 麻省理工学院推出新型机器人训练模型
麻省理工学院推出新型机器人训练模型

近日,据TechCrunch报道,麻省理工学院的研究团队展示了一种创新的机器人训练模型,该模型突破了传统模仿学习方法的局限,不再依赖标准数据集,而是借鉴了大型语言模型(LLM)如GPT-4等所使用的大规模信息处理方式,为机器人学习新技能开辟了全新的道路。
传统的模仿学习方法中,机器人通过观察和模仿执行任务的人类或其他代理进行学习。然而,这种方法在面对诸如照明变化、不同环境或新障碍等小挑战时,往往因为缺乏足够的数据而难以适应。为了克服这一难题,麻省理工学院的研究团队探索了一种新的解决方案,他们借鉴了大型语言模型的强大数据处理能力,并引入了异构预训练变压器(HPT)这一创新架构。
新论文的主要作者王立睿指出,与语言领域的数据以句子形式存在不同,机器人领域的数据具有高度的异质性。因此,如果想以类似语言模型的方式进行预训练,就需要构建一种全新的架构。HPT正是这样一种架构,它能够整合来自不同传感器和环境的多样信息,并利用变压器技术将这些数据汇总到训练模型中。值得注意的是,变压器的规模越大,其输出效果也越好。
在使用该新型训练模型时,用户只需输入机器人的设计、配置以及期望完成的任务,系统便能根据这些信息为机器人提供所需的技能。这一创新不仅提高了机器人学习的效率和灵活性,还为实现更广泛、更复杂的机器人应用奠定了坚实的基础。
卡内基梅隆大学副教授戴维·赫尔德对这项研究给予了高度评价。他表示,我们的梦想是拥有一个通用的机器人大脑,用户可以直接下载并使用它,而无需进行任何额外训练。虽然目前我们还处于这一愿景的早期阶段,但借助规模化的优势,我们有望在机器人策略方面取得像大型语言模型那样的突破性进展。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
214文章
31682浏览量
224618 -
LLM
+关注
关注
1文章
352浏览量
1416
发布评论请先 登录
相关推荐
热点推荐
小米开源VLA大模型后训练全流程:亚毫米级操作突破引领机器人产业革命
在机器人技术领域,小米集团近日宣布开源VLA大模型Xiaomi-Robotics-0的后训练全流程,这一突破性进展标志着智能机器人从实验室走向实际生产的"最后一公里"正式打通。该
解读大型语言模型的偏见
。这种“位置偏差”意味着,若律师使用LLM支持的虚拟助手检索30页宣誓书中的某个短语,该短语位于第一页或最后一页时被找到的可能性会大得多。麻省理工学院的研究人员揭示了

从机械狗关节拆解看懂激光焊点里的硬核科技
最近,一篇关于拆解MITMiniCheetah(迷你猎豹)执行器的文章在工程师圈子里热传。这只由麻省理工学院仿生机器人实验室打造的机器狗,以其灵活的后空翻和高速奔跑能力惊艳世界,而其核心奥秘就在高速

从讲义到学院:钱学森1963年的“星际蓝图”与2026年的现实回响
历史的坐标:1961年的讲台与2026年的揭牌1961年秋,中国科学技术大学近代力学系的教室里,钱学森先生拿起了粉笔。在接下来的几个月里,他将自己在美国加州理工学院和麻省理工学院积累的深厚学识

东莞理工学院“小眼睛科技杯”第四届集成电路设计与创新应用竞赛圆满落幕
BASEDINNOVATION“小眼睛科技杯”集成电路设计与创新应用竞赛2025年11月23日,东莞理工学院第四届集成电路设计与创新应用竞赛于学术会议中心圆满落幕。本届竞赛由校团委、学生工作部

新理论模型为下一代锂电池研发破局:充放电速度与寿命双提升
密切相关。 近日,美国麻省理工学院的研究团队在这一领域取得突破性进展,他们首次系统测量多种电池材料中的锂离子嵌入速率,并基于实验数据提出全新理论模型,为下一代锂电池的设计提供了清晰路径,该成果已发表在最新一期《
格罗方德与新加坡理工学院签署谅解备忘录
2025年10月15日,格罗方德新加坡公司(GlobalFoundries Singapore,简称GFS)与新加坡理工学院(Singapore Polytechnic,简称SP)签署了一份谅解备忘录,旨在就新加坡半导体行业的数字人才培养展开合作。
小萝卜机器人的故事
经过我的申请,
马老师发放了,
小萝卜机器人的,
开发权限,
原来的小萝卜公司,
因为经营不善倒闭,
作为科研产品,
几个技术对此惋惜,
自掏腰包,
要让小萝卜机器人,
再生,
每次听到小萝卜说
发表于 10-23 05:24
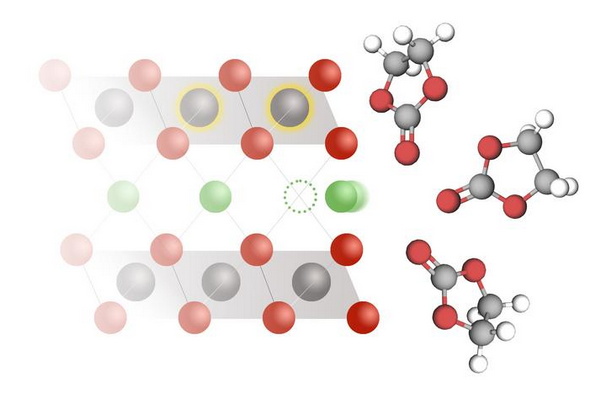
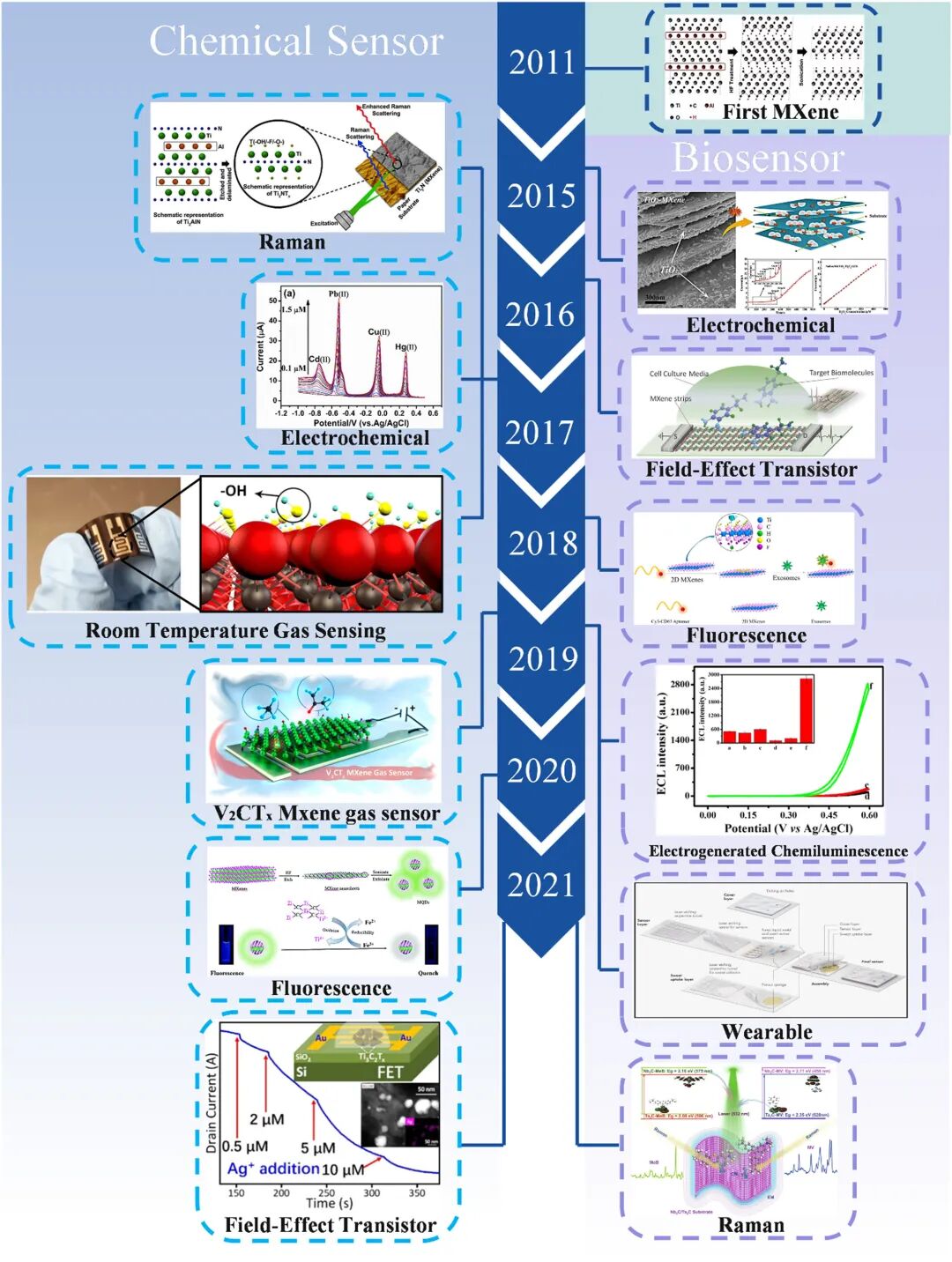
苏黎世联邦理工学院、西南交通大学:关于研究MXenes-环境生化传感平台新型材料
近日, 苏黎世联邦理工学院王京课题组 联合 西南交通大学赵志俊课题组 及 四川大学张传芳课题组 ,在 高起点新刊Electron 发表了题为“MXenes: Emerging Materials
利用NVIDIA Cosmos模型训练通用机器人
机器人领域的一大核心挑战在于如何让机器人掌握新任务,而无需针对每个新任务和环境耗费大量精力收集和标注数据集。NVIDIA 的最新研究方案通过生成式 AI、世界基础模型(如 NVIDIA Cosmos

Wolfspeed与纽约州立大学理工学院加强教育研究合作
纽约州立大学理工学院(SUNY Poly)在 近日举行的新闻发布会上宣布,任命两名教职人员为 Wolfspeed 捐赠讲席教授(Wolfspeed Endowed Chairs),标志着该校研究扩展的重要里程碑。
【万字长文】物联网的激荡二十年
(InternetofThings)”。虽然业界一致认为,1999年,麻省理工学院的KevinAshton首次提出”物联网”这一术语,但仅仅只是一个理念,没有成体系的解释,也无法形成共识。而I

突破麻省理工学院技术垄断,深圳传感器公司带来全新机器人触觉传感器技术
近日 戴盟机器人CEO段江哗 赴亚特兰大参加 2025 IEEE国际机器人 与自动化大会(ICRA 2025) 顾不上时差带来的疲惫感 他一下飞机 就投入到筹备工作中 在这次海外首秀上 这家深企带来

伟创力与麻省理工学院 (MIT) 就其全新的“新制造倡议”(INM) 达成战略合作
行业巨擘+全球顶级学府 近日,伟创力与 麻省理工学院 (MIT) 就其 全新的“新制造倡议”(INM) 达成战略合作 。作为INM行业联盟的 创始成员 ,伟创力将在这一项目中与MIT的研究人员
麻省理工学院香港校友会代表团到访华沿机器人
近日,麻省理工学院香港校友会(MIT Club of Hong Kong)代表团40余人到访华沿机器人总部,通过展厅参观、技术交流与座谈研讨,深入了解国产机器人产业发展现状,并就“机器人



评论