 profinet转ethercat网关的自动上料机械手集成案例
profinet转ethercat网关的自动上料机械手集成案例

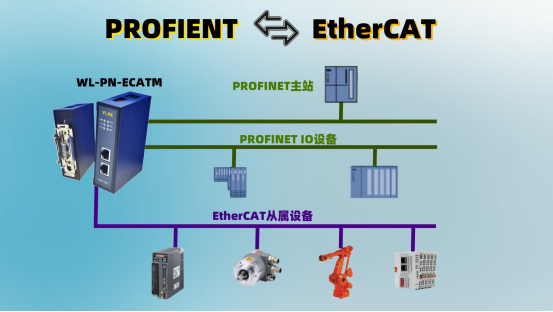
生产线还包含多台自动上下料机械手,采用了完整的混合网络解决方案:
机械手控制系统采用欧姆龙运动控制器作为主控,伺服电机负责机械手臂的精确定位。

通过协议转换技术系统实现:
机械手6轴协同运动控制,位置精度达±0.02mm
分布式I/O模块通过ethercat连接视觉传感器和力反馈系统
安川伺服完美兼容两种协议的控制指令,确保平稳运行
实现生产状态数据的统一采集,支持设备预防性维护
此集成方案显著提升了生产效率,产线节拍提高25%,不良率降低超过40%。该解决方案已成为日本汽车零部件制造行业的标杆案例,展示了不同工业通信协议融合的成功实践。
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
网关
+关注
关注
9文章
7112浏览量
56771 -
Profinet
+关注
关注
9文章
2418浏览量
28503 -
ethercat
+关注
关注
20文章
1639浏览量
46454
发布评论请先 登录
相关推荐
热点推荐
EtherCAT转Profinet网关与一体式伺服EtherCAT通讯系统配置要点
EtherCAT转Profinet网关与一体式伺服EtherCAT通讯系统配置要点 西门子S7-1200PLC经

疆鸿智能EtherCAT转DeviceNet网关:制药产线异构集成的关键枢纽
疆鸿智能EtherCAT转DeviceNet网关:制药产线异构集成的关键枢纽 在制药自动化项目中,我们常面临异构设备网络

精准控能耗,协议零阻碍!EtherCAT转 Profinet网关技术赋能
第三方设备默认支持Profinet。在这种情况下,EtherCAT转Profinet网关也方便了这些设备与基于
Profinet转Modbus网关:工业自动化协议转换的理想解决方案
在工业自动化领域,不同厂商的设备常常采用不同的通信协议,这给系统集成带来了巨大挑战。其中, Profinet与Modbus RTU 的互联尤为常见。 作为解决这一难题的专家,天津滨海新区三格

ETHERCAT从站转PROFINET,一个网关全搞定
ETHERCAT从站转PROFINET,一个网关全搞定 在矿山深处,一套崭新的自动化系统正悄然改变着设备保护的格局。面对井下复杂的工况和多品

SMC串行传输系统通过Profinet转EtherCAT网关进行连接的配置案例
SMC串行传输系统通过Profinet转EtherCAT网关进行连接的配置案例 本案例是通过使用稳联技术研发的EtherCAT
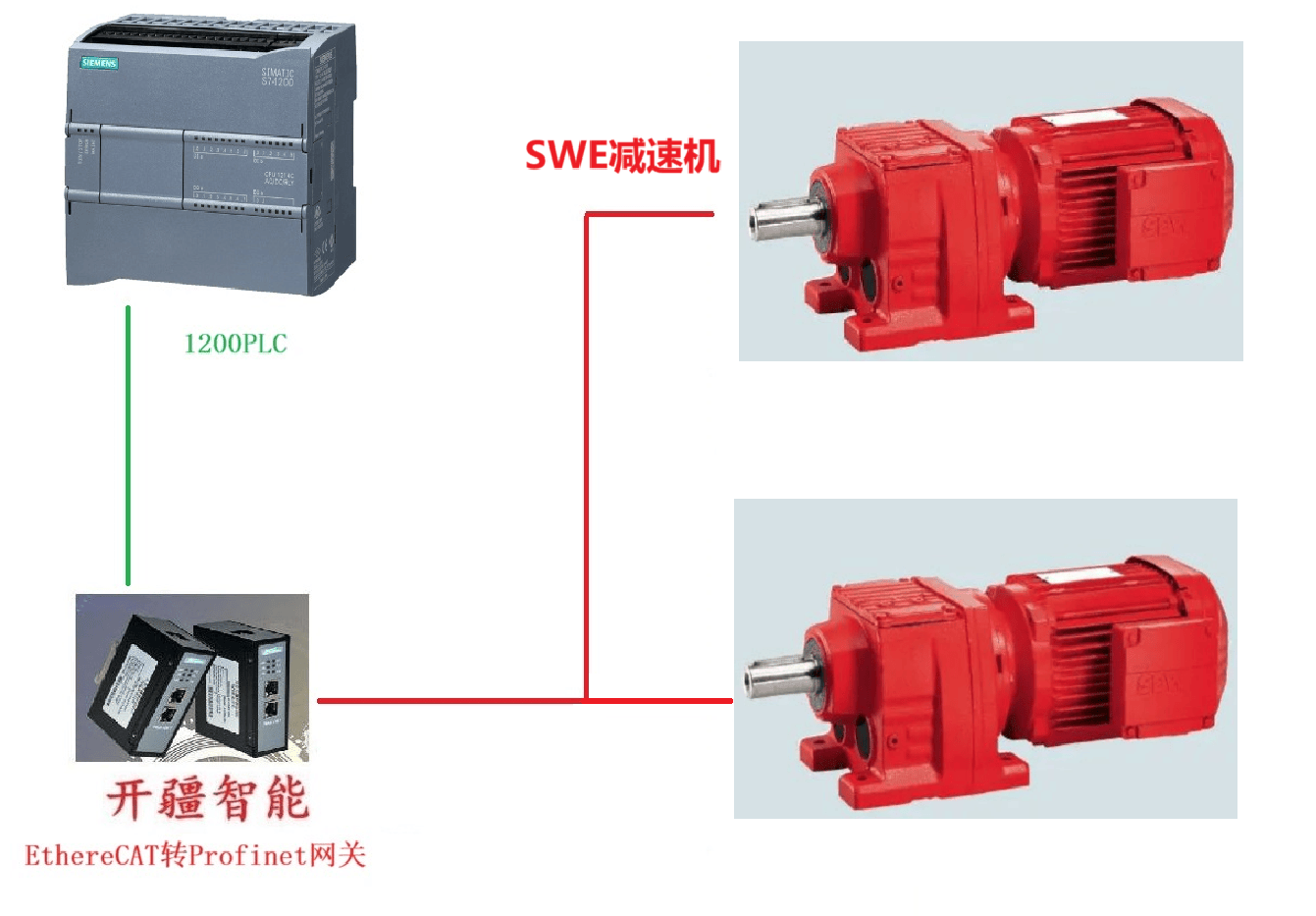
开疆智能Profinet转EtherCAT网关连接SWE减速机配置案例
该案例是西门子PLC通过Profinet转EtherCAT网关对SWE减速机进行操控。网关数据通过Pro
EtherCAT转Profinet网关与汇川伺服系统集成及轮廓模式应用解析
在工业自动化领域,实现不同总线协议设备间的无缝协作是提升生产效率的关键。本文将围绕EtherCAT主站转Profinet网关与汇川伺服系统的

工业自动化中EtherCAT转Profinet网关的速度控制模式配置与优化
在工业自动化系统中,不同通信协议的设备互连常需借助协议转换网关。例如将支持EtherCAT协议的汇川伺服驱动器接入西门子Profinet网络时,需通过

EtherCAT转Profinet网关在汇川伺服转矩控制中的集成应用与实现
在工业自动化领域,设备间的通信协议兼容性直接决定了系统集成的效率与稳定性。以EtherCAT主站转Profinet

PROFINET转EtherCAT网关的基础原理应用
IO站点可能采用不同的协议。 PROFINET转EtherCAT网关工作原理 于PROFINET端,网关
硬干货,profinet转Ethercat主网关应用方案落地分享
自动化任务的概述,EtherCat转ProfiNet网关模块连接西门子S7-1200 PLC(PROFI

禾川伺服驱动器与EtherCAT主站转Profinet网关的双向数据交换
与采用Profinet协议的设备(如禾川伺服驱动器和PLC)进行通信时,一个高效、稳定的网关设备就显得尤为重要。本文将深入探讨EtherCAT主站转
号外!PLC安川伺服,通过Profinet转EtherCAT网关同步多个工作站
号外!PLC安川伺服,通过Profinet转EtherCAT网关同步多个工作站




评论