 发那科机器人A型控制柜急停板安全回路接线方法
发那科机器人A型控制柜急停板安全回路接线方法

发那科机器人A型控制柜的安全回路接口涵盖了外部急停输入、安全门开关、机器人急停输出以及伺服切断等多个功能,这些接口均通过硬接线进行连接。在操作FANUC机器人时,必须启用急停板安全回路,任何试图用其他方法替代急停板安全回路的做法都是严禁的。本文将详细介绍FANUC机器人A型控制柜的急停板安全回路接口及其接线方法。
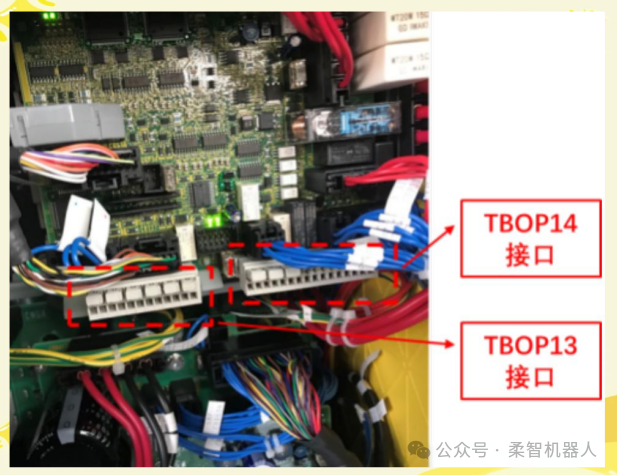
首先,让我们了解一下A型控制柜的基本结构。A型控制柜,简称A柜,其内部左上角位置是急停电路板的所在。其次,我们将聚焦于A型控制柜的急停板安全接口。该接口包含两个白色的端子台:TBOP13和TBOP14。
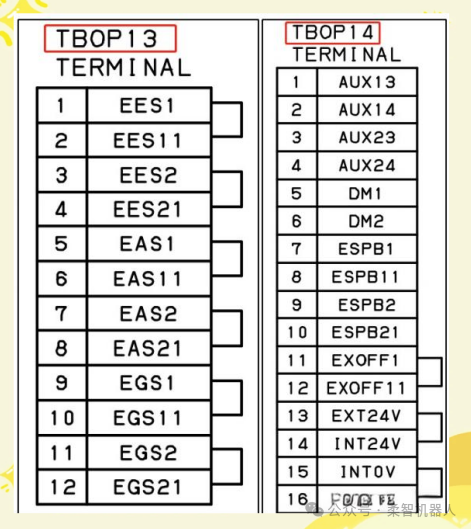
TBOP13端子拥有12个接口,从右至左编号为1-12,其接口定义详见下图。具体来说,1-4号接口为外部急停输入双回路(EES),5-8号接口为安全门双回路(EAS),而9-12号接口则为伺服通断双回路(EGS)。这些接口在出厂时已默认设置为短接状态。
TBOP14端子则配备了16个接口,编号同样从右至左为1-16,其接口定义同样展示在下图中。其中,7-10号接口常用于机器人急停输出双回路(ESPB),而11-12号接口则涉及外部电源通断开关(EXOFF)。需注意,11-16号接口在出厂时也是预设为短接状态。
3 A-控制柜安全回路接线
1)外部急停输入
在开始接线之前,请务必确保机器人已完全断电。完成接线后,应使用万用表进行检验,以确保接线无误。
外部急停输入部分包含安全双回路设计,具体如下:1-EES1与2-EES11,3-EES2与4-EES21,这两组触点各自独立,且在出厂时已预设为短接状态。
在需要启用外部急停输入功能时,需先移除原有的短接片,接着按照图示进行正确的接线操作。
完成上述接线后,若外部急停被触发,机器人会即刻停止所有动作并触发报警系统。
注意:在接线过程中,有些用户可能会考虑简化操作,提出将EES2短接到EES1,EES21短接到EES11,或者仅短接其中一个回路,然后仅在外部接入一个回路。然而,这些做法都是严格禁止的,因为它们可能导致保险丝烧毁或链路异常报警。务必遵循上述的接线方法,确保双回路中的两个回路能够独立且同步地工作。
2)安全门开关
安全门开关设计为安全双回路,如上图所示,5-EAS1与6-EAS11,7-EAS2与8-EAS21构成两组独立的触点,出厂时默认处于短接状态。
若需使用安全门开关,需移除短接片并按照接线方法进行连接。连接完成后,当门开关打开时,机器人将只能执行手动操作,无法启动自动运行。
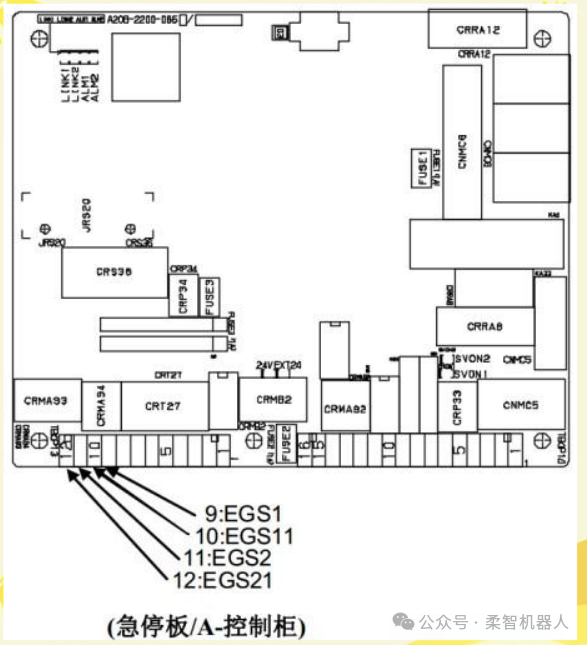
3)伺服通断开关
伺服通断开关同样设计为安全双回路,其触点组合为9-EGS1与10-EGS11,以及11-EGS2与12-EGS21,这两组触点在出厂时默认处于短接状态。
若需启用伺服通断开关,需先移除短接片,并参照外部急停输入的接线方法进行连接。一旦伺服通断开关断开,机器人将无法正常伺服上电,并会触发报警机制。
4)外部电源通断开关
外部电源通断开关在出厂时同样处于短接状态,其触点编号为11-EXOFF1与12-EXOFF11。通过移除短接片并按照特定接线方法进行连接,即可启用该开关。一旦外部电源通断开关断开,机器人将无法正常接收外部电源供电,从而触发相应的报警机制。
当需要启用外部电源通断开关时,应首先移除短接片,并按照相应的接线方法进行连接,如上图所示。在外部电源通断开关处于闭合状态时,可以利用机器人断路器来执行控制装置的上电操作;然而,一旦外部电源通断开关断开,便无法通过机器人断路器进行上电操作。
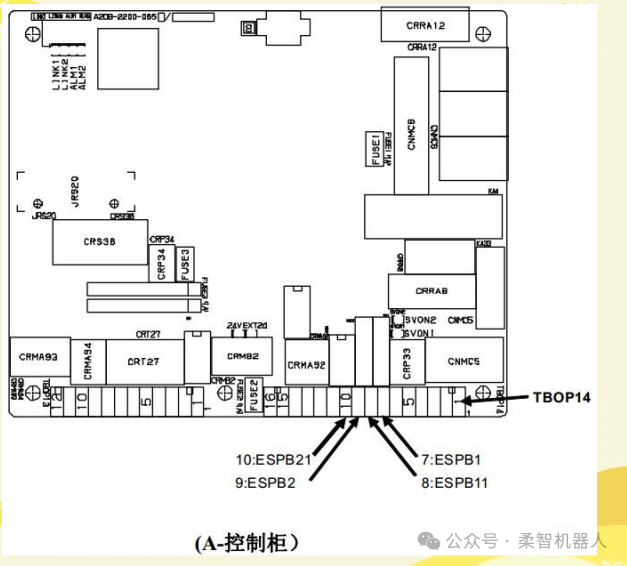
此外,机器人还配备了安全双回路的急停输出功能,包括7-ESPB1与8-ESPB11,9-ESPB2与10-ESPB21两组独立的触点,以确保在紧急情况下能够迅速切断电源,保障操作安全。
当需要启用机器人急停输出功能时,只需在相应的触点上按照外部急停输入的接线方法进行连接即可。系统急停输出的控制原理如下:一旦示教器或控制面板上的急停按钮被按下,线圈KA21和KA22的电源将被切断,同时ESPB1至ESPB11以及ESPB12至ESPB21的触点将被激活。此外,当控制装置的电源被断开时,无论急停按钮的状态如何,这些触点同样会保持开启状态。
4 安全回路测试
1)急停回路测试
测试急停按钮功能:在机器人低速运行状态下,逐个按下系统设定的急停按钮,观察机器人是否能够迅速产生急停并停止运动。同时,查看机器人示教器上的报警代码是否显示为SRVO-007(表示机器人外部急停)。若机器人未能立即停止或报警代码不符,则需检查整个急停回路的线路连接。
2)安全门回路测试
测试门开关功能:在低速运行状态下,逐个打开安全门,观察机器人是否能够立即停止运行并发出报警。查看示教器上的报警代码,确认是否为SRVO-004。通常,系统中的所有安全门都是串联连接的,因此若任意安全门无法触发安全停止,请检查安全门回路的连接是否正常。
5 常见报警及处理
1 SRVO-213 E-STOP Board FUSE2 blow
故障现象:机器人显示“SRVO-213 E-STOP Board FUSE2 blow”(急停板保险丝2熔断)的报警。
故障原因:在使用急停板安全回路时,可能由于信号接线错误或短路导致保险丝熔断。
处理方案:首先检查急停板安全回路的接线,确保无误后,若问题仍未解决,再进一步排查其他硬件故障,如急停板本身的故障。
2 SRVO-230 或 SRVO-故障现象:机器人出现与链路异常相关的报警,如SRVO-230或SRVO-231。
故障原因:在使用急停板安全回路时,可能发生了双回路安全信号的不一致,即回路1和回路2的接点状态出现矛盾。
处理方案:同样需要检查急停板安全回路的接线,确保双回路信号的一致性。若无法解决问题,再进一步排查其他硬件故障。
-
机器人
+关注
关注
214文章
31700浏览量
224670 -
接口
+关注
关注
33文章
9648浏览量
157854 -
接线
+关注
关注
29文章
813浏览量
35429 -
控制柜
+关注
关注
4文章
189浏览量
22498
原文标题:FANUC机器人控制柜急停板接线方法
文章出处:【微信号:faircs,微信公众号:柔智机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
RC180爱普生机器人控制柜
ABB机器人控制柜报警相关数据恢复的维修介绍
工程需求工控备件、三菱数控备件、发那科机器人备件、西门子控制柜备件plc
发那科机器人系统回收 发那科机器人配件常年高价回收
YAMAHA机器人 RCX240控制柜参数
发那科推出推出两款新型长臂版协作型机器人,具有哪些优势
基于KUKA C4机器人的控制柜(CCU)设计




评论