解析
4.3.1 编译环境配置部分:
第一部分为配置部分,配置部分如下所示。(获取当前方案目录、配置工具链、提取方案名称):
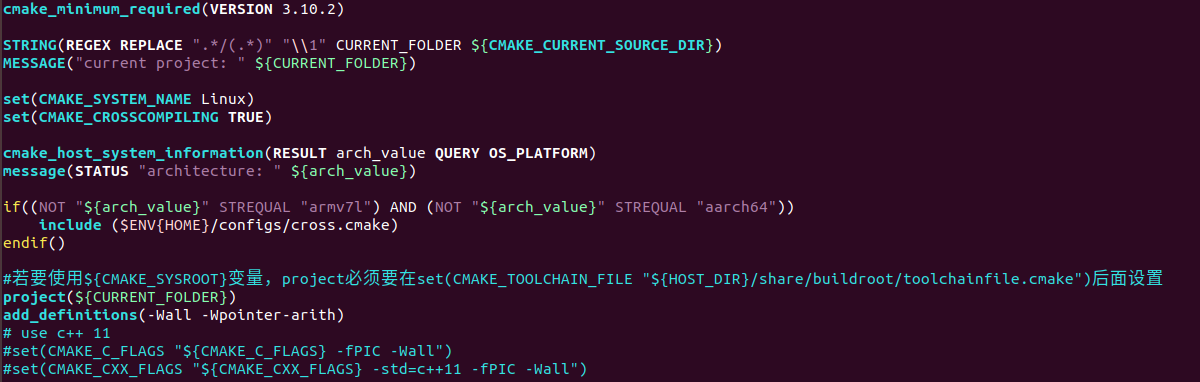
配置信息如下所示。
| 配置项 | 描述 |
| CMake要求版本 | cmake_minimum_required函数指定,要求的最低版本 |
| CMAKE_SYSTEM_NAME | cmake的系统类型,交叉编译必须 |
| CMAKE_CROSSCOMPILING | cmake是否启动交叉编译 |
| cross.camke | camke_host_system_information获取平台信息,发现不是armv7l或者aarch64就导入当前平台的交叉编译配置。 |
| project项目名 | 由project函数指定 |
4.3.2 easyeai-api配置部分
第二部分是引入我司的功能组件库(针对当前方案进行:配置EASY EAI API头文件目录${XXX_INCLUDE_DIRS}、源码文件目录${XXX_SOURCE_DIRS}以及所依赖的库参数${XXX_LIBS}):
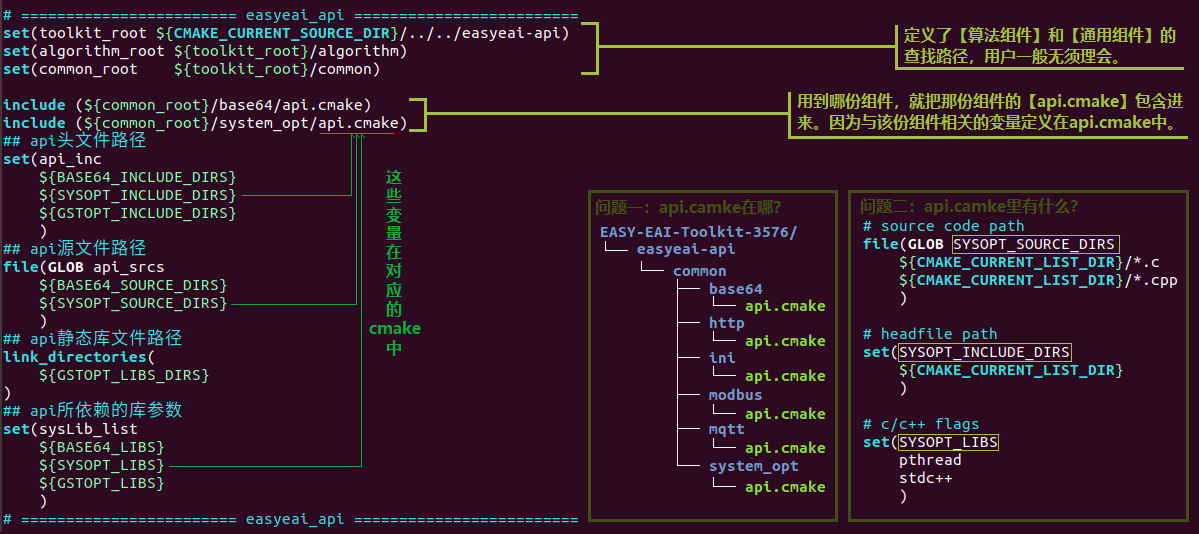
配置信息如下所示。
| 配置项 | 描述 |
| api_inc | 最终通过target_include_directories关键字指定目标包含的头文件路径 |
| api_srcs | 最终通过add_executable关键字指定所需easyeai-api的源码 |
| sysLib_list | 最终通过target_link_libraries关键字指定easyeai-api所需的库参数 |
4.3.3 第三方库配置部分
第三部分配置第三方的库(针对当前方案进行:配置第三方头文件目录、库文件目录、配置第三方库链接参数以及配置源码目录):

配置信息如下所示。
| 配置项 | 描述 |
| custom_inc | 自定义变量custom_inc,最终通过target_include_directories函数指定目标包含的头文件路径,在源码include目录下 |
| link_directories | 由link_directories函数指定第三方库所在路径 |
| custom_libs | 自定义变量custom_libs,最终通过target_link_libraries函数指定目标引用的库链接参数 |
| aux_source_directory | 自定义变量dir_srcs,用于添加工程代码以及自定义的个人代码 |
例如添加个人库的目录组成方式如下所示。
aux_source_directory的修改方式为:
aux_source_directory(./src ./src/mySrcCode ./src/mySrcCode2 dir_srcs)
或
aux_source_directory(./src dir_srcs) aux_source_directory(./src/mySrcCode dir_srcs) aux_source_directory(./src/mySrcCode2 dir_srcs)
4.3.4 本方案配置部分
第四部分配置项目的编译信息,内容如下所示:

配置项如下所示。
| 配置项 | 需求 |
| add_executable |
编译结果为${CURRENT_FOLDER}指定,即方案目录名; 编译的源文件为${dir_srcs}和${api_srcs}指定; |
| target_include_directories | 指定头文件的名字,由${custom_inc}与${api_inc}指定; |
| target_link_libraries | 指定的库编译参数,由${custom_libs}与${sysLib_list}指定; |
4.4 build.sh编译脚本:
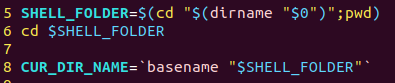
4.4.1 路径定位部分
第一部分用于提取目录用于编译操作,内容如下所示:(进入build.sh脚本所在目录,并且提取当前目录绝对路径,提取当前目录名称)
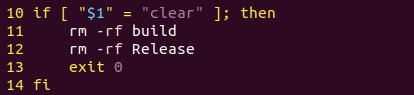
4.4.2 清除编译部分
第二部分清除操作,清除目录为build、Release,内容如下所示:(执行build.sh脚本时,带入了参数“clear”,则清空编译输出)
4.4.3 编译操作
第三部分,编译直接调用cmake,内容如下所示:(重新编译,成部署目录,并把资源自动部署进板卡)


审核编辑 黄宇
-
摄像头
+关注
关注
61文章
5133浏览量
103635 -
开发板
+关注
关注
26文章
6507浏览量
121363 -
rk3576
+关注
关注
1文章
315浏览量
1719
发布评论请先 登录
YOLO5目标检测方案-基于米尔RK3576开发板
RK3576基于UVC协议USB摄像头配置指南,手把手教你搞定
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
车载360环视平台:米尔RK3576开发板支持12路低延迟推流
瑞芯微RK3576多路AHD摄像头实测演示,触觉智能配套AHD硬件方案
360环视硬件平台为什么推荐使用米尔RK3576开发板?
12 路低延迟推流!米尔 RK3576 赋能智能安防 360° 环视
【作品合集】米尔RK3576开发板测评
【作品合集】灵眸科技EASY EAI Orin Nano(RK3576)开发板测评
【米尔RK3576开发板免费体验】测评综合解析
12路1080P高清视频流,米尔RK3576 开发板赋能车载360环视
米尔RK3576核心板,让360环视技术开发更简单
迅为八核高算力RK3576开发板摄像头实时推理测试 RetinaFace人脸检测
迅为八核高算力RK3576开发板摄像头实时推理测试 ppyoloe目标检测





评论