 谐波减速器工作原理 谐波减速器与齿轮减速器的区别
谐波减速器工作原理 谐波减速器与齿轮减速器的区别

一、谐波减速器的工作原理
谐波减速器是一种高精度、高效率的减速装置,广泛应用于机械设备、工业自动化、机器人等领域。其核心工作原理基于谐波传动原理,即利用柔性轮和内齿圈之间的弹性变形和嵌合来实现传动和减速。
- 基本构成
谐波减速器主要由三个基本元件构成:驱动轴、谐波发生器(包括波发生器和内齿圈)、柔性轮(弹性轮)以及输出轴。其中,波发生器通常是一个椭圆形或类似形状的构件,通过轴承插入柔性轮内部。 - 工作原理详解
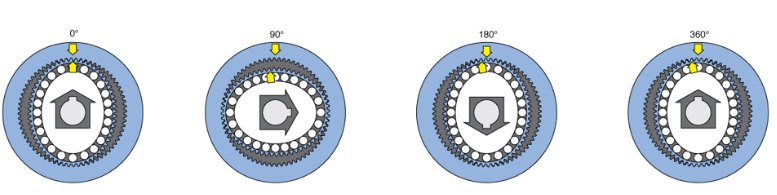
- 驱动轴传动 :当驱动轴开始旋转时,固定在驱动轴上的波发生器开始旋转。波发生器上的凸轮与柔性轮上的凹槽相互嵌合,使柔性轮开始发生弹性变形。
- 谐波传动 :由于柔性轮的凹槽数量通常比波发生器上的凸轮数量多,因此当波发生器旋转时,柔性轮会以较慢的速度旋转,从而实现减速效果。同时,柔性轮和内齿圈之间的弹性变形和嵌合也保证了传动的高精度和高刚性。
- 输出轴传动 :当柔性轮开始旋转时,输出轴上的外齿圈也开始旋转。外齿圈上的齿与输出轴上的内齿圈相互嵌合,使输出轴开始旋转。通过这样的传动方式,谐波减速器将驱动轴的高速旋转转换为输出轴的低速高扭矩旋转。
- 特点
- 高精度 :由于多齿同时啮合以及弹性变形的均匀性,使得传动精度非常高,传动误差较小。
- 高承载能力 :尽管体积小巧,但因多齿啮合且柔轮材料具备高强度,使得其能承受较大的轴向和径向负载。
- 传动效率高 :谐波齿轮减速器的传动效率可达90%以上,损耗小,适合长期高效运行。
- 低噪音 :因其工作方式为弹性接触而非硬性碰撞,所以运转噪声较低。
- 传动比大 :单级谐波齿轮减速器的传动比可在较大范围内变化,多级串联后传动比可以做得更大。
二、谐波减速器与齿轮减速器的区别
谐波减速器和齿轮减速器在工作原理、结构特点、性能表现以及适用范围等方面存在显著差异。
- 工作原理
- 谐波减速器 :利用谐波传动原理,通过柔性轮和内齿圈之间的弹性变形和嵌合来实现传动和减速。这种传动方式具有高精度、高刚性和低噪音等特点。
- 齿轮减速器 :利用齿轮传动的原理进行减速。齿轮减速器通常由电机、齿轮箱和输出轴等组成,其中齿轮箱中包含有一系列的齿轮。通过不同齿轮之间的啮合和转动,实现减速效果。
- 结构特点
- 谐波减速器 :结构简单紧凑,仅有三个基本部件(驱动轴、谐波发生器、柔性轮和输出轴),组装方便,维护容易。同时,由于使用了弹性材料制作柔性轮,因此具有较好的抗冲击和振动能力。
- 齿轮减速器 :结构相对复杂,包含多个齿轮和轴承等部件。由于齿轮之间的啮合需要保持一定的精度和间隙,因此维护和调整相对困难。此外,齿轮减速器在承受较大负载时,可能会产生较大的振动和噪音。
- 性能表现
- 谐波减速器 :具有高精度、高效率、低噪音、传动比大等特点。同时,由于采用了弹性变形原理,因此具有较好的自适应性和容错能力。
- 齿轮减速器 :传动效率较高,但相对于谐波减速器来说,其精度和刚性可能稍逊一筹。同时,齿轮减速器在承受较大负载时,可能会产生较大的磨损和噪音。
- 适用范围
三、实际应用中的对比
在实际应用中,谐波减速器和齿轮减速器各有其优势和局限性。以下是一些具体的应用实例和对比:
- 机器人领域
在机器人领域中,谐波减速器因其高精度、低噪音和传动比大等特点而得到广泛应用。例如,在机器人的关节部位,谐波减速器能够实现精确的转动和定位,提高机器人的运动精度和稳定性。而齿轮减速器虽然也能实现减速效果,但在精度和噪音等方面可能无法满足机器人领域的高要求。 - 工业自动化领域
在工业自动化领域中,齿轮减速器因其承载能力强、价格相对较低而得到广泛应用。例如,在输送线、包装机等设备中,齿轮减速器能够承受较大的负载并保持稳定的传动效果。然而,在一些对精度和噪音要求较高的场合中,谐波减速器可能更为适合。 - 航空航天领域
在航空航天领域中,对传动装置的要求极高。谐波减速器因其高精度、高刚性和低噪音等特点而得到广泛应用。例如,在卫星的姿态控制系统中,谐波减速器能够实现精确的转动和定位,保证卫星的稳定运行。而齿轮减速器可能无法满足这些高要求。
综上所述,谐波减速器和齿轮减速器在工作原理、结构特点、性能表现以及适用范围等方面存在显著差异。谐波减速器以其高精度、高效率、低噪音等特点在高端领域得到广泛应用;而齿轮减速器则因其承载能力强、价格相对较低而在普通场合中得到广泛应用。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机械
+关注
关注
8文章
1771浏览量
43996 -
减速器
+关注
关注
7文章
432浏览量
24537 -
波发生器
+关注
关注
1文章
6浏览量
6361 -
谐波减速器
+关注
关注
1文章
79浏览量
5431
发布评论请先 登录
相关推荐
热点推荐
订单排到2027年!减速器市场被人形机器人“点燃”
%。 这直接导致上游核心零部件需求激增,以减速器为例,多家核心零部件厂商证实,其精密减速器、关节模组等关键部件的订单已经排到了2027年。 人形机器人产业爆发,减速器订单暴涨 近几年,众多厂商开始投身人形机器人产业,
APEX四大系列行星减速机:数控机床应用精密传动解决方案
在工业自动化与高端装备制造领域,行星减速器作为运动控制系统的核心传动部件,其精度、刚性与可靠性直接决定了整机设备的性能上限。APEX凭借深厚的技术积累与持续创新,推出新一代行星减速器四大系列——AP

普通减速机与行星减速机:如何根据工况选型不踩坑?
分流,多个行星轮同时啮合,其传动效率通常非常高,可达97%以上;而普通蜗轮蜗杆减速机由于滑动摩擦传动,单级效率通常仅能到达60%-90%,齿轮减速机效率介于两者之间。
2、 结构原理不同:行星
发表于 04-16 10:59
行星齿轮减速机如何匹配伺服电机转速?
匹配行星齿轮减速机与伺服电机转速需要根据负载特性和应用需求计算减速比。首先确定伺服电机的额定转速和负载转矩,然后通过计算所需的输出转速,选择合适的减速器。

变频器加减速时对容量有哪些影响
变频器在加减速过程中,对容量的影响主要体现在瞬时过载能力、制动能力以及热积累效应三个方面。简单来说,加减速越频繁、负载惯性越大、加减速时间设定得越短,对变频

伺服电机经减速器之后的精度问题
伺服电机经减速器之后的精度问题一直是工业自动化领域中的关键议题。减速器的引入虽然可以放大扭矩、降低转速,但同时也可能带来传动误差、回程间隙、刚性不足等问题,这些因素都会直接影响系统的最终定位精度
减速机与变频器区别,在哪种情况下可以互换?
减速机和变频器虽然都是工业传动系统中的关键部件,但二者的工作原理和应用场景存在本质差异。以下是两者的技术对比及互换性分析: 一、核心原理差异 1. 减速机(以RV

革新机器人设计:哈默纳科CSF-ULW系列谐波减速机解析
谐波减速机作为机器人关节的核心传动部件,对运动精度和性能起着决定性作用。日本哈默纳科公司在这一领域处于全球领先地位。 谐波传动的基本原理是利用金属的弹性力学特性,通过波发生器、柔轮和刚

减速机、滚珠丝杠、同步带,哪个误差较大?
方案。 一、传动原理与误差形成机制差异 1. 减速机的误差特性 减速机通过齿轮啮合实现变速,其误差主要来源于齿轮加工精度(如齿形误差、周节累积误差)和装配间隙。以
成都汇阳投资关于人形机器人打开增量空间,减速器国产替代进行时
和传动方式可分为 1)谐波减速器:体积小、 重量轻 ,传动精度高 ,运转平稳 ,传动比 大 ,适合应用于工业机器人和人形机器人之中 ,主要适用于机器人小臂 、腕部 、手部等部件 ;2)RV 减速器:具有传动效率高、传动平稳性高
哈默纳科Harmonic精密减速器 工业机器人关节运动的核心部件
灵活的完成这些指令的呢? 首先,我们需要了解工业机器人的三大核心部件:控制器、伺服电机、减速器。 1控制器是工业机器人的大脑,负责发布和传递动作指令 2.伺服电机是工业机器人的动力系统,是工业机器人运动的心脏。 3.减
人形机器人关节核心零部件,谐波减速器的技术挑战和创新发展趋势
工作原理通过波发生器驱动柔轮弹性变形,与刚轮形成周期性啮合,利用齿数差实现减速传动。 谐波减速器凭借其体积小、重量轻、精度高、传动比大等优势



评论