 伺服驱动器的控制方式分析
伺服驱动器的控制方式分析

1. 引言
伺服驱动器作为连接电机与控制系统的桥梁,其性能直接影响到整个系统的响应速度、稳定性和精度。随着控制理论的发展和电子技术的革新,伺服驱动器的控制方式也在不断进化。
2. 伺服驱动器的基本工作原理
伺服驱动器通过接收来自控制系统的指令信号,精确控制电机的转速和位置。其基本工作原理包括信号处理、电流控制和电机驱动三个主要环节。信号处理环节负责将指令信号转换为电机可以理解的控制信号;电流控制环节负责调节电机的电流,以实现对电机转速和力矩的精确控制;电机驱动环节则是将控制信号转化为电机的物理运动。
3. 伺服驱动器的控制方式
伺服驱动器的控制方式主要可以分为以下几种:
3.1 开环控制
开环控制是一种简单的控制方式,它不依赖于系统的反馈信息。在开环控制中,伺服驱动器根据输入的指令信号直接控制电机的运动,而不考虑电机的实际运行状态。这种方式的优点是结构简单、成本较低,但缺点是控制精度和稳定性较差,适用于对精度要求不高的场合。
3.2 闭环控制
闭环控制,又称反馈控制,是一种基于系统反馈信息的控制方式。在闭环控制中,伺服驱动器不仅接收指令信号,还接收来自电机的反馈信号(如位置、速度等),通过比较指令信号和反馈信号的差异,动态调整电机的控制参数,以达到精确控制的目的。闭环控制的优点是控制精度高、稳定性好,但成本相对较高,适用于对精度和稳定性要求较高的场合。
3.3 比例-积分-微分(PID)控制
PID控制是一种经典的闭环控制方式,它通过比例(P)、积分(I)和微分(D)三个环节来调整控制信号。比例环节根据误差的大小调整控制信号,积分环节消除稳态误差,微分环节预测误差的变化趋势。PID控制的优点是算法简单、鲁棒性强,适用于多种类型的系统,但需要精确的参数调整。
3.4 模糊控制
模糊控制是一种基于模糊逻辑的控制方式,它通过模糊规则来处理不确定性和非线性问题。在模糊控制中,伺服驱动器可以根据模糊规则动态调整控制参数,以适应复杂多变的工作环境。模糊控制的优点是适应性强、易于实现,但算法复杂度较高。
3.5 自适应控制
自适应控制是一种能够根据系统参数变化自动调整控制参数的控制方式。在自适应控制中,伺服驱动器可以实时监测系统的状态,并根据监测结果调整控制策略,以保持系统的最优性能。自适应控制的优点是能够应对系统参数的变化,但算法实现较为复杂。
4. 控制方式的比较与选择
不同的控制方式有其各自的优势和局限性。在选择伺服驱动器的控制方式时,需要根据具体的应用场景和性能要求进行综合考虑。例如,对于精度要求极高的精密加工设备,闭环控制和PID控制可能是更好的选择;而对于成本敏感且精度要求不高的场合,开环控制可能更为合适。
5. 伺服驱动器控制方式的应用案例分析
为了进一步说明不同控制方式的实际应用效果,本文将分析几个典型的应用案例。
5.1 精密机械加工
在精密机械加工领域,如数控机床,闭环控制和PID控制被广泛采用。这些控制方式能够确保刀具的精确位置和速度,从而提高加工精度和表面质量。
5.2 机器人手臂
在机器人手臂的应用中,自适应控制和模糊控制可以提供更好的灵活性和适应性。这些控制方式能够使机器人手臂在复杂的工作环境下保持稳定和精确的运动。
5.3 包装机械
在包装机械中,开环控制和PID控制是常见的选择。这些控制方式能够满足包装机械对速度和位置控制的基本要求,同时保持较低的成本。
-
电流
+关注
关注
40文章
7224浏览量
141572 -
控制系统
+关注
关注
41文章
6986浏览量
114369 -
电机
+关注
关注
145文章
9694浏览量
154731 -
伺服驱动器
+关注
关注
22文章
568浏览量
33628
发布评论请先 登录
EtherCAT转CANOPEN网关+伺服驱动器,药品包装线精度这样炼成

伺服驱动器增益参数的调整方法
伺服驱动器最常见的故障及解决方法



西门子S7-1200 PLC与SINAMICS V90伺服驱动器PROFINET通信控制实例
人形机器人伺服电机驱动器新动力:高性能电容器的协同作用

三相驱动器怎么跟伺服接线
工业机器人伺服驱动器配哪样的UPS不间断电源比较好


使用西门子报文控制V90伺服驱动器

EtherCAT主站转Profinet网关接IS620N伺服驱动器与西门子plc通讯案例

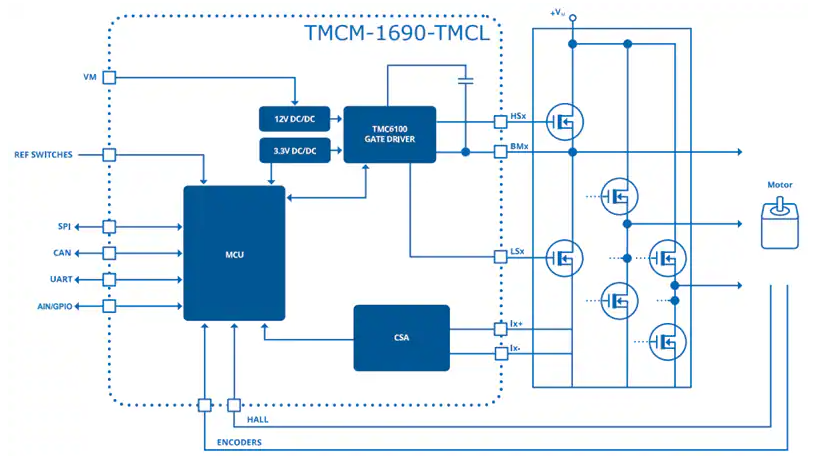
Analog Devices Inc. TMCM-1690-TMCL伺服控制器栅极驱动器模块数据手册
东元伺服驱动器报警代码

富士伺服驱动器的常用故障代码及其检查与维护




评论