 高压放大器在水下扑翼软体机器人研究中的应用
高压放大器在水下扑翼软体机器人研究中的应用

实验名称:水下扑翼软体机器人的实验平台搭建
实验目的:
良好的运动性能是水下软体机器人的基本功能要求。而实验是检验设计是否合理、实验样机是否达到功能要求的重要手段。为了验证设计的可行性,通过对水下扑翼软体机器人进行相关实验,确保水下扑翼软体机器人的运动性能。首先,搭建了水下扑翼软体机器人的实验装置,进行了一系列运动能力实验。其次,为了验证前文仿真分析的可行性,通过实验数据验证了前文中仿真结果的准确性。最后,为了验证水下扑翼软体机器人的运动能力,建立了效率模型,对机器人运动效率进行了分析。
实验过程:

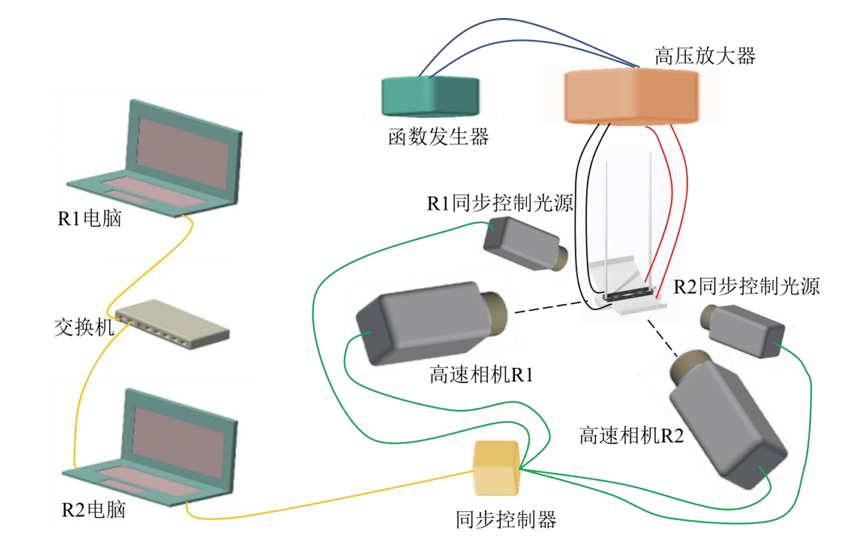
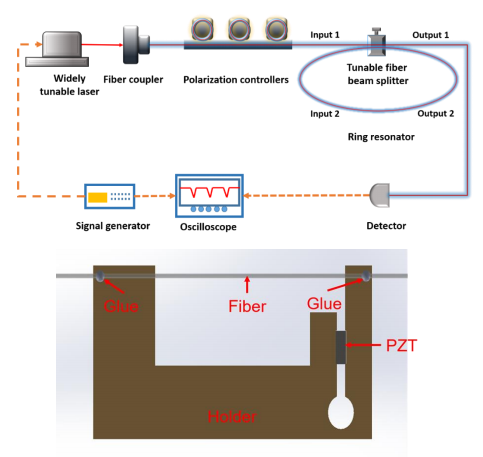
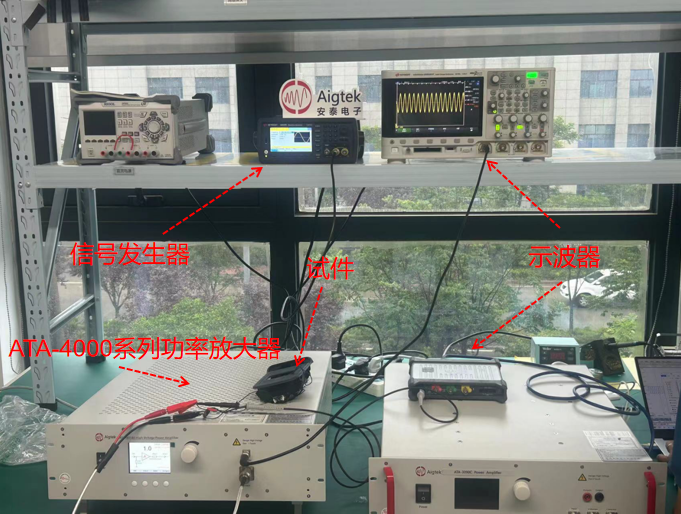
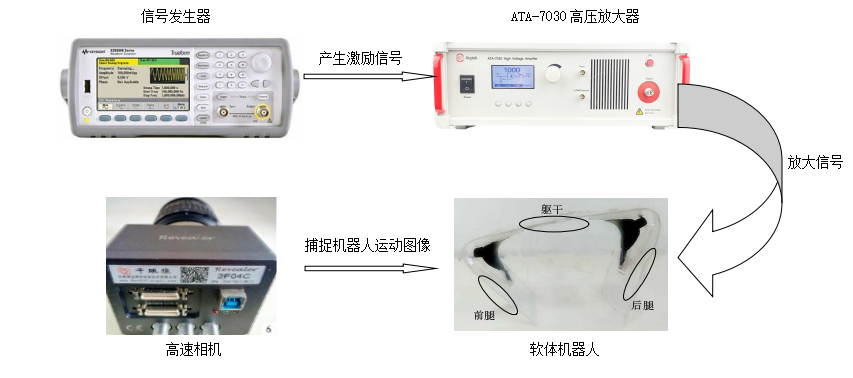
图1:实验平台示意图
分别搭建如上图所示的软体关节成型角度测量、外壳阻力测试、扑翼运动推力测试和扑翼运动测速四个实验平台。
由电机带动圆辊转动,圆辊上的细线连接拉力传感器固定端,拉力传感器测量端与水下扑翼软体机器人外壳相连,带动外壳匀速运动,得出外壳阻力。
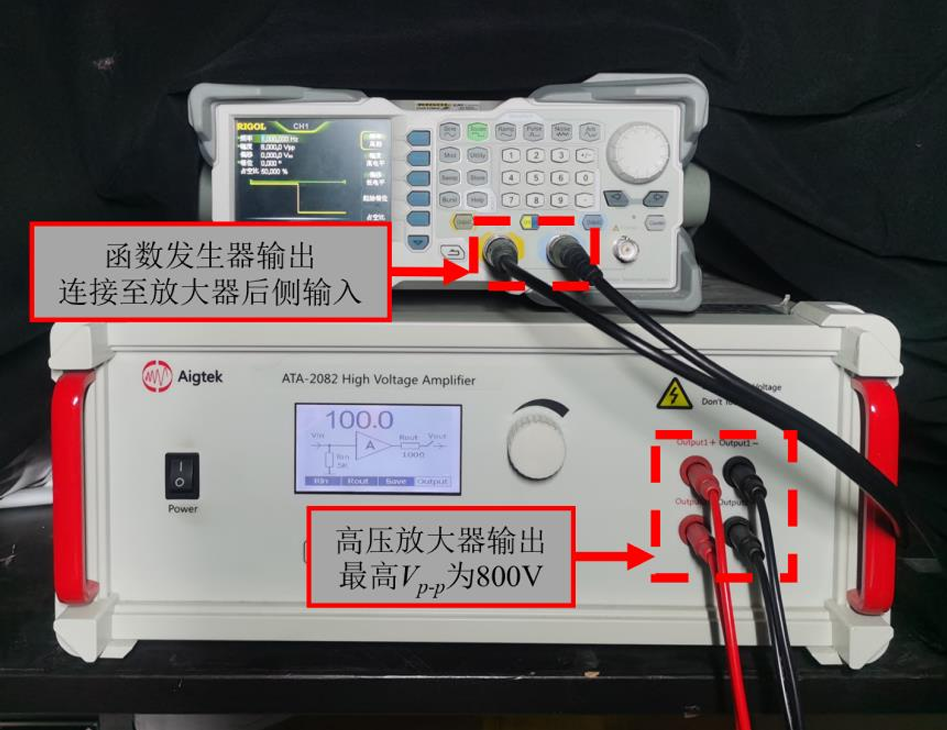
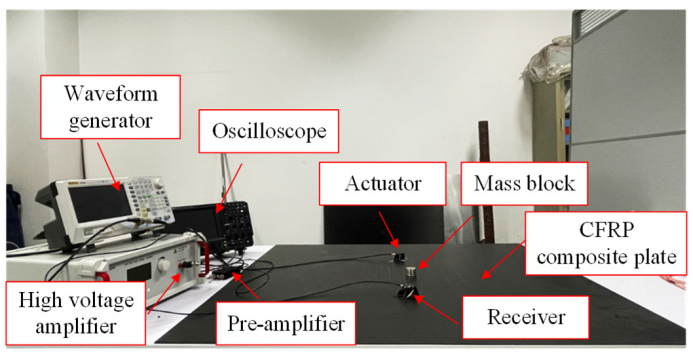
由信号发生器产生激励信号,经由高压放大器放大电压,推动水下扑翼软体机器人软体关节带动扑翼结构进行二自由度扑翼运动,测量扑翼运动过程中的推力。
由信号发生器产生的电信号驱动扑翼水下软体机器人,由机位记录机器人的运动过程,通过后期观看录像数格子的方式测算机器人的行进速度。
实验结果:
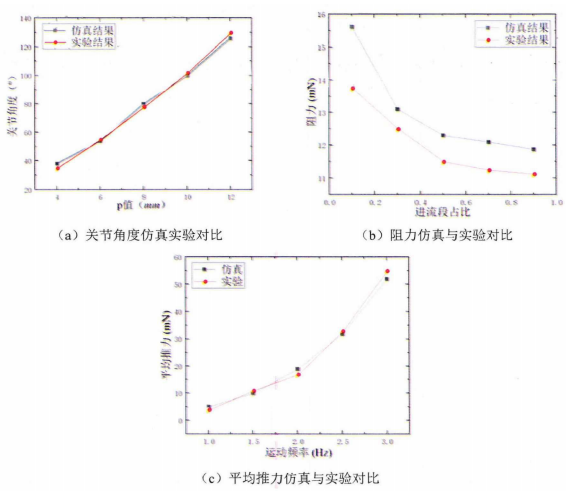
图2:仿真与实验结果对比图
对q=7mm、p=4、6、8、10、12时的软体关节成型角度进行测量,并与仿真结果进行对比,结果如图2(a)所示。从图中可以看出,当q值不变时,随着p值增大,变形角度减小,这与仿真结果变化规律相同,且实验结果与仿真结果相近,这也验证了仿真结果的真实性。
根据设定的仿真条件,对扑翼运动产生的推进力进行测量。在水动力仿真中,输出结果为扑翼弦截面在二维流场中产生的推进力,实验结果为三维环境中扑翼运动的推进力,其结果对比如图所示。从图中可以看出,仿真结果的变化规律与实验结果相同,这验证了扑翼运动水动力仿真结果的正确性。
电压放大器推荐:ATA-7050
图:ATA-7050高压放大器指标参数
本资料由Aigtek安泰电子整理发布,更多案例及产品详情请持续关注我们。西安安泰电子Aigtek已经成为在业界拥有广泛产品线,且具有相当规模的仪器设备供应商,样机都支持免费试用。高压放大器https://www.aigtek.com/products/bk-gyfdq.html
审核编辑 黄宇
-
机器人
+关注
关注
214文章
31697浏览量
224668 -
高压放大器
+关注
关注
4文章
820浏览量
16064
发布评论请先 登录
安泰电子ATA-2022B高压放大器在磁性软体微机器人中的应用

Aigtek高压放大器在章鱼触手仿生光敏压电机器人研究实验中的应用

ATA-7030高压放大器在压电软体机器人设计中的应用

电压放大器在超声微机器人及管道研究实验中的应用

高压放大器成为机器人研发的“隐形引擎”
高压放大器ATA-7030在电致变形柔性致动器表情机器人控制实验中的应用
高压放大器在介电弹性体软体机器人中的应用

高压放大器在机器人攀爬速度测试实验中的应用
电压放大器在机器人研究实验中的应用





评论