 LiDAR传感器自动驾驶技术正朝我们走得越来越近
LiDAR传感器自动驾驶技术正朝我们走得越来越近

随着智能驾驶和自动驾驶的市场前景被炒热,越来越多的人进入这个行业,开发各种相关技术和产品。其中LiDAR传感器开始吸引到众多人注意。这个传感器不仅可以应用于ADAS(高级驾驶辅助系统)和自动驾驶汽车,还可以应用于无人机、工业自动化、地图绘制以及机器人等其它应用。
LiDar与雷达区别
雷达(Radar)一词是英文“Radio Detection & Ranging”的缩写,它与激光雷达的区别是其能量源的不同。就像其名字所表明的一样,雷达是一种使用无线电作为其能量源的传感器,主要用于探测目标物体是否存在并确定其距离,有时也要确定目标的角度位置。
激光雷达(LIDAR)是Light Detection & Ranging的缩写,是激光探测及测距的简称,它是一种激光器作为辐射源的雷达,是激光技术与雷达技术相结合的产物。
LiDAR技术最早是欧美一些发达国家为了满足海图制图、港口和港湾测量的特殊需要于上世纪60年代中期提出并于80年代开发出来的,一直到上世纪90年代初该技术才趋向成熟。
自动驾驶的LiDar技术
现在做无人驾驶主要两种解决方案,一种是采用激光雷达解决方案,车顶的元器件称之为LiDAR,采用这种方案的有Google、百度、Uber,不过这种方案较贵,例如Google在其无人车原型中使用的Velodyne雷达售价就为7万美金;因此,另有其他厂商采用了低成本解决方案,例如在车前车后各部署毫米波雷达和用于ADAS功能的摄像头。
这两种解决方案各有优势:LiDAR,类似于鲸鱼声呐、或是蝙蝠的发声器官,其原理是通过获取“光脉冲打在物体上并反射回到接收器的传播时间”,再根据光速已知的原理,将传播时间转换称LiDAR据测量物的距离。也就是说,LiDAR在测距的精确性上很有优势。而采用“毫米波+ADAS”的视觉解决方案,对于物体的精确识别、色彩等等,可以更直接地捕捉。其实视觉解决方案对近处的距离识别也颇为精准,例如我们的眼睛可以轻易的辨认出近处物体的景深。但总的来说,在较远情况下,搭配LiDAR可以产生更好的效果。
福特在美国亚利桑那州威特曼地区测试了一项夜幕中自动导航行驶的测试。
在 “伸手不见五指”的福特亚利桑那汽车试验场开展此次夜间环境路测,在福特汽车看来是一次向完全自动驾驶技术开发的重要一步。也是向实现“将完全自动驾驶技术的便利带给全球消费者”这一承诺实质性进展。这项试验说明,即便缺少了依赖可视光线方可工作的摄像头,福特使用的LiDAR传感器的性能足够强大,可以同车载虚拟驾驶软件协同工作,操控车辆平稳地在蜿蜒的公路上顺利行驶。
这项测试对自动驾驶技术虽然没有革命性的提升,但是改进了人们对自动驾驶的认识,虽然对自动驾驶技术来说,雷达、摄像头和LiDAR激光测距、定位导航传感器三者兼备是最理想的状况,但试验证明,LiDAR传感器完全具备“独自作战”的能力,即便在没有车灯照明的情况下也能正常工作。
为了在黑暗环境中自如行驶,福特自动驾驶测试车辆使用了高分辨率的三维地图——这些地图已完整包括了道路、道路标识、地形地貌,以及指示牌、建筑、树木等地势地标信息。行驶过程中,测试车辆通过LiDAR发射脉冲,以在地图上对自己进行精准的实时定位。同时,通过雷达接收到的数据能够与LiDAR传感器数据进行整合,进一步完善自动驾驶车辆全面的传感能力。
在沙漠测路测中,福特汽车的工程师们使用夜视镜,在车内及车外对测试车辆进行了全面的观察。夜视镜能帮助他们清楚观察到,车辆行驶过程中,车载LiDAR传感器不断向车身四周发射出网格状的红外激光射线。LiDAR传感器能发射频率为280万/秒的激光脉冲,对周围环境进行精确扫描。
LiDAR鼻祖Velodyne的“超级冰球”
福特自动驾驶夜测使用的这款LiDar传感器,是Velodyne 公司最新生产的激光雷达测距传感器——固态混合超级传感器(SH Ultra PUCK Auto)——该设备因其形状及大小类似冰球而被称作 “超级传感冰球”。
Velodyne最初成立于1983年,至今已有有30多年的历史。Velodyne自1983年发明了以音波测距方式高增益伺服控制系统,以降低及限制扬声器输出所产生的失真。到了2005年,它发明了激光雷达。
2005年,Velodyne创始人 David Hall 利用立体视觉技术参与 2004 到 2005 年 DARPA (国防高等研究计划署)无人驾驶汽车挑战赛之后,最初没有人能够完成任务,2006年,David Hall 发明了可以旋转360度的64线的激光雷达。
Velodyne 目前已经量产销售的激光雷达有三款:分别为HDL-64E(64 线)、HDL-32E(32 线)、VLP-16(16 线)。谷歌、百度、Uber 等无人驾驶汽车多在使用其64 线产品。
Velodyne 64 线最早用于地图及相关行业,32 线主要用于固定翼无人机。 在过去几年,Velodyne LiDAR 的主要订单来自地图行业、机器人行业,以及安保行业。以安保为例,Velodyne可以通过观察人群的流向,来发现异动。
随着无人驾驶的概念在近年的升温, 汽车行业未来将成为一大需求来源。 福特就已在其第三代自动驾驶车型上使用了 Velodyne 最新的激光雷达测距传感器(LiDAR)——固态混合超级传感器(SHUltra PUCK™ Auto),之所以叫这个名字,是因为它的形状及大小类似冰球而被称作 “超级传感冰球”。
LiDAR进行物体扫描的时候,是采用作为“感知系统的硬件+计算功能的软件”做成,增加激光线数后,可以减轻软件的计算负担。
硬件内部的每一条线都有一对激光发射器和接收器组成,其以20 圈每秒的速度旋转,放出的激光要达到 100 米至 200 米的距离,而为保证精确测距,需要保证激光在完成这100-200米的路程后,刚好能让发射出去的激光要被成对的接收器收到。
另外,为了保证人眼安全,Velodyne的激光雷达发射的激光线束是采用了人眼安全1级激光,平时对肉眼不可见,不过如果你采用和激光频率接近的硬件拍摄Velodyne的这款雷达,是可以看见激光线束的。
LiDAR要做到商用,价格要做到实质性降低,目前,Velodyne的产品线价格区间大致是,64线8万美元、32线4万美元,上面用于无人机的VLP-16约为8000美元。在今年1月份拉斯维加斯上展出的SHUltra PUCK™ Auto尚处于概念机阶段,没有大规模量产。而Velodyne LiDAR价格之所以居高不下,是因为目前其机器都是采用手工制作,要保证激光的发射和接收不出差错,手工组装和调校普遍耗时。
目前Velodyne也已经与车厂建立了合作关系,车厂会对Velodyne的新品进行测试,预计Velodyne在2017 年将会推出迭代版本,并在2018 年第四季度推出芯片级的产品(期望做到500美元),并最终投放在 2020 年的车型上。
全固态LiDAR得自动驾驶天下
机械式LiDAR依赖宏观的转动部件,而混合固态LiDAR借助“微动”器件实现发射端的激光束扫描功能。由于全固态LiDAR内部没有任何宏观或微观上的运动部件,耐久性和可靠性的优势不言而喻,且顺应了自动驾驶对LiDAR固态化、小型化和低成本化的趋势,因此成为群雄逐鹿的终极方向。
未来自动驾驶的LiDAR技术将是全固态LiDAR(SS LiDAR)的天下
LiDAR技术分类:(1)按照发射端分类:单点、多通道、可操纵或相控阵列、泛光面阵式;(2)按照接收端分类:单点、线阵、二维阵列。
目前,直接切入全固态LiDAR或者正朝着全固态LiDAR转型的国内外企业数量已逐步超越机械式LiDAR和混合固态LiDAR领域。
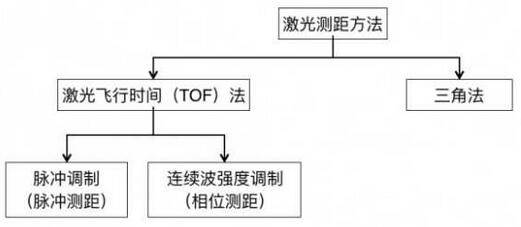
激光雷达测距方法分为飞行时间法和三角法两大类。目前,汽车全固态激光雷达大多采用飞行时间法。
按照全固态LiDAR发射端照明方式可以分为激光多束发射、可操纵或相控阵列、泛光面阵发射三种模式。
按照全固态LiDAR探测端的接收技术,可以分为相干接收技术和直接接收技术。直接接收技术是接收光子能量的直接形式,优点是技术简单和成熟。相干接收技术的接收灵敏度,速度分辨率高,但需要接收机的频带特别宽,对激光发射的频率稳定度的要求也高,对光学天线系统和机内光路的校准的要求更严格,信息处理单元更复杂。
全固态LiDAR按照发射端的光波特性和接收端的探测技术进行分类及代表企业
无人驾驶的技术方案目前还在不断地完善中,市场上有声音认为自动驾驶汽车并不一定需要LiDAR,也有说自动驾驶汽车需要LiDAR和先进的摄像头、雷达传感器协同配合,才能实现真正的自动驾驶;更有试验证明,LiDAR传感器完全具备“独自作战”的能力。但这都说明,自动驾驶技术正朝我们走得越来越近。
-
传感器
+关注
关注
2577文章
55443浏览量
793722 -
自动驾驶
+关注
关注
794文章
14976浏览量
181347 -
LIDAR
+关注
关注
11文章
368浏览量
31577
原文标题:自动驾驶的LiDar技术
文章出处:【微信号:WW_CGQJS,微信公众号:传感器技术】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录



评论