 ADA4570具有差分输出的集成AMR角度传感器和信号调节器技术手册
ADA4570具有差分输出的集成AMR角度传感器和信号调节器技术手册

概述
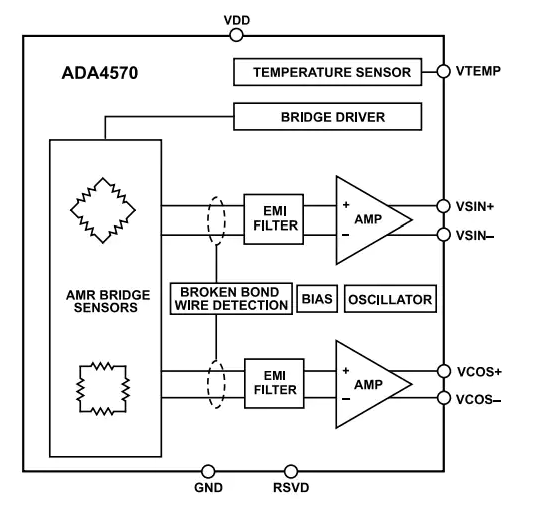
ADA4570 是一款各向异性磁阻 (AMR) 传感器,具有集成信号调理放大器和模数转换器 (ADC) 驱动器。ADA4570 产生两个差分模拟输出,指示周围磁场的角位置。
ADA4570 由一个封装内的两个裸片、一个 AMR 传感器和一个固定增益仪器仪表放大器组成。当磁场在 x 轴和 y 轴 (x-y) 平面上旋转时,ADA4570 提供与角度相关的放大差分余弦和正弦输出信号。输出电压范围与电源电压成比例。
传感器包含两个惠斯通电桥,彼此成 45 度角。偶极磁铁的完整旋转会在正弦输出上产生两个周期。因此,根据 SIN 和 COS 差分输出计算出的磁角 (α) 代表了在 0° 至 180° 测量范围内,磁体相对于 ADA4570 的物理方向。在 x-y 平面的均匀场内,ADA4570 的输出信号与 z 方向(气隙)的物理位置无关。
ADA4570 采用 8 引脚 SOIC 封装。
数据表:*附件:ADA4570具有差分输出的集成AMR角度传感器和信号调节器技术手册.pdf
应用
- 绝对位置测量(线性和角度)
- 无刷直流电机控制和定位
- 执行器控制和定位
- 非接触式角度测量和检测
- 磁性角位置检测
特性
- 非接触式角度测量
- 高精度 180 度角传感器
- 典型角度误差为 ±0.1°
- 850 μV rms 低输出噪声
- 正弦和余弦差分输出
- 比率模拟电压输出
- 可忽略的滞后
- 兼容 SAR 或 Σ-Δ ADC
- 温度补偿 AMR 桥
- 工业温度范围:−40°C 至 +125°C
- 汽车温度范围:−40°C 至 +150°C
- 抗电磁干扰
- 故障诊断
- V
DD范围为 2.7 V 至 5.5 V - 30000 rpm 时的最小相位误差为 0.85°
- AEC-Q100 适用于汽车应用
- 单芯片解决方案
- 采用 8 引脚 SOIC 封装
框图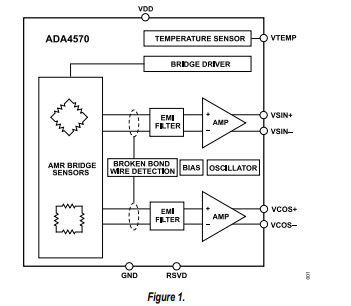
引脚配置描述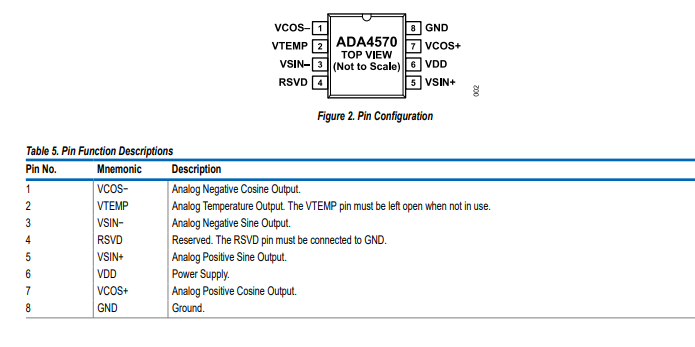
典型性能特征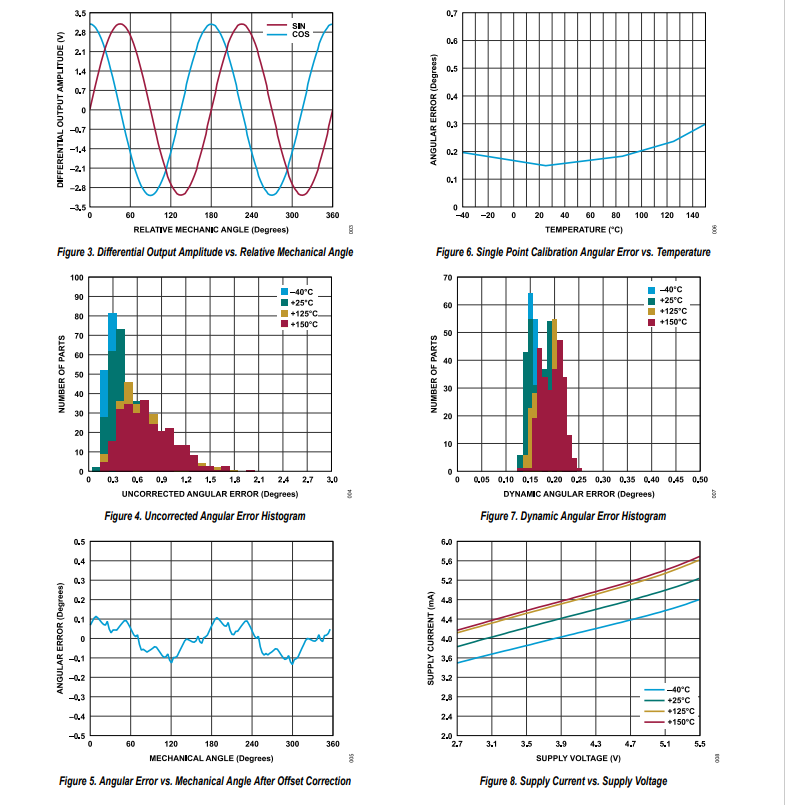
术语
输出信号
AD4570的输出信号VSIN+、VSIN-、VCOS+和VCOS- 以VDID2为共模电压,如图14所示。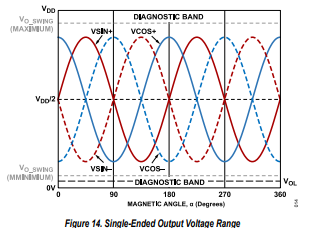
图15中所示的差分信号输出VSIN和VCOS,是通过对相应的正、负SIN和COS单端输出进行采样生成的。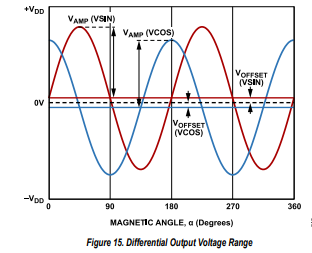
参考位置误差
参考位置误差是传感元件中心与图22所示的标称位置之间的偏差。
参考角度误差
参考角度误差,如图16所示,是传感器与其标称安装位置之间的绝对安装角度误差。0°参考角是引脚2和引脚7之间的直线。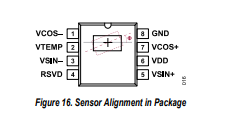
未校正角度误差
未校正角度误差是在未对VSIN和VCOS差分信号应用任何角度校准的情况下,与理想角度的最大偏差。
单点校准角度误差
单点校准角度误差是在25°C下对VSIN和VCOS差分信号应用一次偏移校准后,与理想角度的偏差。
动态角度误差
动态角度误差是对VSIN和VCOS差分信号应用连续偏移和增益校准后,与理想角度的最大偏差。
输出幅度同步
输出幅度同步 (k) 定义为在相同磁场角度下,两个通道的差分幅度之比。当实现幅度同步时,可使用以下等式计算幅度同步:
传播延迟
传播延迟是指VSIN和VCOS差分信号在响应磁场激励时传播所需的时间。
相位误差
相位误差定义为正弦和余弦信号通过放大器时的平均相移。相位误差会增加信号的相对频率裕度。仪表放大器的带宽限制特性如图12所示,典型特性值可作为一阶补偿。
正交误差
正交误差是由于芯片上正弦和余弦传感元件未对准至90°而导致的内部相位误差。
单端输出电压低
单端输出电压低是VSIN-和VCOS- 引脚断开或短路且电源电压低于某个值时的最大电压。
-
传感器
+关注
关注
2578文章
55892浏览量
795745 -
AMR
+关注
关注
3文章
497浏览量
32351 -
ADC
+关注
关注
0文章
228浏览量
16845
发布评论请先 登录
【设计技巧】想搞BLDC电机控制,就必须要懂的角度传感器
AMR传感器如何区分北极和南极

TMAG6181-Q1具有集成圈数计数器的高精度模拟AMR角度传感器数据表

PGA302具有 0-5V 比例输出的传感器信号调节器数据表
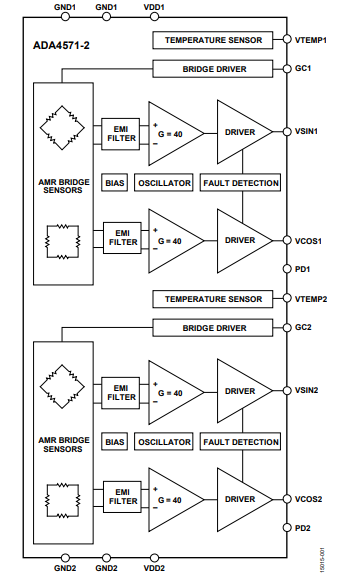
ADA4571-2双集成式AMR角度传感器和信号调理器技术手册
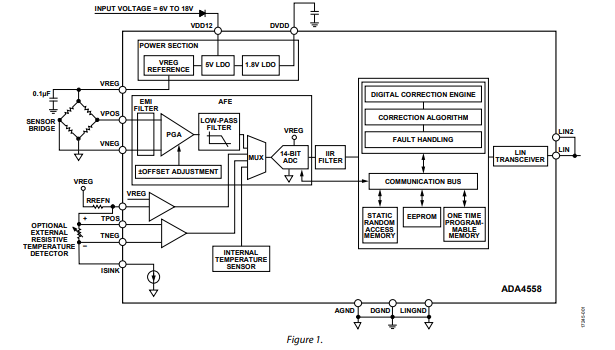
ADA4558具有LIN接口、非线性校正、温度补偿的桥式传感器信号调节器IC技术手册
Analog Devices Inc. AD4570 AMR磁阻传感器数据手册



评论