 自动驾驶中一直说的BEV+Transformer到底是个啥?
自动驾驶中一直说的BEV+Transformer到底是个啥?

在很多车企的自动驾驶介绍中,都会听到一个关键技术,那就是BEV+Transformer,那BEV+Transformer到底是个啥?为什么很多车企在自动驾驶技术中都十分追捧这项技术?其实“BEV(Bird’s Eye View)+Transformer”是两个方向的技术,BEV是一种全新的3D坐标系,而Transformer则是一种深度学习神经网络模型,BEV+Transformer的组合方案在感知、理解和预测方面表现得更为强大,彻底终结了2D直视图+CNN时代。BEV+Transformer通过鸟瞰视角与Transformer模型的结合,显著提升了自动驾驶系统的环境感知与决策支持能力。BEV+Transformer的首次亮相是由特斯提出,高效解决了其纯视觉方案下多个摄像头的数据融合的问题,随后国内的小鹏、理想、蔚来等车企以及毫末智行、百度Apollo、商汤、地平线等Tier 1也纷纷跟进,提出了自己的BEV+Transformer方案。
 Tier 1智能驾驶集感知模型应用,来源:亿欧智库
Tier 1智能驾驶集感知模型应用,来源:亿欧智库
BEV(鸟瞰视角)的概念
1.BEV的定义和背景
BEV即“Bird’s Eye View”(鸟瞰视角),顾名思义,它能够将视觉信息立体化,如同一只鸟儿在车辆正上方俯瞰,周围的环境信息以自上而下的方式展示在坐标系中,可以生成是以车辆为中心、从高空俯视车辆周围环境的视角。与摄像头获取的前视图相比,BEV视角能够显示更多的车辆周围信息。这种视角在自动驾驶中十分重要,因为它为感知系统提供了更广阔的空间视野,有助于系统更好地理解复杂交通场景中的多方位环境。
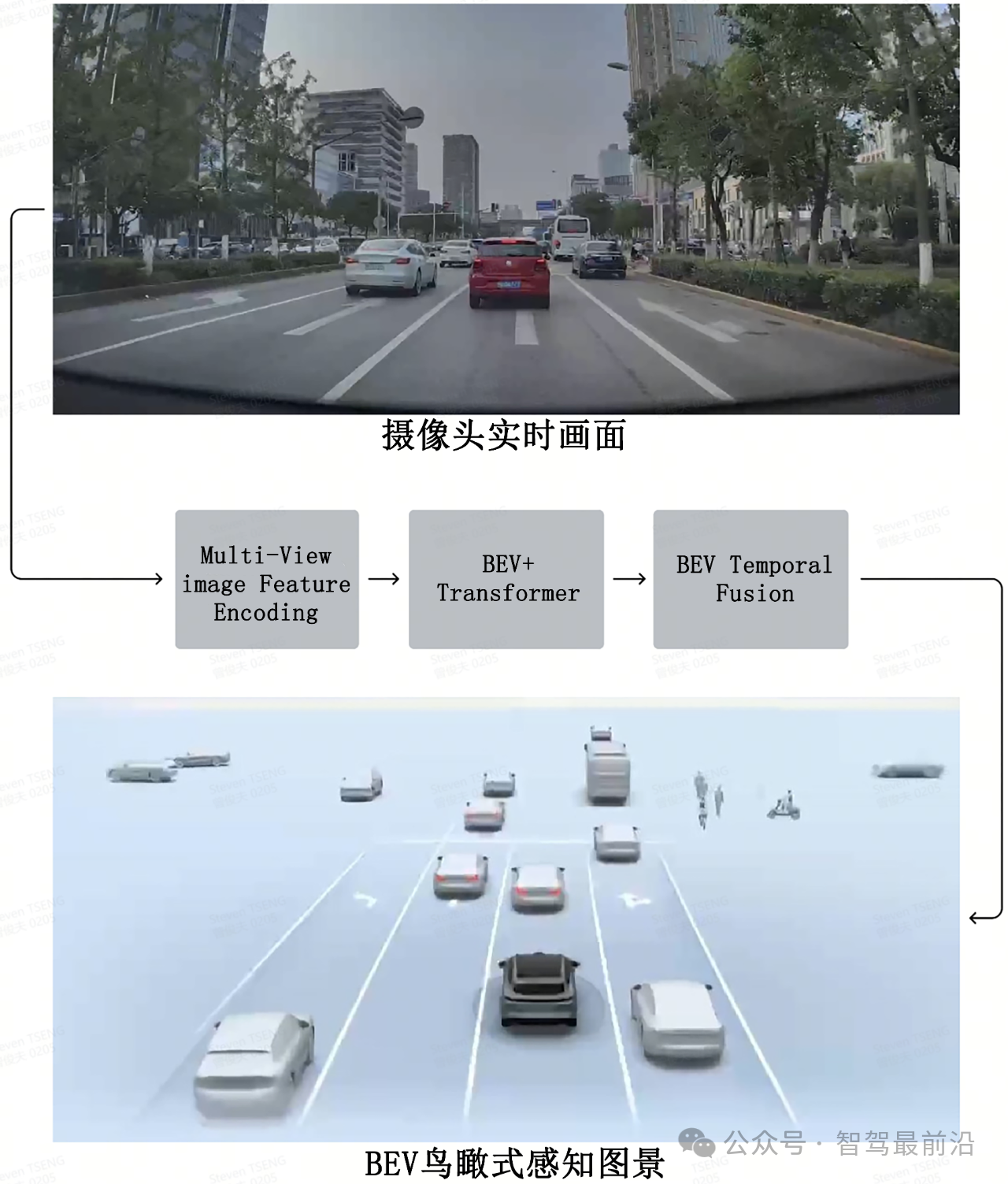
2.BEV视角的生成过程
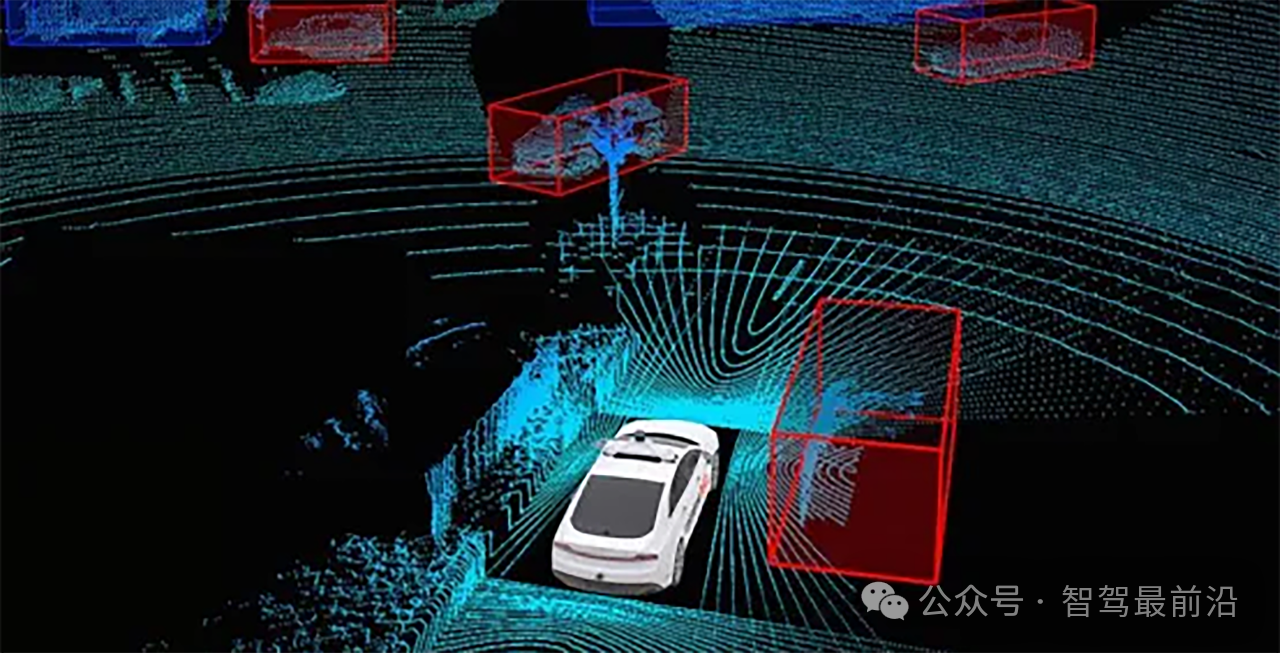
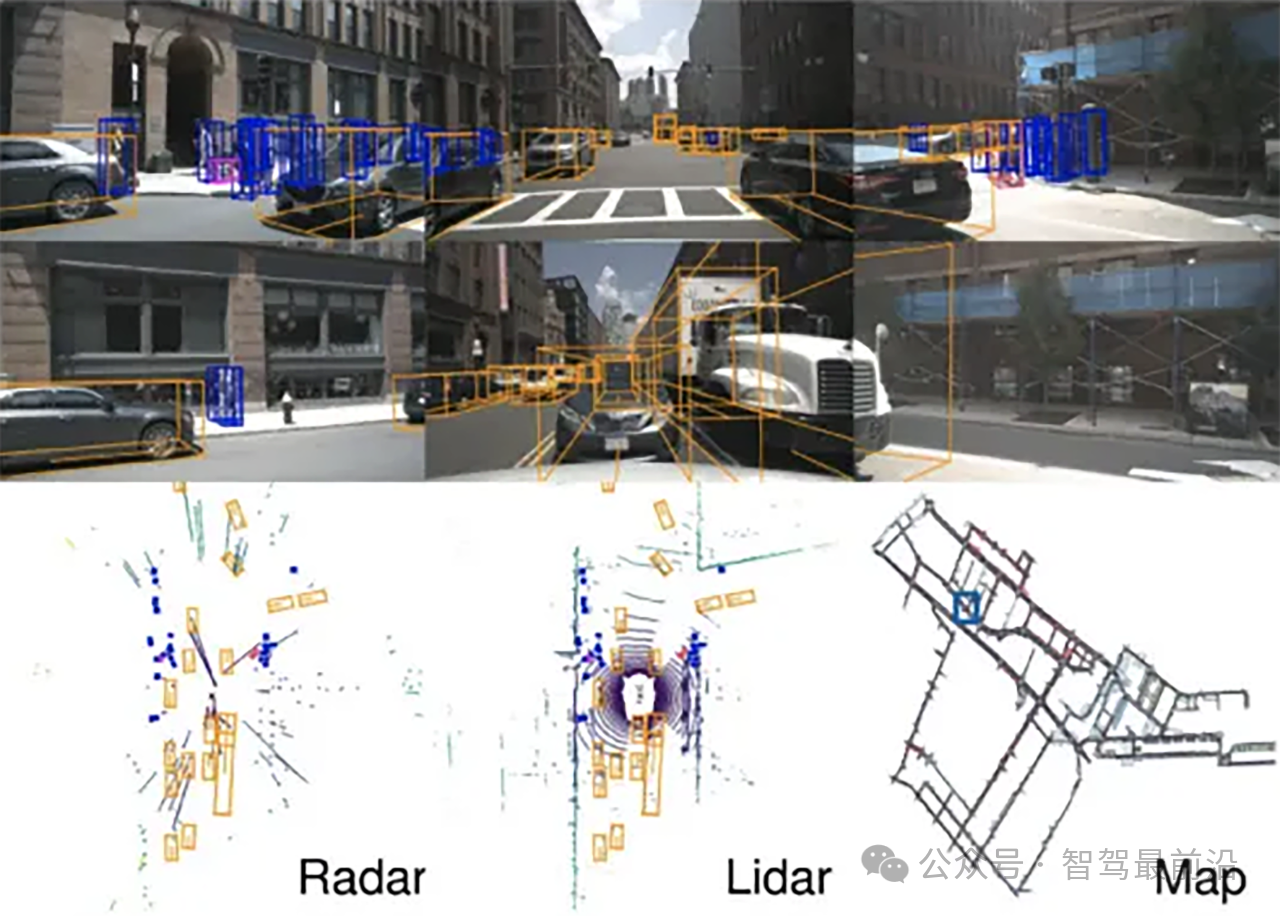
获取BEV视角通常依赖于多种传感器的数据融合,如摄像头、激光雷达和毫米波雷达。这些传感器以不同角度捕获环境数据,然后通过深度估计、几何投影(尤其是透视投影变换)和坐标转换等步骤,将各视角的图像或点云数据整合为一个鸟瞰图。特别是在摄像头生成BEV视角的过程中,这种投影转换需要考虑到图像的畸变和透视效果,以确保视角的准确性。
3.BEV视角的实际应用
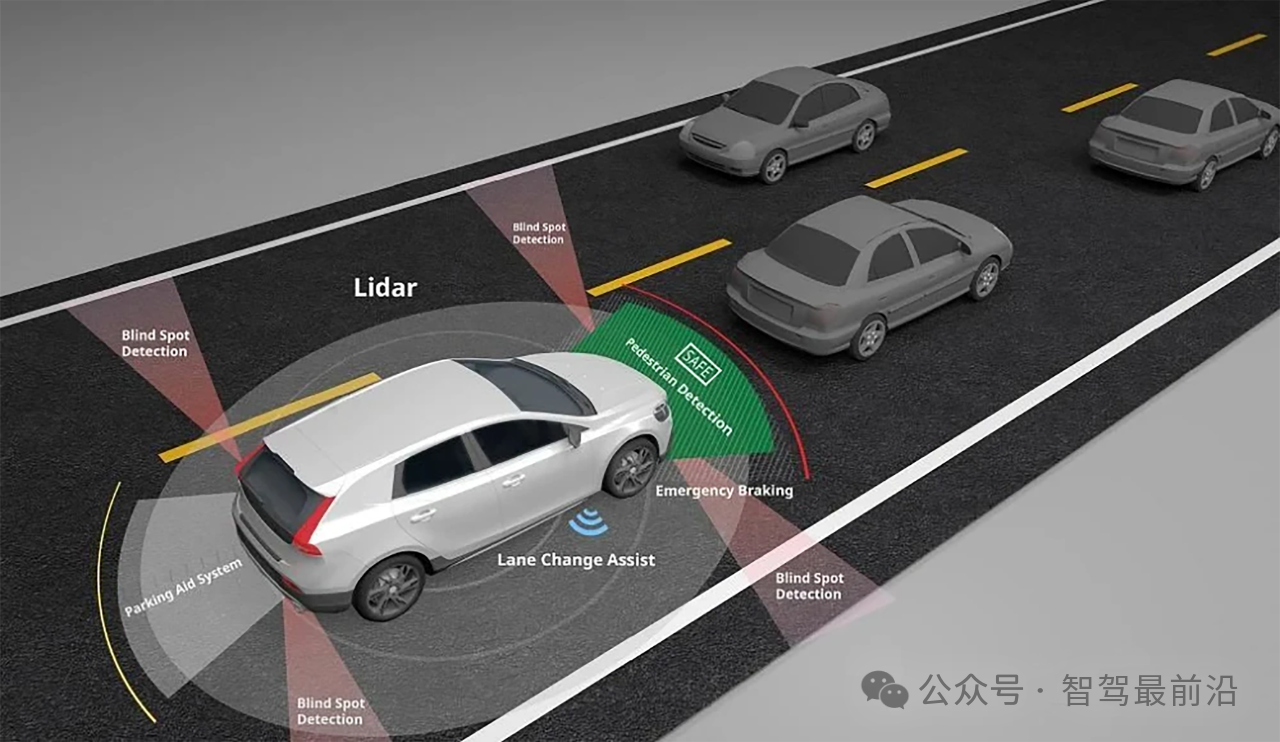
BEV视角在自动驾驶中的应用主要体现在复杂交通场景下的环境理解,如多车道并行、十字路口和环形交叉路口等。通过BEV视角,系统不仅可以识别前方物体,还能准确检测车辆四周的障碍物、行人、非机动车和建筑物,从而为安全行驶提供更全面的环境信息。
Transformer的基本概念与作用
1.Transformer模型的起源
Transformer模型最早由谷歌在2017年的“Attention is all you need”一文中提出,最初用于自然语言处理(NLP)领域的翻译和文本生成任务。与传统的RNN、LSTM模型不同,Transformer的自注意力机制(Self-Attention)允许其处理任意长度的输入序列,且并行计算性能强,因此在大规模数据处理和高效计算方面有显著优势。随着AI深度学习的兴起,Transformer被应用在BEV空间转换、时间序列上,形成了一个端到端的模型。
2.Transformer在视觉任务中的扩展
Transformer模型逐步被应用于计算机视觉(CV)任务,如目标检测、语义分割和物体跟踪等。其自注意力机制能够在图像上捕捉全局信息并分析不同位置特征之间的关系,帮助系统建立物体之间的空间关系。这在复杂场景下尤其重要,例如城市道路中需要理解不同车辆、行人之间的动态交互。
3.Transformer在BEV视角中的作用
在BEV+Transformer架构中,Transformer模型负责将BEV视角中的特征图信息转化为高层次的语义信息。通过自注意力机制,Transformer能够在特征图上找到重要物体之间的相对位置关系,并分析它们的行为趋势。例如,Transformer可以识别车道内外车辆的距离和速度关系,有助于预测其他车辆的运动轨迹。
BEV+Transformer的技术原理
1.多传感器数据融合与转换
BEV+Transformer的核心在于将来自不同传感器的数据统一转换为BEV视角的特征图,再利用Transformer进行深度分析。首先,通过卷积神经网络(CNN)对摄像头和雷达数据提取特征,并进行投影转换生成BEV视角的特征图。这样就能在车身上方生成完整的俯视图,为Transformer模型提供丰富的环境信息。
2.自注意力机制的全局关系分析
Transformer模型利用自注意力机制分析BEV特征图中的不同位置特征,建立物体与物体之间的相关性。例如,系统可以分析道路上的车辆、行人、障碍物的分布及其相对速度,预测他们的行为变化趋势。这种全局关系的分析使得系统对复杂场景的环境理解更加深刻和准确。
3.高层次语义信息的输出与决策支持
Transformer处理完BEV视角特征后,生成的输出包含环境的高层次语义信息,包括物体类别、位置、运动趋势等。这些信息不仅可以用于路径规划,还能辅助车辆进行避障和动态调整。在自动驾驶决策模块中,这些高层信息与其他预测结果结合,生成更加智能的驾驶策略。
BEV+Transformer的实际应用案例
1.障碍物检测与识别
BEV+Transformer架构可在复杂交通场景中识别各类障碍物,包括车辆、行人和道路设施等。通过自注意力机制,系统能够在特征图中捕捉到环境中关键物体的位置和运动方向,并对潜在的障碍物进行跟踪检测,有助于及时生成避障方案。
2.路径预测与动态规划
在路径预测方面,BEV+Transformer架构通过学习环境中各参与者的运动特征,预测车辆和行人等的行驶轨迹。这种全局化预测在车流密集的场景中尤为重要,能够帮助自动驾驶系统提前分析其他交通参与者的行为趋势,从而制定更安全、顺畅的行驶路径。
3.车道线识别与辅助驾驶
在高速公路或复杂路口,车辆需要精准识别车道线以保持在车道内行驶。传统摄像头的识别易受光线和视角影响,而BEV+Transformer结合了全方位的鸟瞰图,确保了在恶劣条件下也能稳定识别车道线,使车辆在变道或急转弯时更安全。
BEV+Transformer的优势
1.全局视角与空间理解能力
BEV视角带来了全局性的环境感知能力,能够减少车辆周围盲区。Transformer的自注意力机制则增强了系统的空间理解能力,在BEV特征图中识别出场景内物体的长距离关系,使得自动驾驶系统对复杂环境的认知更全面。
2.多模态数据的统一融合
BEV+Transformer架构能够在统一的特征图中处理多传感器信息,提升了感知的精度。例如,图像与点云数据经过前期融合后,再经由Transformer分析,大大减少了因多传感器不一致而产生的误差,从而提升了模型的鲁棒性。
3.有效的预测能力
Transformer在视觉任务中展现出的强大预测能力,使BEV+Transformer架构可以更准确地预测其他车辆、行人的行为。尤其在动态交通场景中,Transformer结合BEV信息能提供精细的路径预测,帮助自动驾驶系统提前识别潜在风险。
BEV+Transformer的局限性与挑战
1.计算资源需求与实时性挑战
Transformer的自注意力机制对计算资源需求较大,尤其是在处理多传感器融合数据时,可能会导致推理延迟问题。自动驾驶系统需要达到毫秒级响应速度,这对计算资源提出了高要求。一些优化技术(如分块自注意力)可以减小负担,但实现高效实时推理仍是挑战。
2.传感器精度和同步性依赖
BEV+Transformer的表现高度依赖传感器的精度与同步性。在复杂环境中,天气、遮挡、反射等因素可能导致传感器获取的信息出现偏差,从而影响BEV视角的准确性。传感器误差会使Transformer的分析结果不可靠,影响系统的整体表现。
3.复杂交通场景的鲁棒性
BEV+Transformer在高动态交通场景下(如城市密集路段)可能受到影响,因为这些场景包含大量动态物体及不确定因素。在应对恶劣天气、光线变化及不同国家的道路标志差异时,BEV+Transformer的鲁棒性仍需进一步验证和优化,以保证系统能适应多样化的场景。
结语
BEV+Transformer架构为自动驾驶领域带来了新的技术突破。通过结合鸟瞰视角的全局信息和Transformer的自注意力机制,该架构显著提升了感知精度和决策支持能力。然而,要在实际道路场景中实现其广泛应用,还需克服计算资源、传感器同步性等方面的挑战。未来,随着硬件技术的进步和算法优化,BEV+Transformer有望成为自动驾驶系统的重要组成部分,为完全自动驾驶奠定坚实的技术基础。
审核编辑 黄宇
-
自动驾驶
+关注
关注
794文章
15008浏览量
181619 -
Transformer
+关注
关注
0文章
156浏览量
6962
发布评论请先 登录
自动驾驶中常提的“深度估计”是个啥?

Transformer如何让自动驾驶大模型获得思考能力?
自动驾驶BEV Camera数据采集系统:高精度时间同步解决方案

自动驾驶中毫米波雷达到底有何作用?

Transformer如何让自动驾驶变得更聪明?
自动驾驶中常提的ODD是个啥?

自动驾驶中Transformer大模型会取代深度学习吗?

自动驾驶中常提的RTK是个啥?

自动驾驶中常提的惯性导航系统是个啥?可以不用吗?

自动驾驶中常提的高精度地图是个啥?有何审查要求?

自动驾驶中常提的世界模型是个啥?

自动驾驶中常提的HMI是个啥?
浅析4D-bev标注技术在自动驾驶领域的重要性
自动驾驶中常提的“点云”是个啥?




评论